
HOME >> 鉄道模型自動運転システム > 卓上レイアウトで楽しもう 自動運転 その7の4
卓上レイアウトで楽しもう 自動運転 その7の4
自動運転 その7の2のレイアウトでは運行状態を、その3ではソフトを紹介しましたが、今回は構成するハードを紹介しましょう。、
■ ワンタッチセンサのメンテナンス
今回のパターンでは、カーブ部分の線路に通過センサを設置する必要がありました。 これに対応できるセンサはワンタッチセンサしかありませんので、より確実に作動するように整備することにしました。
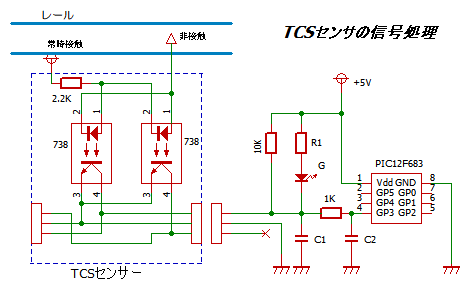
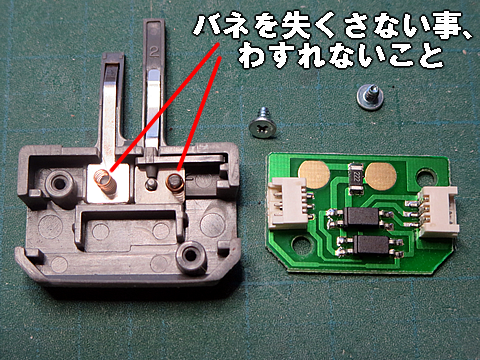
まず、TOMIX のセンサの機能を復習しておきます。 「TCSセンサの信号出力」(2019/11/5) にて報告していますが、3本のセンサ線の中央がGNDであり、左右の2本からの信号線の通電をフォトカプラを使って制御している構成です。 センサ端子は手前の線路とは常時通電状態ですが、奥側の線路とは非接触の状態であり、金属製車輪が通過している時には、右の写真にしめす爪の部分が車輪のフランジと接触してレールと通電状態となります。
この時、フォトカプラに電流が流れて、信号線とGNDが通電して信号線の電位をGND状態にします。 レールの通電極性に応じてどちらかのフォトカプラが反応しますので、それの応じて両側にある信号線のどちらかが反応します。 この信号線を回路図の様にプルダウン配線にして信号と取り出す事ができますが、車輪が通過する信号がON状態で、信号線がLOW状態なる所謂 負論理で構成 されていることになります。 ただし、LEDを回路図のように結線しておくと、逆に正論理で点灯しますので、センサの作動状態を表示させることが出来ます。
さて、ここでセンサとして作動させるためには、車輪の通過時に爪の部分と確実に接触するかどうかなのです。 多くの不良センサの場合、この爪の部分が奥に入り込んだままでであったり、爪の横を車輪のフランジが通り過ぎたリして機能不全になっています。 そこで、小さなマイナスドライバーで爪の部分の動作状態をチェックしてみましょう。 不良であれば調整作業が必要です。
