
HOME >> 鉄道模型実験室 > パワーユニットを知ろう KATOのスタンダードS
鉄道模型実験室 No.128 パワーユニットを知ろう KATOのスタンダードS
 .
.
■ はじめに
先回の 「XBeeを搭載したドクターカー その4 内回り線を測定する」 にて報告したように、パワーユニットの違いによってデータの様子が大きく異なっていることに驚いた。 これは、電源となるパワーユニットの出力形態が異なるためと考えているので、その様子を調べることにした。
そのための道具としてオシロスコープが必須であるが、今年の自分へのお年玉として思い切って購入した。 右の写真。 テクシオ・テクノロジー 製のデジタルオシロスコープ GDS-1052-U である。
さっそく操作方法を勉強しながら使ってみたが、色々な機能とそのためのボタンが多数あり、当面はウロウロしながらの測定となるのも仕方がない事だ。
まず最初に、一番気になったKATO製のパワーユニットから調査しよう。
■ パワーユニットの出力波形を測定する
まず、測定方法を説明する。 パワーユニット(KATO ではパワーパックと呼んでいる)には、何らかの負荷を接続した状態での測定が必要と考えて、動力車に使用されていたモータを用意した。 そのモータは、 動力車の調査 > モータの特性調査 > の「KATO製電気機関車 第3期 フライホイール型モデルのモータ 追加」で報告した「ジャンク品2」を使用した。 50周年記念誌によると GM - 5 タイプに該当するモータである。 なお、今回は無負荷状態で回転させるため、負荷系はセットしていない。
セットした測定状態を下に示す。 電圧測定部は、今後の展開を想定してTOMIXの線路を介して接続している。 こうすると色々なパワーユニットが同じ条件で測定できのである。 KATOのパワーユニットから線路に電力を供給するフィーダー線は、TOMIX のDCフィーダーN (5537)を使用しているが、このフィーダー線のコネクタ部はKATOコネクタに取り換えている。 これは以前に工作していたものである。 ただし、プラスとマイナス線を間違えてハンダ付けしていたので、この線を使用するときは要注意である。
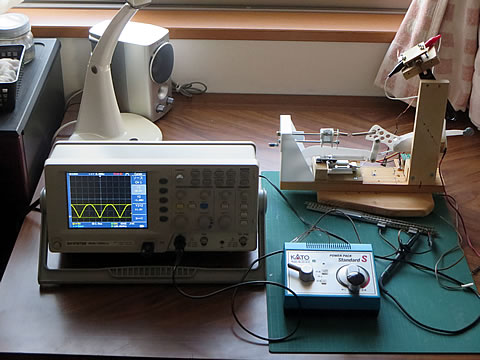

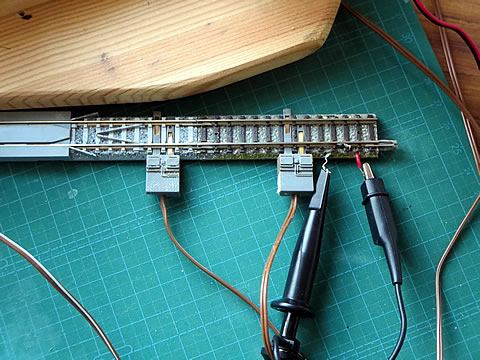
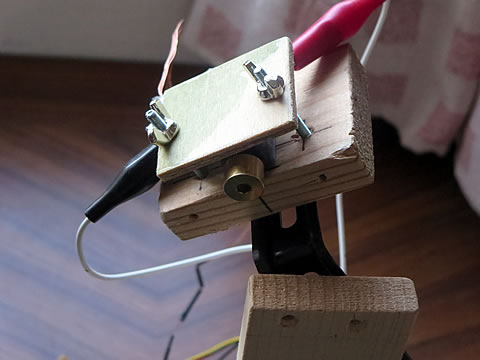
そして、線路上に電圧測定用プローブを接続できるようにリード線をハンダ付けしている。 さらにDCフィーダーN を使ってモータの端子まで接続している。 そして、モータの負荷状態を変えて測定する場合には、「モータの無負荷回転特性を測定する」で使用したシールドを使用できるようにしている。
