
HOME >> 鉄道模型実験室 > 補助動力車 カニ24 の追加実験
鉄道模型実験室 補助動力車 カニ24 の追加実験
● はじめに
先回報告した「TOMIX カニ24-100形 補助動力車の調査」に於いて、動力特性の測定結果に疑問点が残っていた。 それは、牽引力・速度特性の中で、高速側と中央状態での特性形状が異なっており、 高速側はS字形状であり、中央状態では一直線状である。 何故だろうと考えてしまうが、さらに再調査が必要があると判断し、宿題として残っていた。 今回、その追加実験を実施したので報告する。
● 追加実験の内容
牽引力・速度特性においては、供給電圧は特性を速度軸に平行に移動させるパラメータとして作用するものと決めて掛っていたが、今回の疑問点は平行移動だけでなくその形も変化すると言う事を示していると判断し、初心に帰って電圧をパラメータにして測定することにした。
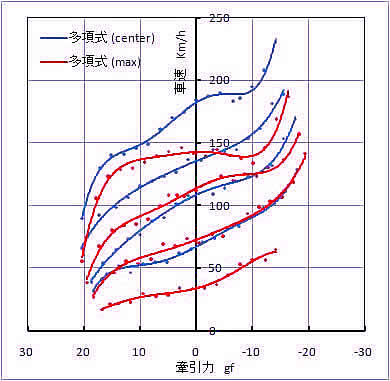
まず、調整ボリュームを高速側のmax状態にして、電圧をパラメータにして測定した。
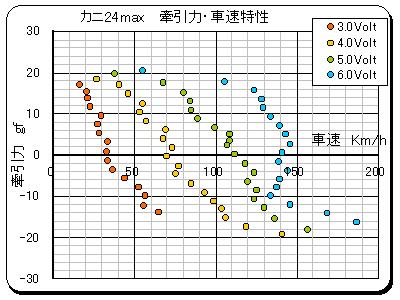
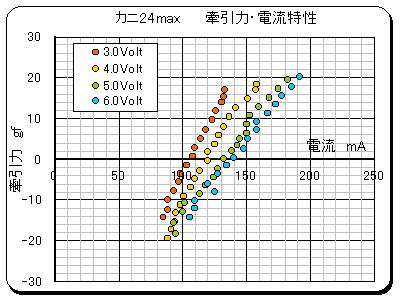
まず、牽引力・速度特性において、電圧を 3.0 、4.0 、5.0 Volt と 順調に平行移動しているが、6.0 Volt になってからその形状が歪んできている。 この 6.0 Volt のデータを 先回の測定データと比較すると、その形状は一緒と判断出来る。 すこし細かく見ると、粘着領域の牽引力は今回高めに出ている事、電流値もやや高くなっていることなどが指摘できるが、まあ、こんなものだろうと思っています。 気温や湿度、レールや車輪の汚れ具合、そしてその日の車両のご機嫌具合など、特性をバラつかせるいろいろな影響要素が考えられますし、測定方法にもそれ程自身は無いし・・・・・・・・。
鉄道模型は、いわゆる “精密機器” では無いと思っている。 細かい細工など精巧には出来ているが、動きの正確さや特性の安定性、信頼性など、時計などのような精密機械とは言い難いし、ユーザーもそれを望んではいないと思っている。 スムースに動けば速度が多少狂っていても何ら問題は無いのである。
この形状の変化は、速度が上がることによってギヤ回りの負荷や挙動が変化してくるのではないだろうかと考えている。
次に条件を変えて測定してみよう。 調整ボリュームを高速側のmax状態から90度戻した状態にして、電圧をパラメータにして測定した。
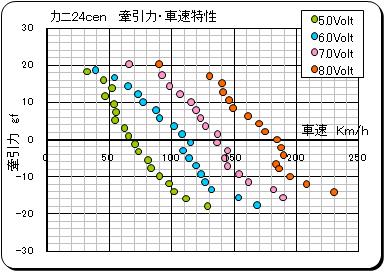
モータと直列に挿入されている可変抵抗値が少し大きくなったので、車両の走行速度がダウンしている。 このため、5Volt から測定を開始した。 高速になると形が崩れて来ているのが判る。 前の測定グラフと比較しようとしても、いまいちはっきりしないので、少し工夫することにした。
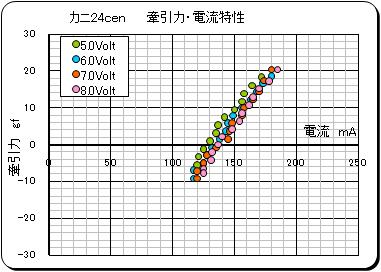
データのプロット点をEXCELを使って近似曲線で描いてみる事にした。
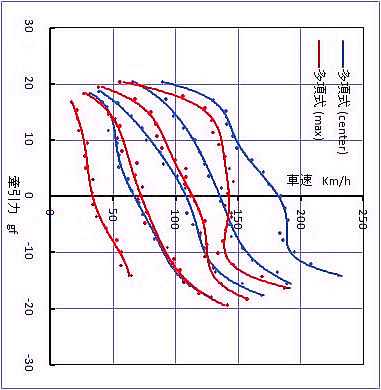
EXCELのグラフ作成機能を使って近似曲線を描くためには座標軸を変更する必要があったが、そのグラフが上の左のグラフである。 近似式は5次の多項式を選定した。プロット点を程良くトレースしていると判断出来る。 赤線が高速側のmax状態、青線がそれから90度戻した状態である。 このグラフを何時も見慣れているグラフ座標に戻すために、画像そのものを90度右回転させたものが、上の右のグラフである。
調整ボリュームが異なっているにも関わらず、スケール速度が 120Km/h ぐらいまでは整った、かつ揃っている線図を示しているが、それ以上になると歪んできているのが判る。 max状態の6Volt と 90度戻しの7Volt 状態では、速度が同程度なのにパターンが異なっている。 パターンの歪みが速度要因だけではなさそうである。
● 重り車両の有無による違い
. .