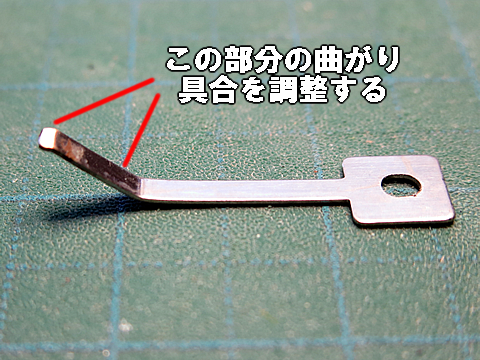
調整作業にはセンサを分解して作業するのが確実です。 分解した状態を下左に示します。 細かいバネは無くさないように注意してください。 バネですのでピンとはねてどっかに飛んで行き、探し出すのに一苦労します。 次に爪の部分の部品を取り出し、下右の写真に示す部分を調整します。 どのように調整するかは図面がありませんので、組んではチェックして、不良であればまた分解する作業の繰り返しです。 この作業を何度か実施するとコツが分かってきますが、いい加減な作業は、センサの作動不良となりますので根気が必要です。
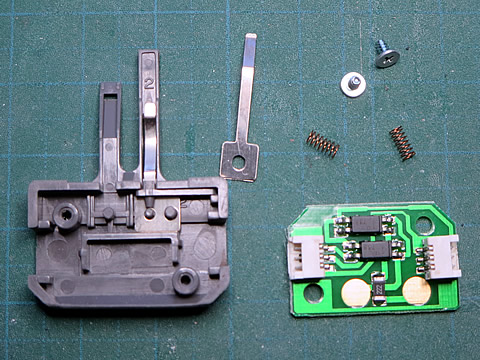
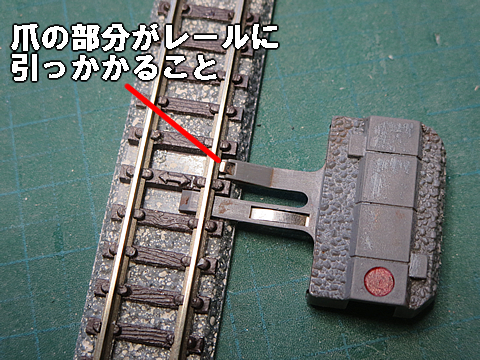
組付け時には下左の写真の様にバネを忘れないようにしましょう。 そして、レールにセットする時、手前のレールに爪が引っかかる事を確認します。 スムースに通過出来る場合は、爪が奥に引っ込んでいる不良状態と思われるのでNGと判断されます。 引っかかる場合には合格として、小さなマイナスドライバなどで、爪の部分を押し込んでレールの奥に挿入します。
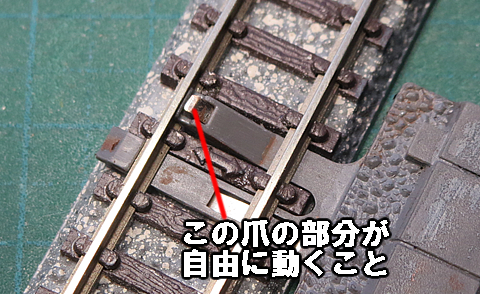
次に、レールの奥にしっかりと差し込んだ状態で、下左の写真のように、爪の部分が自由に動くことを確認します。 そして、台車等を走らせて車輪との接触状態をチェックします。 下右の写真。
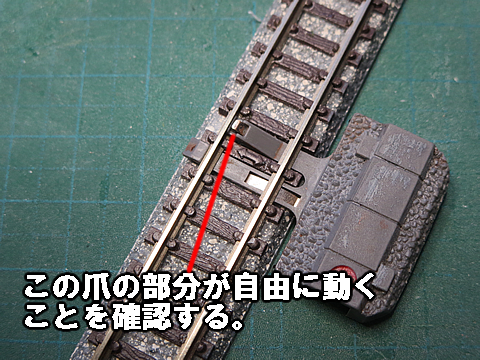

車輪のフランジによって、爪の部分が下に下がる事を確認します。 場合によっては、爪の横をすり抜け行く場合がありますのが、これは爪とレールとの間の隙間が大き過ぎるためですので、再調整が必要です。
調整が完了したセンサには良品としての目印としてシールは貼り付けて置きました。 下左の写真。
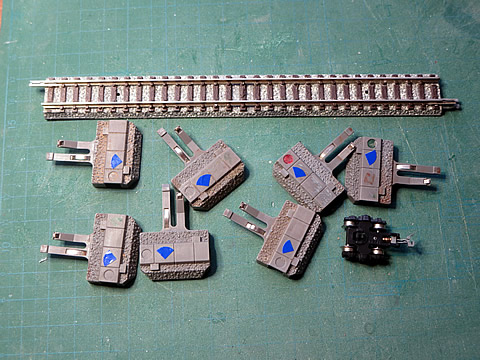