■ KATO製のパワーパック Standsrd S の出力波形
パワーパックの操作ダイヤルの位置をおおよの3ヶ所に設定して、その時の出力電圧の波形をオシロで観察した。 オシロ画面は、カーソルによる電圧測定状態を示す Cursor モードと、波形の色々なデータを表示する Measure モードの画面をハードコピーして並べて表示する。
| ダイヤル位置: 9時 | 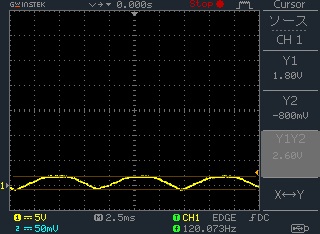 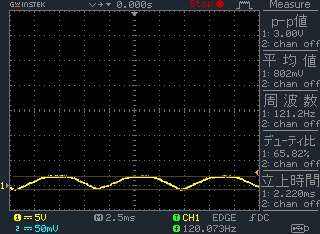 |
|
|---|---|---|
モータ接続なし: 上のピーク値: 1.8 volt 下のピーク値: -0..8 volt 平均値: 0..8 volt 周波数: 121 Hz 波形は脈動波形である。 |
||
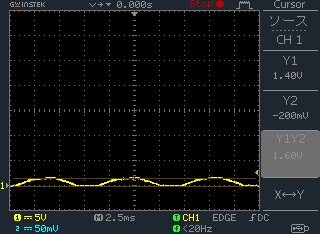
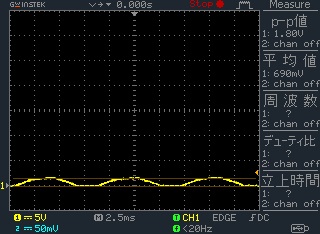
モータ接続: 上のピーク値: 1.4 volt 下のピーク値: -0..2 volt 平均値: 0..7 volt に変化する。 モータに電流が流れたためか。 |
  |
|
| ダイヤル位置: 12時 | 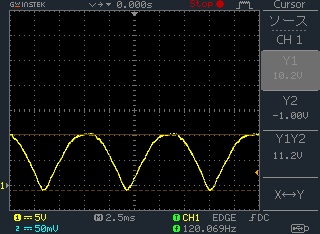 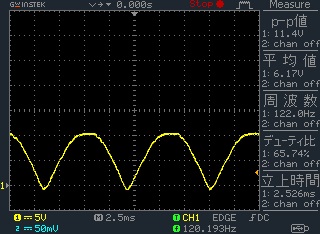 |
|
モータ接続なし: 上のピーク値: 10.2 volt 下のピーク値: -1.0 volt 平均値: 6.2 volt 周波数: 122 Hz 脈動波形がだんだん大きくなって来た。 |
||
モータ接続: 上のピーク値: 9.0 volt 下のピーク値: 5.0 volt 平均値: 7.12 volt に変化する。 下側が底上げしているのはなぜだろうか? これによって平均値がアップしている。 また、大きなノイズが多数乗っているがモータのノイズと思われる。 |
  |
|
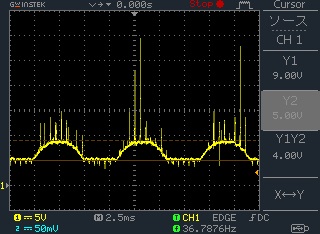
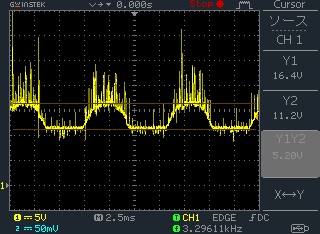
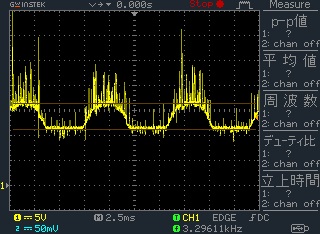
| ダイヤル位置: 3時 | 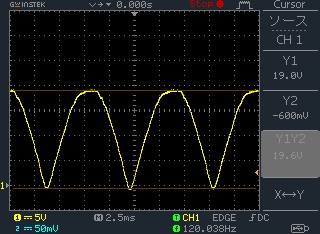 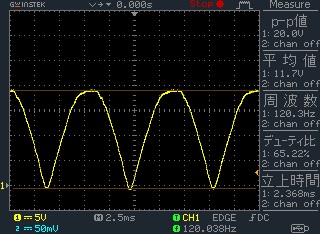 |
|
