
鉄道模型実験室 No.296 実験装置の改善
引出し特性という現象を観察しているが、実験装置の摩擦トルクの低減と回転ムラの改善に取り組みました。その改善効果を確認するために、テスト走行を実施した。
■ 改善した装置のテストの様子
実施したテスト走行の様子を右に示す。電源は、いつもの菊水製の安定化電源を使用し、計測ユニットから送信されてきたデータはパソコンにて記録します。 プログラム等は先回と同じものを使用しました。走行させてモデルは、EF81-119号機です。
 .
.
● ランプ応答による観察
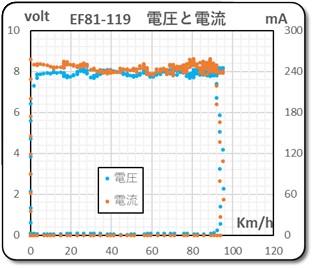
最初に、電圧をゆっくり上昇させて負荷抵抗と車速の関係を調査しました。
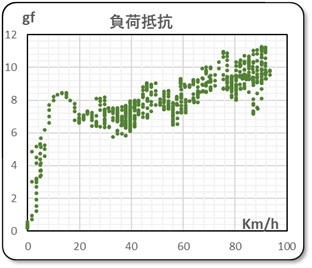
この時の負荷抵抗の値を車速を横軸にして整理したものを左のグラフに示します。
動き始めは少しギクシャクしていましたが、20Km/h を過ぎたあたりから安定した走行となり、徐々に速度を上げた様子が分かります。そして、その時の負荷抵抗値は車速とともに増加しているのが観察されます。
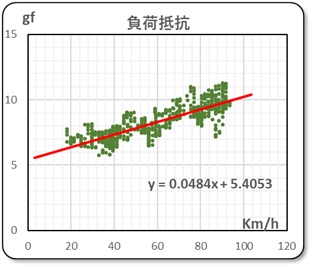
動き始めの20Km/h 以下のデータをカットして直線近似した様子を右側のグラフに示します。このデータが負荷抵抗と速度の関係を綺麗に示していると考えて良いでしょう。
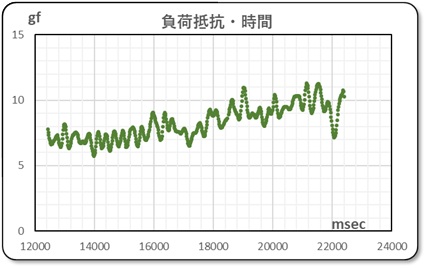
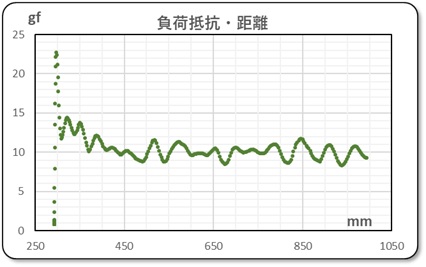
次に、回転ムラをチェックするために、このデータを時間と距離のデータを横軸に取って整理してみました。
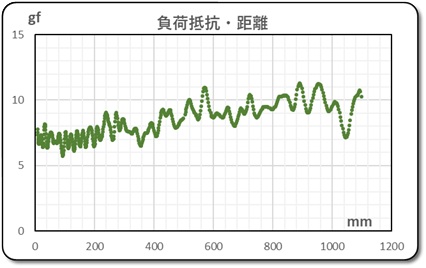
波の幅は2〜3グラムと小さくなっていることが分かります。でも、波の幅が一定していません。糸の進み量は、ロータリエンコーダ部での1回転では 55mm であり、慣性円盤部での1回転では 151mm です。後半は 55mm の幅で波打っているのでエンコーダ部の回転ムラが影響しているようです。
しかし、慣性円盤部での回転ムラは影響ないように見えますし、走り出し部の細かい波はよく分かりません、もしやと思って時間軸をとってみました(上右のグラフ)。6.5山/2sec = 3.25Hzの波の様です・・・・・…よく分かりません!。影響する要因はいろいろ考えられますが、原因究明は難しそうです。
参考: 過渡応答での実験で何が分かるのかは、「発進停止特性を測定する」(2014/3/7)を参照してください。
● 電圧によるステップ応答の観察
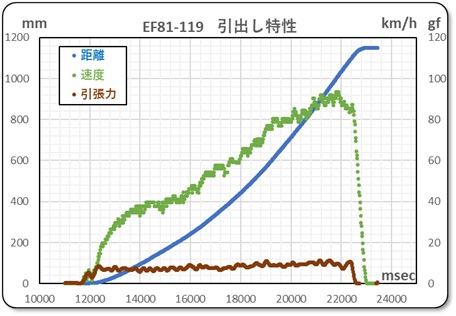
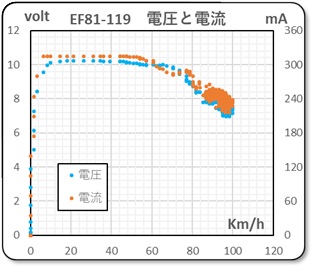
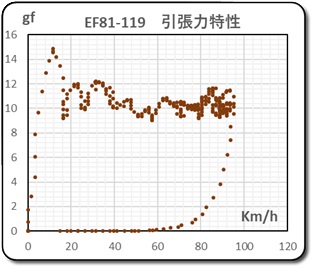
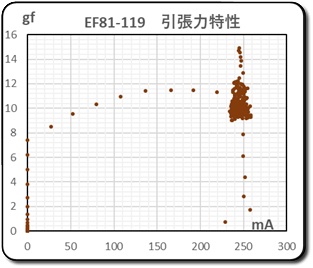