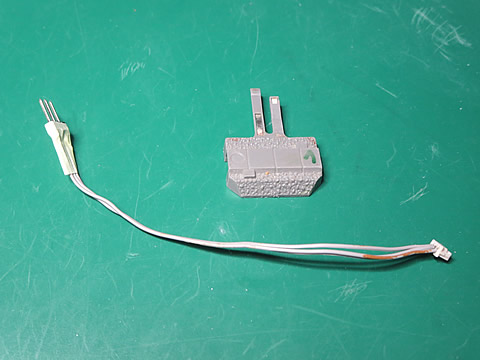
次に、センサ信号線を説明します。 この信号線は特注品の様ですので、わが信号処理基板との接続用にピンヘッダをハンダ付けしています。 上右の写真。 信号線は短い物など4本加工しました。 下左の写真。 この加工した信号線は信号処理基板との接続用専用線ですので4本で間に合っていますが、遠くに設置したセンサの場合には届きません。 そこで、センサを中継器として使用し、センサ線を接続して使用することが出来ます。 センサの回路図を見ると理解できると思います。
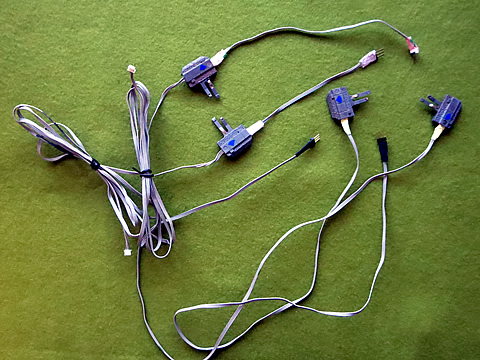
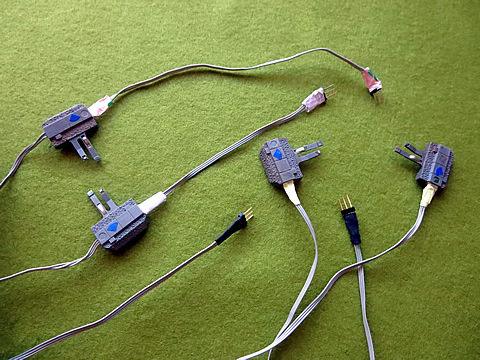
もし、バネを失くして不良品となったセンサでも、中継器として利用できますので捨てないで下さいね。
■ センサ処理回路
センサ信号をマイコンに取り込むための処理回路をユニット化しました。 この工作は「自動運転 その5」(2019/11/18)で簡単に報告しましたが、回路構成を下左に示します。 4回路分をひとつの基板上に構成してユニットとしました。
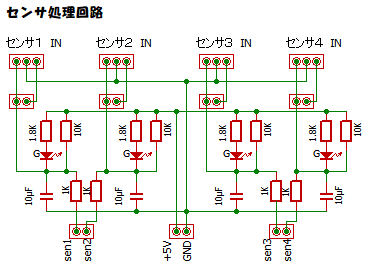
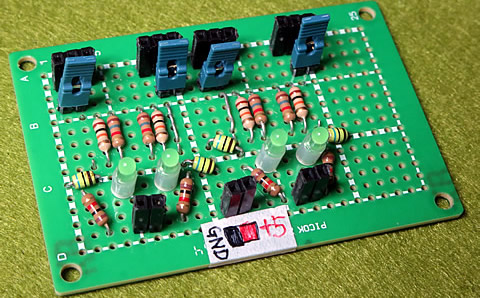
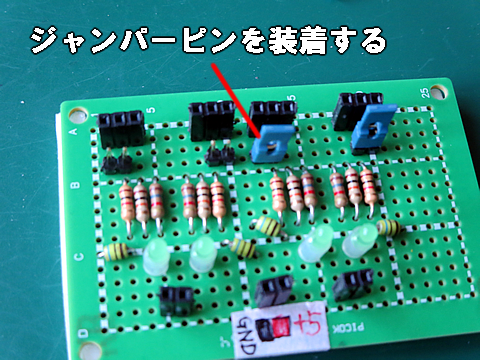
センサ信号線の両側の線は、車輛の進行方向に合せて反応するように設定されていますが、進行方向の判別を必要としない場合には、両側の信号線を接続させておく必要があります。 このためにジャンパーピン用のピンヘッダを設け、ジャンパーピンを装着出来るようにしています。 もし、個別に判別する必要が生じた合には、このピンヘッダ回路を活用して処理回路を連携させれば対応できます。
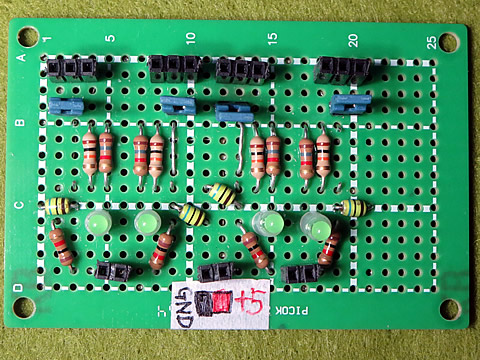
なお、最初の報告では1KΩの抵抗の位置が違っていましたので、修正しました。 上右の写真は修正前の状態で、上左が修正後の写真です。 上の回路図も修正済みの状態です。
 .
