
HOME >> 鉄道模型自動運転システム > 卓上レイアウトで楽しもう 自動運転 その21
卓上レイアウトで楽しもう 自動運転 その21
レイアウトをまたまた変更しました。 自動運転 その7 と同じようなパターンですが、中央部のクロスを中心とした四葉のクローバーの形のレイアウトです。 この交差点を中心として、周辺部をグルグルと巡回させる走行パターンを考えています。 そして、二つの電車をマスゲームのように交差させながら走行させようと目論んでいますが、まず、いち編成の電車だけを走らせてみることにしましょう。
■ 新しいレイアウトの内容
まず、新しく設置したレイアウトの概要を説明します。 中央部に交差点を配置して、クロス線路を設け、回りの4ヶの地域をそれぞれ周回するように構成した。 ポイント線路は、左右に分岐するYポイントが2個しかなかったので、のころの2個はミニポイントを使いました。 また、出来る限りワイドトラム線路を使用するようにしましたが、センサ部分やポイント部分は対応できませんでした。 さらに、きっちりとカーブ部分を接続させることが出来なかった上に、卓上の大きさに制限があったため、無理やりつなげた箇所もいくつかあります。 でも、電車はスムースに走行しており、脱線等はまだ発生していません。

線路だけでは寂しいので、いままでと同じように建物類も置いています。 制御ボックスなども今までの物を使用しています。
■ 運行シーケンスとセンサやギャップの位置の検討
説明は前後しますが、運行シーケンスを下の表に示すように考えました。 右上のコーナー ⇒ 左下のコーナー ⇒ 左上のコーナー ⇒ 右下のコーナー をそれぞれ8の字型に巡行するパターンです。 この時に必要な給電ヶ所とポイントの操作、および走行状態を検知して反応するセンサを整理しました。
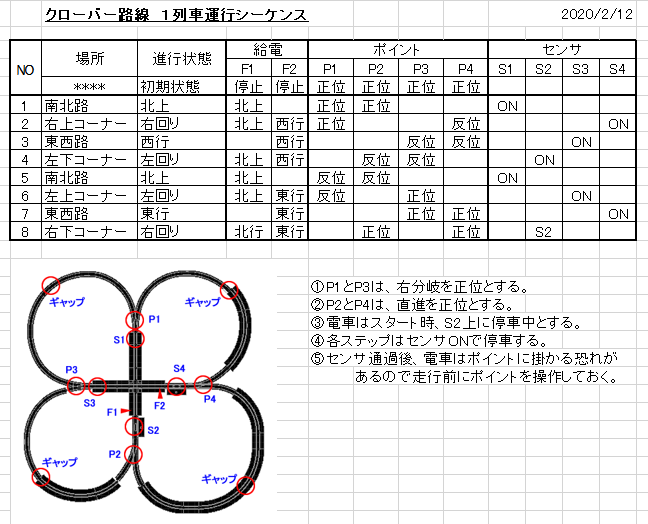
これらの状態を勘案し、センサとギャップの位置をパターン図のように設定して、レイアウトを組みました。
■ 制御回路とプログラム
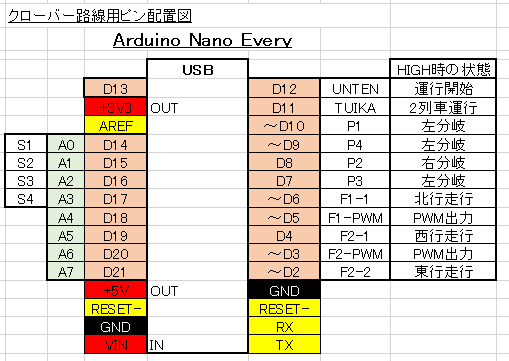
先回から使用し始めた Arduino Nano Every を使用して電気回路を設定しました。 使用した機器類は同じなので説明を省略しますが、Every のポート配置は下記のように設定しました。
 .
.
南北路線は、北行き方向した運行しないので給電のON/OFF(F1-1) とPWM 制御だけを実施しています。 東西路線は両方向走行するので(F2-1)と(F2-2)を設けています。
運行スケッチ ⇒ Every-3A.html
交差点の手前と通り過ぎた後でも停車させていましたが、あまりにも チョコチョコ停車 する状態だったので、手前だけ停車するように設定を変更しました。 試運転の状態をしてに示す。


当初は、減速時間を加速時間と同じ長さに設定していましたが、センサを感知してから停車するまでに時間が掛かって、交差点まで進入する場合があったため、減速時間を短くなるように変更しました。


