
HOME >> 鉄道模型実験室 > 直交ロータリエンコーダを作る
鉄道模型実験室 No.284 直交ロータリエンコーダを作る
改善工作の第1弾として、直交ロータリエンコーダを作った。これは、距離測定の分解能を上げる手段としてギヤによる増速ではなく、先回理解した直交エンコーダの技法を取り入れることによって、分解能の向上を実施した。
■ 直交ロータリエンコーダのセンサ
先回の「ロータリエンコーダを使ってみた その1」(2026/2/8)にて報告したように、直交エンコーダと言われている4倍方式の処理方法を理解したので、この方法にて距離測定の分解能を4倍に上げようとするものである。
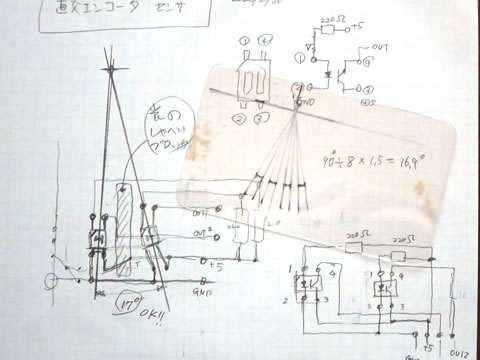
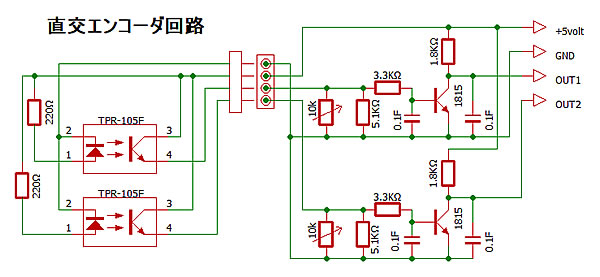
使用する回転円盤は、先回も使用したパソコンで作った32分割の白黒模様の円盤です。通常は、この円盤が1回転すると、32 回パルスをカウントするのですが、このカウントを4倍して、128回カウントさせようとするのです。原理は、フォトリフレクタTPR-105F をもう一つ増設して、A相とB相の二つのパルスをもとに、回転方向の判別と共に、分解能も4倍となる方法です。二つのパルスは位相が90度ずれているので “直交” 方式と言うそうですが、これが制御のポイントとなのですが・・・・・・・・・・。
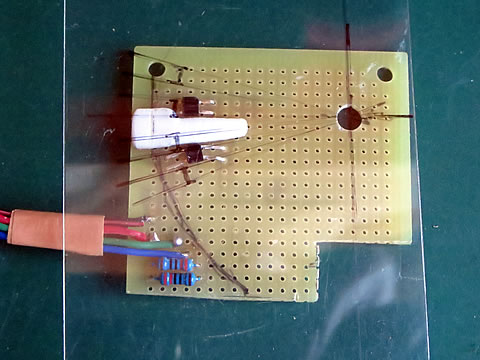
まず、ストック品の中から丁度良い大きさのユニバーサル基盤の切れ端を選び、この上にセンサと回路を取り付けることにしました。
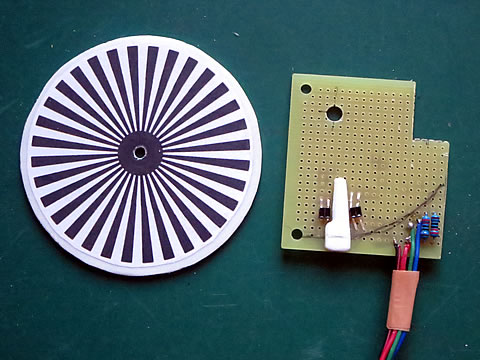