.
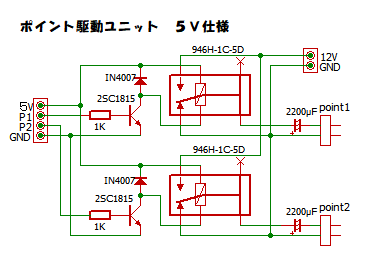
■ ポイント駆動ユニット 5V仕様
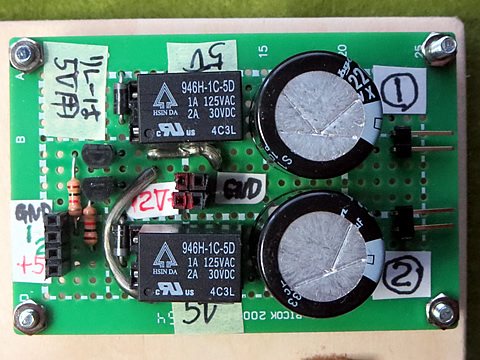
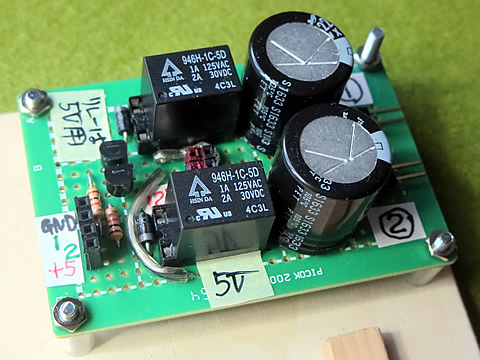
小型リレーとコンデンサを使用したポイント駆動回路です。 ストック品の小型リレーには、5volt 仕様のものと、12volt 仕様のものがありましたので、まず、5volt 仕様のリレーを使ってユニット化しました。
リレーは、HSIN DA 製の5V小型リレー 1C 接点で 2A 仕様のリレーです。 接点容量に余裕が無さそうですが、レイアウトに組み込む訳でもないので使いました。 リレーは容易に交換できるように、ICソケットを介して取り付けていますので安心です。
なお、このユニットではリレー駆動の12V回路と信号処理用の回路は完全に分離しています。 また、へたくそな回路構成でしたので、基盤上面を使って配線を余儀なくされています。
下にそのユニットの状態を示します。 裏側の配線は相変わらずのイモハンダですので遠慮しました。
 .
.
