
HOME >> 鉄道模型実験室 > ギヤドモータ HPCB の負荷特性を測る
鉄道模型実験室 No.281 ギヤドモータ HPCB の負荷特性を測る
リアルタイムモニタの新しい方法として、Excel の Data Streamer を使ってみました。測定対象はPololu製の75:1シャフト付き超小型メタルギヤドモータHPCB型です。逆起電力定数と無負荷特性を測定したので、今回は負荷特性を測定しましたしました。
■ 負荷特性の測定方法
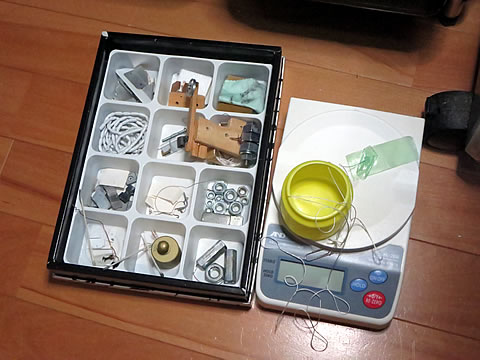
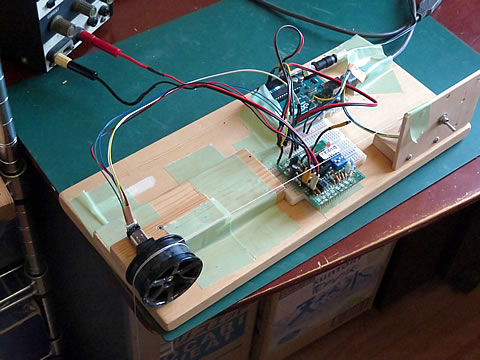
測定対象はPololu製の75:1シャフト付き超小型メタルギヤドモータHPCB型です。このモータに先回紹介したようにモータの出力軸に六角ホイールアダプタを使って四駆用のホイールを直接取り付けています。下左の写真です。ホイールはタイヤ部分を取り外してリムだけの状態にし、溝部の突起をヤスリで削り、ペーパで磨いて綺麗にしています。この溝部に糸を巻き付けて、その摩擦トルクを負荷とする一般的で簡単なモータトルク測定方法です。 巻き付けた糸の先に重りを入れる籠を取り付けています。


その籠の中には、色々な錘を用意して測定ごとにその重りを秤で測定しておきます。秤は0.1グラムまで測定できる卓上に秤です。

データ処理部は下の写真にしめすように先回と同じです。ホイールの巻き付けた糸の他の端はテープで固定しています。
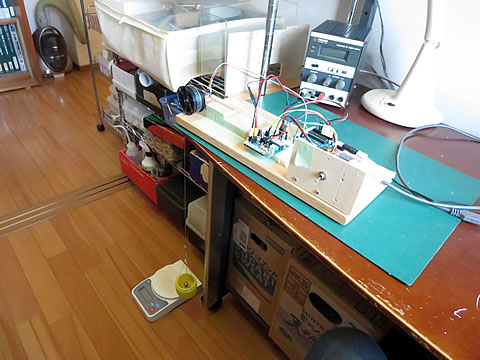
データの測定と記録方法も先回と同じで、パソコンに設定したExcel の Data Streamer を使って記録していきます。
測定手順は、
- 重りを測り、籠の中に入れて、籠をつるします。
- Arduino のUSBをパソコンに接続し、スタンバイ状態にしておきます。
- パソコンのExcel に、Data Streamer の設定を実施しておき、 スタンバイ状態にします。
- 安定化電源のスイッチを入れて、モータを回転させます。
- 測定開始のスイッチを入れ、測定データがData Streamer に入力されているのを確認して、電源電圧をゆっくりと変化させます。
- ひと通りの測定が終了すると、重りの条件を変えて測定を実施します。
のように実施します。
■ 解析の実施
測定されたデータは、何回かに分けて実施しましたので、データをコピーしてひとつのファイルのまとめました。Data Streamerのシートは使いにくいので新しいファイルのとしています・