この時の動画を紹介します。

■ 2編成運行のための検討
ここまで順調に進んで来たので、またまた、欲を出して2編成運行のための検討を始めました。 しかし、ここから運が尽きてしまい、泥沼に入り込んでいまだに抜け出せなくなっています。
まず、上記の走行状態を眺めながら、どのようにしたら2編成の電車を走行させる事が可能なのか、ぼんやりと考えていました。 まず、全体の運行パターンが
- 上記の様な8の字を描く運行パターン
- 各コーナーを順番に走行する順次運行パターン
があることに気が付きました。 第2のパターンでは南北路線では、南下する走行状態もある点が異なっていました。
また、コーナー部の走行距離が短いため、二つの電車はどうしても中央の交差点でクロスするようになります。 この時、早く交差点に着いた電車は他方が停車するまで停車させ、どちらkの電車が交差点を通過後に発車させれば良いと考えました。 早い者勝ちのルールで運行すると、シーケンスがクシャクシャになってしまう恐れがあると考えていたからです。 そして、どちらの電車を先発させるのが良いのかを検討してみました。
どちらでも良さそうですが、試しに2台の電車を離して走行させると、やはり問題が発生しました。 例えば、
- 後を追ってくる電車がセンサを検知して停車すると、先行する電車まで止まってしまう。
- コーナーから帰ってくる電車とコーナーに出て行く電車がポイント上でガッチンコしてしまう。
 .
.
この様な現象を避けるためには、ギャップの位置を変更する必要があることが分かりました。 減速、停止、加速を制御する路線は、交差点を含む直線部分に限定するようにし、コーナー部は以前と同じように非制御区間にする必要がありました。 これによって、先行する電車への影響を少なくすることが出来ます。
ポイント部でのガッチンコが発生する状態を検討した結果、走行パターンが先行する電車を先に通過させると、あるポイントでこの様な場合が発生することを突き止めました。 そこで、交差点を通過させるルールとして、走行パターンを後追いする電車を先に通過させ、その後、先行する電車を通過させるようにすれば、二つの電車は常に後追いの状態で走行している状態となり、ポイント上でのガッチンコ発生を避ける事が分りました。
■ 思わぬトラブルに遭遇
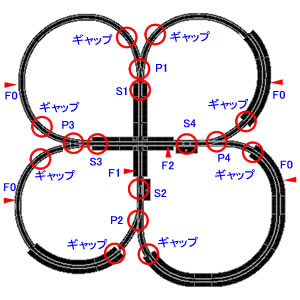
まず、ギャップの位置を変更して、レイアウトを整備しました。 キャップの位置と新しく設置した給電ポイント F0 の位置を右のイラストに示します。
そして、中央部の路線も路面電車用の軌道として手を入れてみました。






電気配線は、コントローラから分岐させた非制御給電を、曲線部の4ヶ所に直接給電させました。
● トラブルの始まり
早速、試運転として電車を走らせると、上記の運行シーケンスNo.6 に入るとこで、コントローラの電源ランプが赤色を点灯して、停止してしまいました。 左上曲線部のフィーダー線の接続を間違えたのかと考えて、フィーダー線を外して走行させても赤色を点灯しました。 この部分は給電を停止しているので、停車はするものの、過電流検知の赤色を点灯することは無いはずです。
プログラムの記述を見直したり、配線を再チェックしましたが、状況は同じで、そのうち、制御区間での走行がモタモタするようになり、何か変な匂いがして来ましたので、ドライバを焼いてしまったと判断しました。 サーモ温度計で測定すると30℃近くもありました。
モータドライバを他の新品に変えてもダメでした。 出力部の配線を外してテストしてみました。 そして、運行開始スイッチを入れただけでも赤色点灯するようになりましたので、テスターを持ち出して、ドライバーの給電側の端子の抵抗を測定してみました。
- EveryをOFF ⇒ 抵抗は無限大(当然ですね)
- EveryをON、運行開始スイッチOFF ⇒ 抵抗は35MΩ
- EveryをON、運行開始スイッチON ⇒ 抵抗は26KΩ
12volt ÷ 26KΩ = 0.5mA これだけの電流でコントローラのランプが点灯するの? 全く解せません。
そして、あれこれいじっているうちに、コントローラ自身の電源が入らくなってしまいました。 コントローラまで壊してしまったのかと真っ青になってしまいました。 1時間程休止した後、コントローラは正常に緑色を点灯するようになりましたので、ひと安心です。 やはり市販品は、フェースセーフ対策がしっかりと施されている事を実感しました。
でも、トラブルの原因が全く解りません。
- 切替時のサージ電圧に反応するのだろうか? ドライバセットのコンデンサを取ったのが間違いなのか?
- 2個目のドライバーもイカレタのか? それならプログラムが悪いのか? 何故レイアウトを少し変更しただけでこのようになったのか?
- 使用した TB6612を使用した2チャネルモータドライバ(秋月製 K-11219)の出力電流は、定格で 1.2A 、ピーク時は2A とあり、安心して使用していたが、安全度の余裕が無かったのだろうか?
- PWM制御されたコントローラをモータドライバの電源として使用する事自体が間違いだったのだろうか?
- 今まで順調であったのが、ここに来た破綻したのは何故なのだろうか?
電気の素人が気楽に組んだ回路とプログラムが、思わぬドル沼に入り込んでしまいました。
*******************************************************************
■ 対応策
とにかく、このままでは前に進まないので、次のような手を講じることにしました。
- 1)容量の大きなモータドライバを使用する
- 手持ちのドライバが無くなったので、新しいドライバを入手することにする。 しかし、以前使用したことのあるTA7291F は既に生産中止となったおり、秋月では取り扱っていなかった。 このドライバは給電側の電源と制御側の電源が別になっているため、使い易かったのだが・・・。 これに代わるドライバを探したが、見つからなかったので、制御と給電電源が共通しているTB6643KQ を使ってみよう。 大きな電流でもびくともしないようであるが、これによって、給電電源としてコントローラが使えなくなってしまうのだが・・・・・・・・。
- 2)過電流防止のためポリスイッチを使用する
- 間違えて使用しても、ドライバが焼けないようにポリスイッチを使用する。
- 3)コントローラが使えないとするとArduino で速度制御をすることになる
- この方法は、一般的な使用方法であるが、問題はPWMの周波数なのである。 TOMIXのコントローラのように、耳に聞こえないようにするためには、 20KHz 程度の周波数を使用する必要があるのだが、その方法とは? Arduino での裏技があるようであるが自分には大きな壁があるのである・・・・・・・・。 当面は我慢することになるのかな。
さて、発注している部品の到着を待とう!
2020/2/19 作成