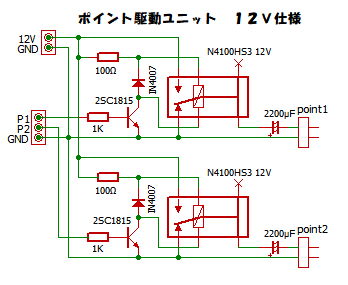
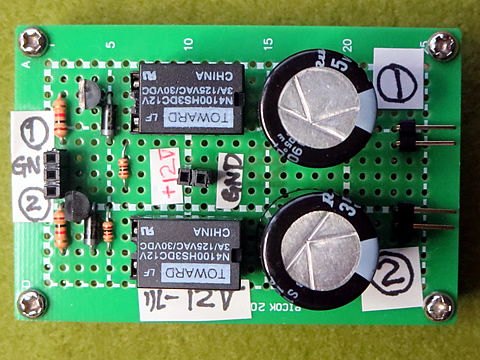
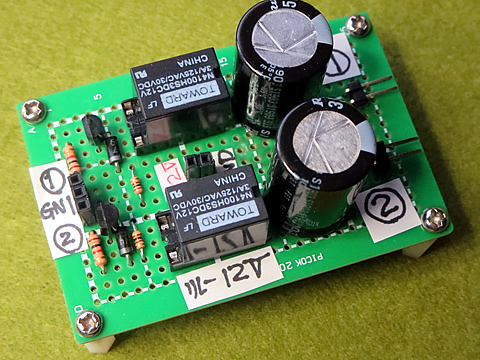
■ ポイント駆動ユニット 12V仕様
リレー容量が3Aのリレーもストックされていましたので、こちらの仕様でユニットを追加製作しました。 リレーはTOWARD製のDC12V N4100HS3 12V です。
リレー駆動回路の電源はポイント駆動電源を使うこととしましたので、GNDは共通としました。 また、安全のために、100Ω抵抗も挿入しています。 配線の取り回しも工夫しましたので表に出なくて済ました。
なお、ポイントへの配線口はピンヘッダを水平に出す様にしていますので、ポイントを配線しない場合のショートには注意することにしますし、接続方向も、実際の配線後に確認することにします。
 .
.
■ 給電制御ユニット
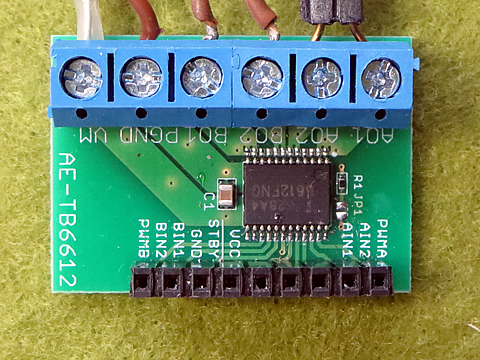
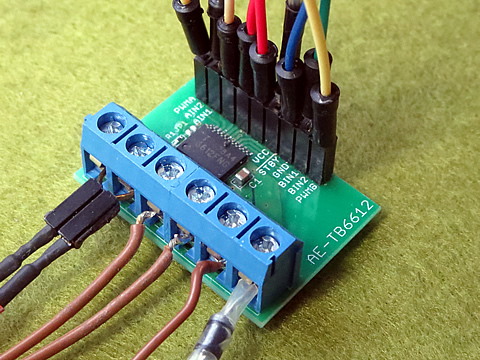
給電制御ユニットは、「部品を揃える」(2019/11/4)でも紹介したものです。 秋月で見つけた「TB6612使用 Dual DCモータードライブキット」を組み立てました。 ユニット間の配線の方法の統一のために、ピンヘッダの代わりにピンホルダを表側に取付けました。 下の写真。
このユニットはMOS素子を使用しているため高い周波数のPWM制御が出来そうで、ドライバの説明書によるとスイッチング周波数は100kHzまで許容しているとかで、モータのうなり音から解消できそうですが、 肝心の発信元が未だ対応できていません。
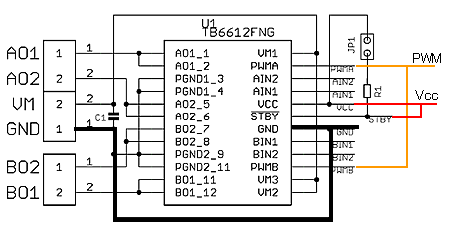
説明書から回路図を無断コピーして右に示しま。 これによると、信号系と駆動系回路のGND が連通しています。 また、PWM信号はA回路とB回路を共通して使用する場合が多いので連通回路を追加して信号線を減らすことも出来ますが、色々な使い方に対応するために外部のジャンパーピンで対応することにしました。 スタンバイ線も同様です。
 .