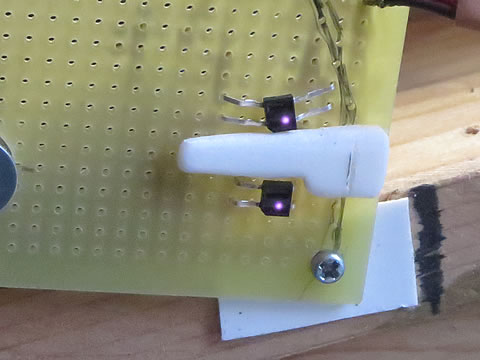
ここで、フォトリフレクタの脚が長いことを利用して、後から横位置をずらして調整できるようにしました。リフレクタの取付角度が重要であると考えていたからです。
リード線を少なくするために、光源の電流制限用抵抗 220Ωは回路中に取り付けており、リード線は電源用と出力線の4本だけにしました。二つのセンサの間は、光の干渉を避けるために土手を後から追加したのですが効果は不明です。最終的に乱反射防止のために黒塗りにしようと考えています。
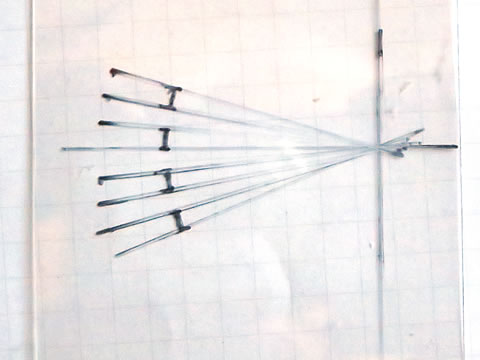
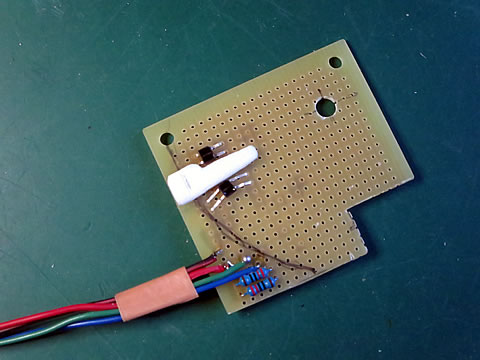
センサの取付位置が重要ですので、透明なプラ板にマジックで線を引き、それに従って取付状態を調整しました。でも写真に示すように、なかなか雑な工作ですが、最終的にはセンサの出力信号を見ながら微調整すれば良いと考えていたので、気楽に工作しています。
■ 処理回路
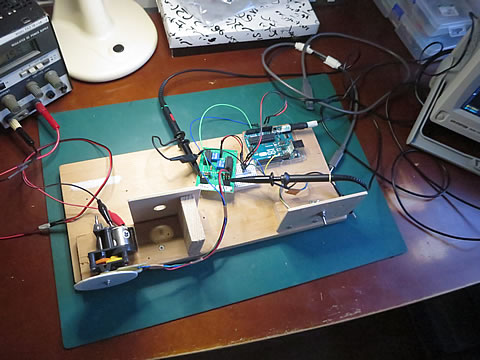
処理回路は、以前工作した回路を使用することにしました。下左の写真です。回転円盤とセンサをモータ付き減速機に取付て、円盤を回転させながらセンサの信号をチェックすることにしました。
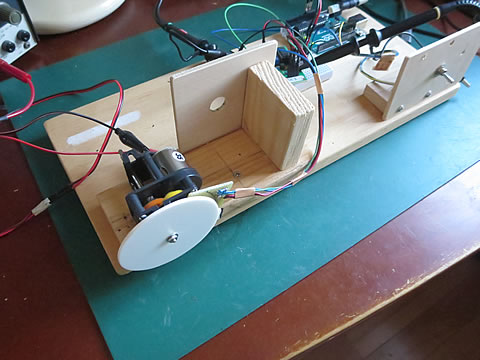
センサ回路の電源はArduino から供給し、信号出力をオシロスコープで観察しました。
 .
.
**********************************
ここで、トラブル発生です。信号が出ていません!