● データをまとめる
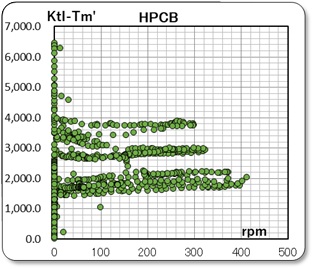
全てのデータをまとめてグラフにしました。最初に、定番としていた回転数とトルク、および電流とトルクのグラフです。
何時の見慣れたグラフですが、今回は様子が全然異なっています。従来は供給電圧を一定にして、負荷を変化させた特性を表示するのですが。今回は負荷を一定にして電圧を変化させているので、当然と言えば当然の結果ですね。
モータの特性を説明している多くのグラフでは、横軸をトルクにして表示していますので、自分のグラフもそうしてきました。このときの回転数とトルク特性は、右下がりの直線になり、電流とトルクの特性は右上がりの直線となります。・・・・・・・・・・・・でも、今回は様子が違ってしまいました。 例として、「小型DCモータの調査 ConnモータRF146W」(2026/1/14)を参照して下さい。
● 特性の解析
先に測定した逆起電力定数と無負荷特性を活用して、これらのデータを解析していきましょう。すでに得られている特性値は、
- 逆起電力定数: Ke = 0.01282 volt/rpm
- トルク定数: Kt = 12467 gf-mm/A ( これは、Kt = 9.740×100000×Ke として計算している。)
- 無負荷時の電流・電圧特性: 電流 = 9.2109×電圧 + 84.33 mA/volt
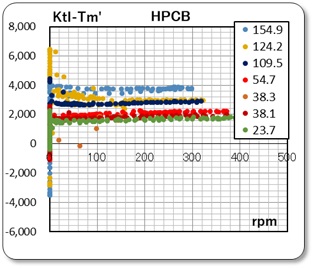
ですので この値を使用して KtI-Tm' と E-KeN を計算してグラフに表示させました。
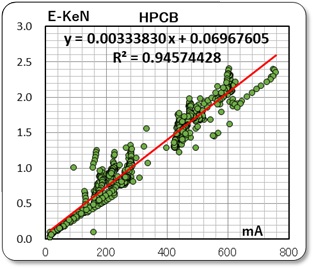
ムムム・・・・・・・・! 今までの経験によると、どちらのグラフも右上がりの直線状に並ぶはずなのですが、左のグラフは何か致命的な欠陥があるようです。このグラフからは速度に対する損失項が示されるはずなのですが、これはモータと言うよりも、どこか測定方法に不具合があると思われます。また、右のグラフからは、その勾配より巻線抵抗値が求められるのですが、データのバラツキが大きいようです。
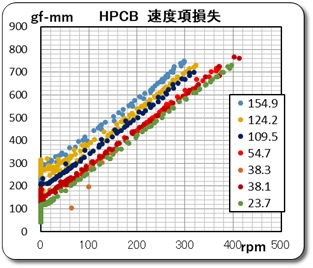
ちなみに、先例に倣って、上記の無負荷時の電流・電圧特性を使用して、摩擦損失の内容を速度項とトルク項に分けて表示下のが下のグラフです。その差算出方法は、「小型DCモータの調査 ConnモータRF146W」(2026/1/14)を参照ください。
 .
.
こちらも疑問だらけです!