.
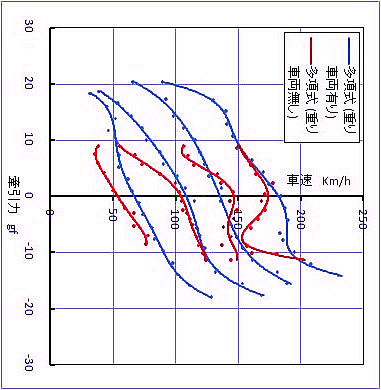
これらの測定は、85グラムの重り車両を連結して測定しているので、もしかしてその重り車両が影響しているかも知れないと思い、 重り車両の使用の有り無しでも比較してみる事にした。
その測定結果をグラフにしたのが、右のグラフである。 調整ボリュームは90度戻しの状態であるので、青線は上のデータと同じである。 この状態で、重り車両を使用せず、車両自身の重さ(70グラム)の勾配抵抗のみの負荷を与えて測定したのが赤線の線図である。
この状態では、走行車両(供試車両+重り車両)の重量が異なるので、同じ負荷を与えるにも、試験台の傾斜が2倍以上も異なることになる。 このため、重り車両を使用していない場合は粘着領域までも負荷を掛ける事が出来ていない。 しかし、基本的には、線図はピッタリと重なって欲しいのであるが、一部分は重なっているところがあるものの、高速領域ではかなりずれてしまっている。
その結論を出すにはデータ不足であるが、制動状態での高速走行は、不安定状態にあるのではないだろうか?
● ギヤ部の回転数
この様なパターンの乱れは、ウォームギヤ部が原因していると睨んでいるので、この状態をイメージするために、回転数を計算しておくことにした。
動力台車を分解して、歯車の歯数を数えた。 動輪のギヤは、 歯数が11枚 、 ウォームホイールは段付き歯車になっているが、どちらも歯数は16枚であった。 ウォームは1条であるので、ギヤ比は、11となる。 即ち、動輪1回転につき、ウォームホイールは、11/16 = 0.6875 回転し、ウォームは11回転する必要がある。
動輪の直径は、5.7 mm である。 スケールスピードが 150Km/h の場合、1/150 の模型では 278 mm/sec の早さで走っている事になる。 従って、動輪の回転数は、線路と車輪が滑っていないと仮定すると、278mm/5.7πmm = 15.53 回転/sec = 932 rpm となる。 そして、ウォームホイールは、640 rpm 、ウォームは10,252 rpm となる。
一般的な機械の回転数からみれば、動輪やウォームホイールは、いわゆる “低速回転” の領域と判断し、ウォームは1万回転もしているので “高速回転” の領域と考える事ができる。
一般的な機械の回転数を考えるとき、自動車のエンジンを想定するのが良いであろう。 特にタコメータが付いているので回転数の実感が湧く。 アイドリング状態では、500 〜 1000 rpm であり、通常走行では、1000 〜 3000 rpm である。 10,000 rpm はもうレッドゾーンである。
小さな鉄道模型で、かつプラスチック歯車の分野ではこの様な判断が出来るかどうか分からないが、そんなに特殊な状態では無いと言えそうである。 さらに、カニ24として見れば、スケールスピードを 150Km/h を超えて走らせることは無いであろう。 通常はこの半分のスピードで走らせていると思う。
● まとめ
牽引力・速度特性に於いて、その特性パターンは電圧変化によって平行移動することは正しいが、高速領域や制動領域ではパターンが崩れる場合がある。 その理由はまだ不明であるが、ギヤ部の駆動状態が不安定になっているものと思われる。
この様な現象があるものの、走行状態は非常にスムースであり、走行音も静かで何ら問題の無い車両と言えよう。
ただ、少し気にするならば、この補助動力車としての機能を考えるとき、本努機との速度調整だけで本当にスムースに重連走行出来るのだろうかと疑問点が湧いて来てしまう。 S字パターンが発生する領域があるので、その領域での重連走行の場合には、相手車両とのマッチングによってはギクシャク走行が発生する可能性は無きにしもあらずと思われる。 その証拠は今のところ無いので、今後は注意して運転を楽しんで見る事にしよう。