**********************************
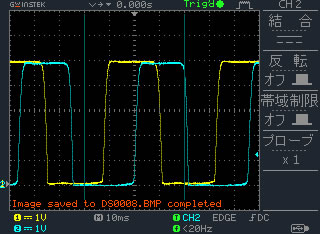
回路の信号を探っていると、センサからの信号は下のオシロ画面のような状態でした。OKですね。
入力信号は正常ですが、出力側はダンマリなのです。そして、使用した処理回路が不良であると早とちりして、新しく作ってしまいました。下左の写真。これならOK のはずと思いきや、やはりこれも駄目でした。
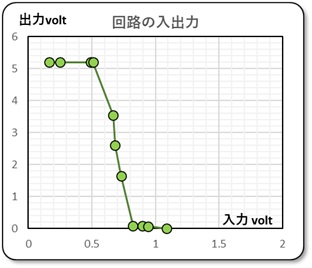
そこで、トランジスタ回路の解説書を見直してみました。入力信号のレベル調整が出来ていないことに気が付いたのでした。試しに、回路の入力と出力の電圧状態を測定してみました。電源は5volt のACアダプタを使用し、入力側の電圧は、4.7kΩの抵抗と10kΩの半固定抵抗を使って調整可能な電圧回路としました。
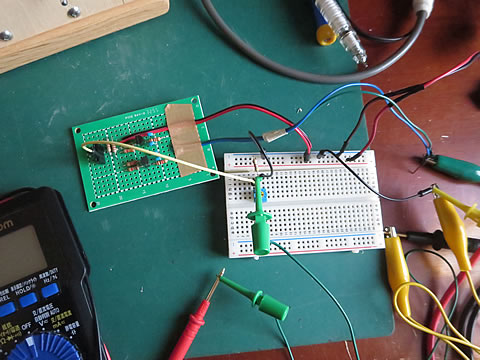
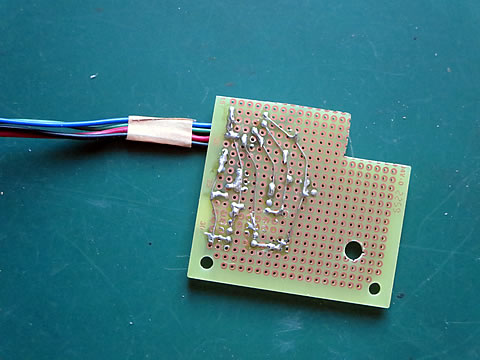
実験で得られた回路の入力電圧と出力電圧の関係を下左のグラフに示します。処理回路は正常に機能している事が分かり、入力電圧の調整が不完全であったことが判明しました。そこで、トランジスタのベース回路に、同じ10kΩの半固定抵抗を追加して、調整可能な回路に修正しました。
 .
.
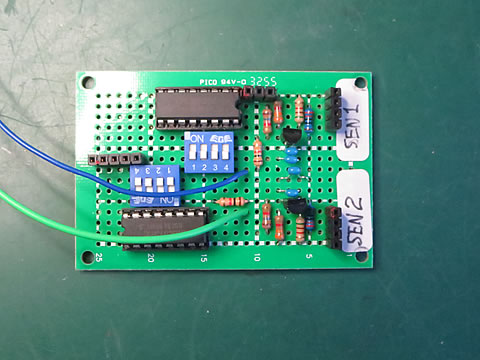
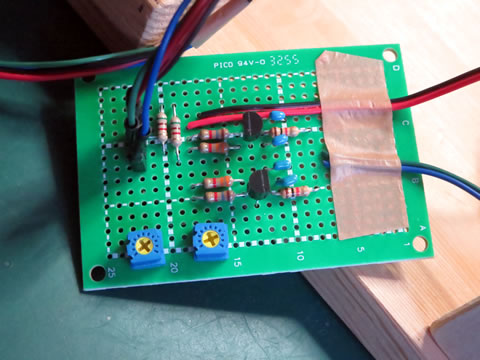
回路を追加した基盤を下左に示します。

 .
.