.
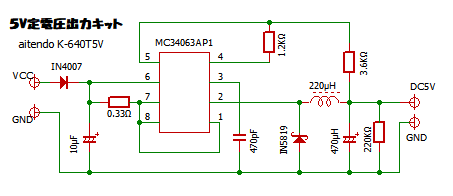
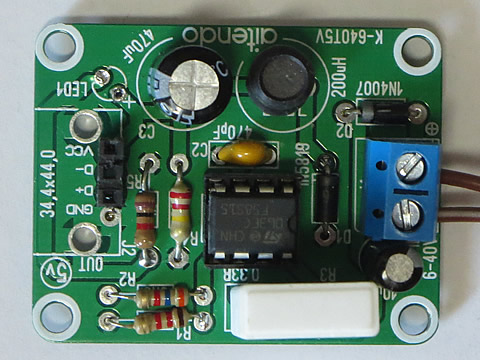
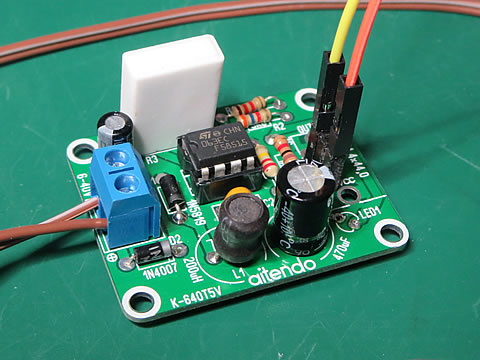
■ 5ボルトの電源
信号処理のための電源には5Vを供給することにしましたが、その電源として、Arduino の5volt 出力を使う、ACアダプタを使う、ポイント駆動用の12volt 電源から取り出すなどの方法があります。 マイコンとしてPICマイコンも使いたいので専用電源を確保することにしました。 その方法として、ポイント駆動用の12volt 電源から取り出すために格好のキットを見つけていましたので、このキットを組み立てて使用しました。 この件も、「部品を揃える」(2019/11/4)で紹介したものです。
このキットには回路図がありませんでしたので、回路を追って作成したものを右に示します。 このキットの 5volt 出力はUSB端子を使うようになっていましたが、ピンホルダに変更しています。
 .
.
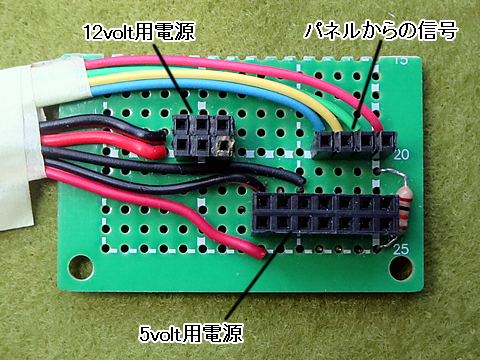
■ 配線類
各ユニットに供給する 12volt 電源と 5volt 電源の配電盤をひとつの基板にまとめました。 そして、両方の電源のGND を連結し、電位差の統一に配慮しました。 各ユニットの基板がバラバラですので、信号のやり取りに弊害が無い様にGND 電位を揃えるためであります。
さらに、操作パネルからの信号を取り込むためのポートもここに設けました。
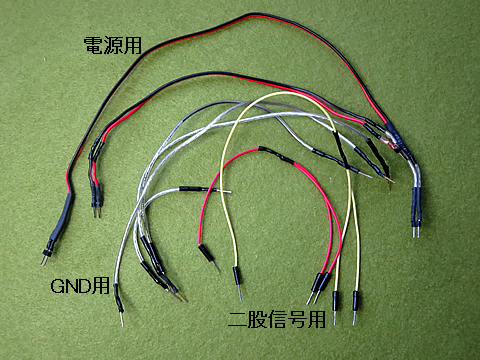
最初はあり合わせのジャンパー線やレイアウト用に加工した線などを使用していましたが、だんだん専用線を作るようになりました。 例えば、下左の写真に示す様に、電源用にはピンヘッダを端子にしてジャンパー線より少し太めの線を使って加工しています。 また、ユニット間を結ぶGND線は、さらに太めの線を使って、長短のある専用線にしました。