● 解析の工夫
このまま、データを眺めていても拉致があかないので、右のデータに注目しました。即ち、データの中には、モータが回転していない時も含まれているので、このデータが影響しているのではないかと考えました。
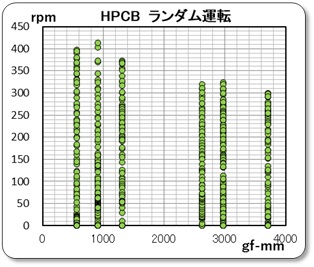
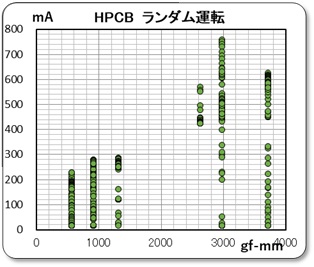
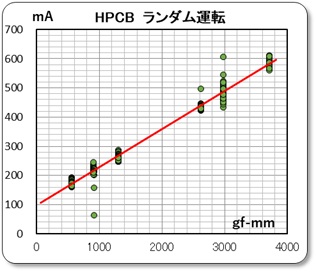
そこで、ゼロ回転および、低回転のデータを除いたデータのみで表示させてみました。低回転は、まだ定常状態に無いと判断して除外としました。全データを回転数の大きい順番に並べなおし、必要な範囲だけを表示させたものです。その結果を下左と中央のグラフに示します。
結果は予想どうりであり、ランダム運転の場合は右上がりの特徴を明示していることが分かります。そして、E-KeN 特性のバラツキも小さくなっています。二つのグラフのデータ数はおよそ500個もありますので、はとんど固まっていると考えても良いと思います。
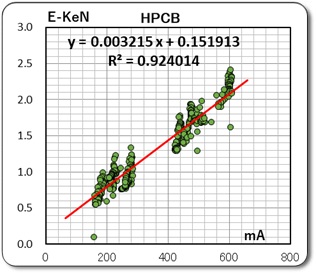
このE-KeN 特性の近似式は、y = 0.003215x + 0.151913 となり単位はvoltです。そしてこの値より巻線抵抗とブラシ部電圧降下値が求められます。
- 巻線抵抗 R = 3.22 Ω
- ブラシ部電圧降下 Eb = 0.15 volt
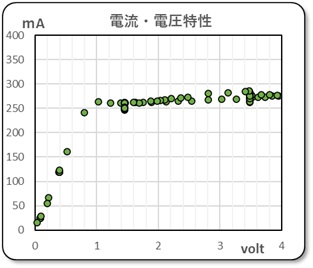
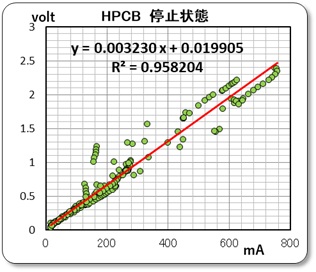
ちなみに、削除したデータについても上右のグラフに示します。停止時、あるいはごく低速時の状態ですので、逆起電力が殆ど発生していない状態です。即ち電流と電圧はオームの法則に従うとみて、その勾配より巻線抵抗を計算してみました。すると、3.23Ωとなり、両方の値はピタリと一致していますね。フムフム・・・・・!
● 摩擦損失データの疑問
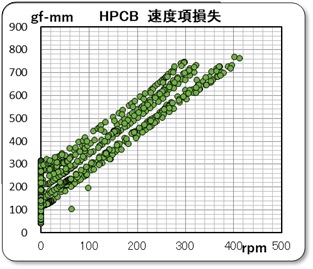
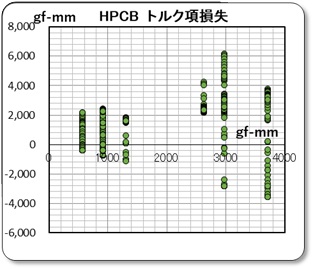
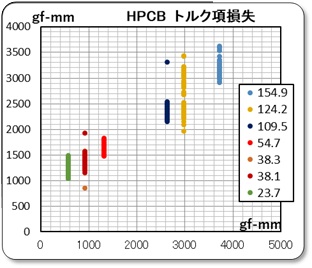
次に、トルク系データの疑問について深堀してみました。トルク系のデータである上記の KtI-Tm' グラフを眺めていて、データが横一線に階層構造になっている点に注目しました。これらの階層は負荷としての重りで層別されるのではないかと睨んで、グラフ表示を工夫してみました。その結果を下に示します。
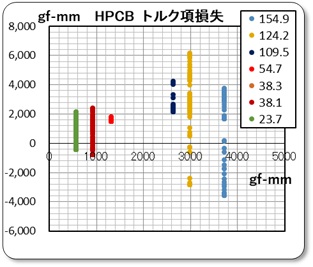
狙いどうりのグラフが得られました。特に右端のグラフに注目です。トルク項損失は出力トルクに比例しているように見えました。このデータもモータ停止や低速時の状態も含んでいるので、これらのデータを削除したデータとして再表示しました。