***********************************************************
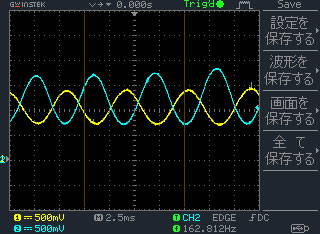
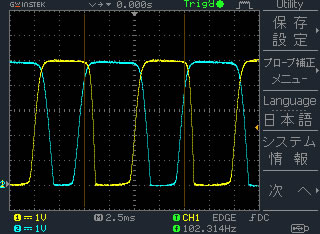
今度は、右のようなパルス波形が出ているのを確認できました。
**********************************************************
完全なパルス波形とは言えませんが、賢明なArduino は充分に判断してくれると思います。そして、ヤレヤレと思いながら、しばらくボート眺めていましたが、ここで、重大なミスに気が付きました。
二つのパルスの位相のずれが、180°・・・・・・! これって〝対交エンコーダ”?
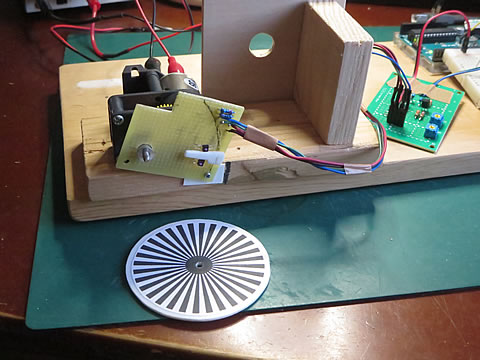
そうなのだ、直交エンコーダにするには、位相ズレは90°なのである。そこで、円盤を取り外し、センサの位置をマイナスドライバーを使って外側にずらしました。再度組付け後、オシロでの波形確認を何度も実施して微調整を実施しました。
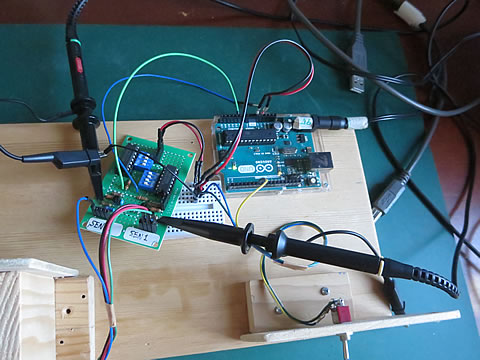
編集時に気が付きました。センサの赤外線LEDが光っている状態を写真はとらえています。カメラは赤外線に反応するのだ。
さらに、センサの位相調整とは別に、半固定抵抗の調整によって、パルスの立ち上り位置とパルス幅を調整しました。その様子を下に示します。
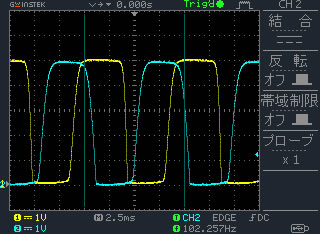
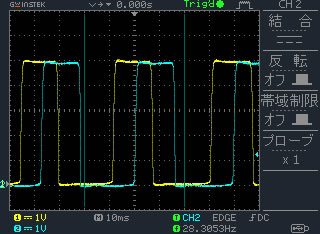
左の画面の状態では波形が少しなまっており、位相位置も不良の状態です。右の画面が最終調整状態です。立上りと立下りのタイミングが均一ではないのですが、パルスをカウントするには充分であると判断しました。
■ まとめ
今回も、直交エンコーダを作るにあたっていろいろな知見を得ることが出来ました。
- 直交エンコーダはパルスの立上りと立下りのタイミングをカウントするので、白黒マーキングの幅は均等にする必要がある。
- フォトリフレクタの取付位置の微調整が可能な構成にしておくこと。
- フォトリフレクタの出力処理回路では、パルス幅の微調整が可能な回路をしておくこと。
- 微調整にはオシロスコープを使って波形を確認しながら実施する必要があること。
*********************************************************
次回の報告は、装置の改善として、慣性体の工作です。
2026/2/25