また、給電制御ユニットでは、PWM線とスタンバイ線は、ひとつの信号線から2本の信号線を取り出す必要があり、ブレッドボードを使って接続していましたが、ジャンパー線を加工して二股の専用信号線としました。 これによって配線が簡単になりました。
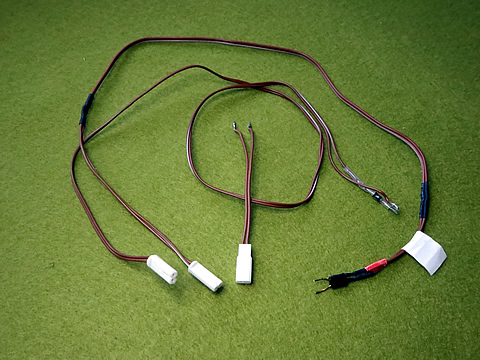
下右の写真は、TOMIXのフィーダー線の切れ端です。 レイアウトなどの工作のために細工してきたものを活用しています。ですが、
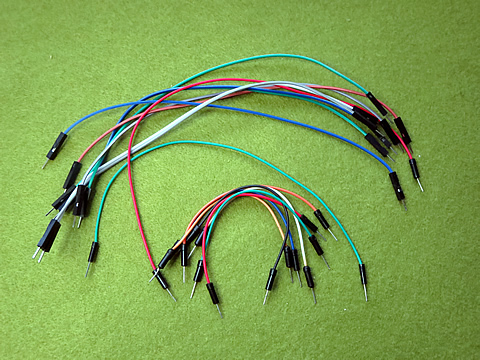
ユニット間の通信線にはブレッドボード用に使用しているジャンパー線を使用しています。 種類や長さなどを分別して整理しておきます。
■ その他の制御機器
ジャンパー線などを外した状態のユニットなどを下に示す。 下左に示す制御盤の裏側のは、スイッチ類との接続は上で紹介した配電盤用の基板を経由するようにしています。 この操作パネルには、 5volt 電源のON/OFFスイッチ、 12volt 電源のON/OFFスイッチ、運行開始スイッチ、Arduino 用のリセットスイッチ、二つの可変抵抗、およびDC12volt用のACアダプタのソケットを取り付けています。
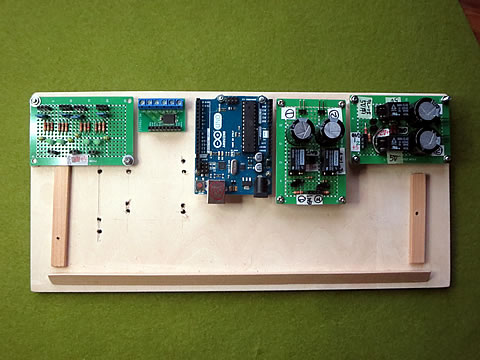
下右は、これまで使用したユニット類です。 PICマイコンを使用する場合は、Arduino の位置を予定しています。 使用にあたってはブレッドボードを考えています。
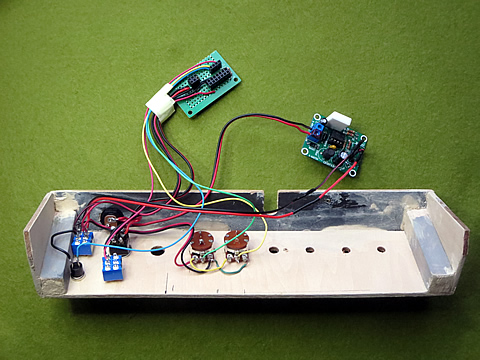
下左は、制御盤を裏側から見た状態です。
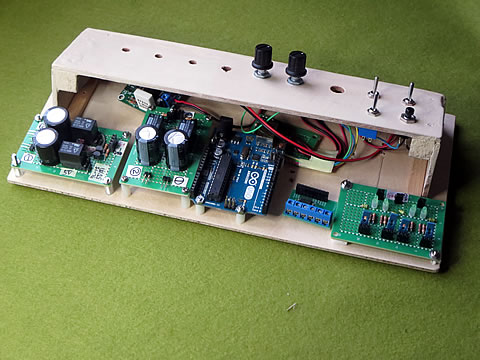

なお、走行のための電力供給は、12volt 電源を使ってのPWM 制御を本命と考えているものの、使い勝手からすると上右に示すパワーユニットも活用するつもりです。
そして、加速と減速時にはPWM制御を考えているので、右上のパルス制御(PWM 制御)方式のパワーユニットは使いないと思っていました。 しかし、パワーユニットは20KHz であり、 Arduino は1KHz弱なのでその差は20倍もありますので、問題無いではないかと思って試しに使ってみました。
全然問題ないですね!