つぎに、電圧によるステップ応答(インディシャル応答)による車速とその時の引張力を観察しました。電圧を 10volt に、電流を最大近くに設定して、ヨーイドンの走行を実施しました。
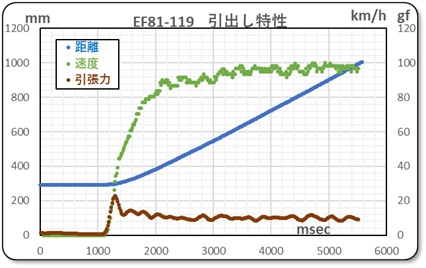
スタート後、1秒も経たないうちにスケール速度 80Km/h に達し、そこからじわじわと速度を速めています。引張力・車速の関係もグラフにしてみました。
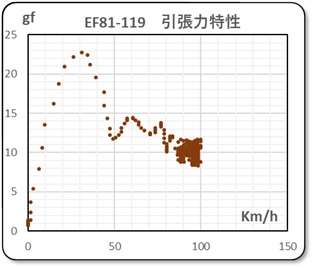
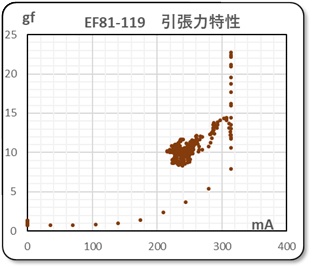
この車両の最大引張力は 30 グラム以上あるので、余裕シャクシャクで加速している様子が伺えます。また、電流値データの 300mA 越えはこのシールドの測定限界です。
********************
即ち、慣性負荷としては物足りないことを示しています。これは、覚悟していた事なので、今後の改善点としましょう。
また、速度が一定状態での負荷の波打ちを見るため、ランプ応答時と同様なグラフにしたのが右のグラフです。約 50mm サイクルの波うちですので、エンコーダ部の回転ムラと思われます。
● 電流によるステップ応答の観察
次に、電流によるステップ応答を観察してみました。電流を250mAに設定してヨーイドンの走行を実施しました。この時のグラフを下に示します。

電圧制御の場合と比べて加速具合は弱いようです。同様にして、引張力・車速の関係もグラフにしてみました。
 .
.
ウム・・・・・・・・・・・・?何だか微妙に違うようですが、よく分かりません!。
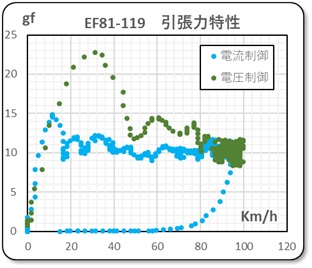
そこで、電圧制御の場合と電流制御の場合を比較するため、右のように二つのデータをまとめてみました。同じように見えていても、ハッキリと違いが分かります。
電流制御では、加速中と言えども引張力はほぼ一定値を保っています。
このEF81-119号機の静的特性は、「EF81 119 一般色」(2025/10/14追記)に示しています。その静特性のデータと見比べるのですが、よく分かりません。引張力が10グラム程度と言うことは、このモデルの取って余裕シャクシャクの値なのです。後期高齢者の頭の中では整理できていません。
■ まとめ
今回のテスト走行によって、
- 摩擦抵抗の値の低減と回転ムラの減少は、かなり改善出来たので、今回の工作は成功と言えるでしょう。
- これ以上の改善は、工作の精度を上げる必要があると思われるので、自分の工作技能を考えて見合わせる事にします。
- 電圧制御と電流制御の違いなど、なんだか面白そうなので、この点に注目してもう少し遊んでみることにします。
- 当初の目的であった慣性抵抗と引出し特性については、慣性能率をもっと大きくする必要があることが分かりましたので、少しトライを実施してみることにします。
さて、次回は何から手を付けようかと考え中です。
2026/4/4