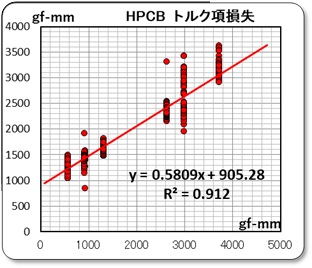
やっぱりですね。今回の測定方法では出力トルクに応じて大きな摩擦トルクが発生していることが分かります。
原因はすぐにピント来ました。負荷の与え方がまずかったのです。出力軸に取り付けたドラムに重りをぶら下げて負荷を与えたのですが、重りの荷重がモータ軸のラジアル荷重として作用し、軸受部にコジレ力を発生しているものと思われます。これによって摩擦負荷が荷重に応じて増加したものと判断しました。
今までの測定では、ジョイントを使って回転力だけを伝達するように配慮して来たため、このような問題は発生しなかったはずです。原因を確定させるためには従来の方法で実験するのが確かですが、面倒なので止めにします。
 .
.
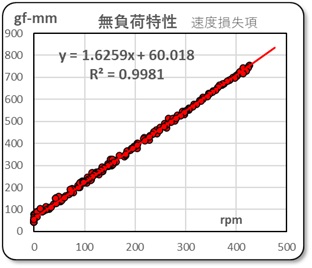
そして、摩擦損失項としては、無負荷時の摩擦損失式で代用して誤魔化すことにしました。ラジアル荷重がゼロの場合である無負荷時の電流値にトルク定数を掛けてトルク値としたものを摩擦損失として、軸摩擦損失係数λm と軸摩擦トルク Rm とすることにしました。軸出力としては出てこない内部摩擦ですね。その式としては、
y = 1.8259x + 60.0
となりますから。
- 軸摩擦損失係数: λm = 1.626 gf-mm/rpm
- 軸摩擦トルク: Rm = 60.0 gf-mm
となります。
■ 測定結果のまとめ
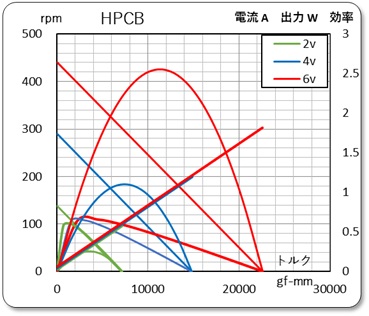
測定にてえられた特性値をもとにグラフとして表示させました。
 .
.
公開されていたデータとして比較して、トルクの値がかなりズレていましたが、回転数や電流値のあたいはほぼ合っていました。
トルクについてはラジアル荷重による損失分が影響したと考えていますので、今回の測定結果は失敗データとすることにします。でも、面倒なので再挑戦は実施しません。
********************************************
今回の報告にて、ギヤドモータの特性測定は完了とします。そして、得られた知見として、
- ロータリエンコーダの使い方を勉強した。特に直交エンコーダも使ってみた。
- Excel の Data Streamer を使ってみたが、使い難いことも分かった。特に自分が多用している計算処理とグラウ化をテンプレートにした方法が使えないのが弱点であると考えている。Python を使った直接書込み方式の方が便利である。今後は、使用用途によって使い分ける事にしよう。
- 回転軸に糸を巻きつけ、重りをぶら下げて測定する方法も、簡単ではあるが課題もあることが分かった。
*********************************************************
次回のテーマは、まだ未定です。
2026/2/14