という訳で、今後は使い易いユニットを使っていく事にします。
■ 自動運転その7の制御回路
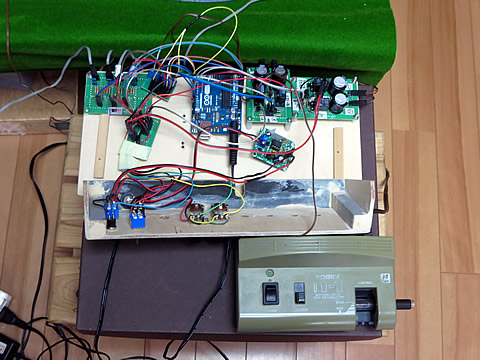
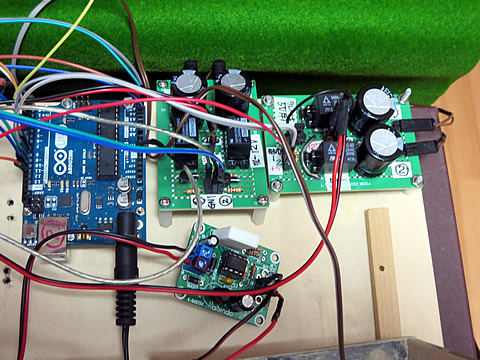
最後に、今回実施した制御回路を紹介します。
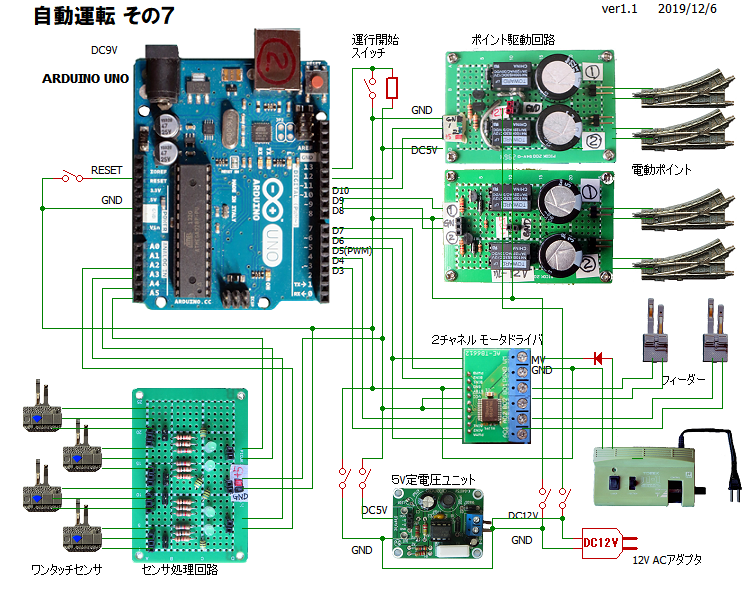
また、配線状態を再掲載いたします。
**********************************************************************************************
なお、期待して待っていた カトー/(N) 11-109 ポケットライン用 チビ凸用動力ユニット の発売が1ヵ月遅れますとの連絡がありましたが、なんと昨日届きました。 クリスマス商戦の間に合うように頑張ったのでしょうね。 このため、当面はこの動力を使って遊ぶことにします。
2019/12/5 作成 12/7 一部修正