モータ接続なし: 上のピーク値: 19.0 volt 下のピーク値: -0.6 volt 平均値: 11.7 volt 周波数: 120 Hz 脈動成分が大きい。 これは交流を整流しただけで、平滑回路が挿入されていない状態である。 |
||
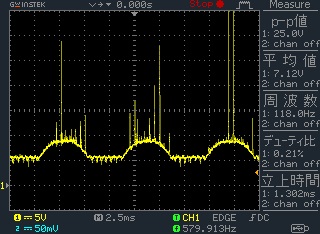
モータ接続: 上のピーク値: 16.4 volt 下のピーク値: 11.2 volt 平均値: ? volt に変化する。 下側がさらに底上げしている。 大きなノイズが多数乗っているがモータの回転数が上昇したため、そのサイクルが早くなっている。 |
  |
|
やはり、交流を整流したままで、平滑処理がされていない波形であった。 全波整流のために 120Hz の脈動となっている。 ここで気になる点について調べてみた。
● モータを接続した場合の底上げについて
不思議に思ってネットを調べていると、同じ現象を説明しているサイトが有ったので紹介しよう。
⇒ 日本電産株式会社のホームページの中の、 2-1-3 DCモータの回転速度と逆起電力の「モータの発電作用を見る」に記述されています。
モータが回転している時に発生する逆起電力によって電圧が底上げされていると理解できます。 そして、回転数が高いほどその電圧が高くなっています。
 .
.
● アダプターを使っているのに何故整流したままの波形なのか
このユニットは、家庭用の100ボルト交流電源から、アダプタを使って電源として取り入れています。 従った、平滑な直流電源とばかり思っていましたので、このオシロ画面を見た時は、ビックリでした。 せいぜい数%程度の脈動成分と思っていたからです。 改めて、ユニットとそのアダプタの仕様ラベルを観察してみました。
- ユニットのラベル:
- インプット側の表記 ⇒ 電源入力 ( AC 15V、1.5A ) アウトプット側の表記 ⇒ DC12V
- アダプターのラベル:
- KATOパワーパック スタンダードS専用電源 AC - AC ADAPTOR NO. SF48 - 1501500AP INPUT: AC100V 50/60Hz OUTPUT: AC 15V 1.5A 22.5VA
と記されていた。 このアダプターはAC - AC アダプターであり、交流の15V がユニットに送り込まれているのである。 知らなかったですね。 それにしてもなんで直流にしなかったのだろうか? 時代が古かったからか? コストが安かったからか? 他の交流モデルのシステムと共用するためだったのか・・・・・・・?
このアダプターの出力端子部で電圧波形を観察した。 端子は開放状態である。
| アダプターの出力端子の電圧波形 | 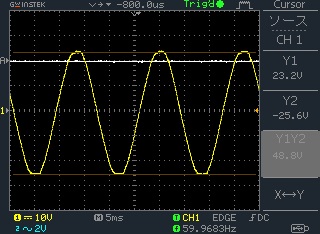 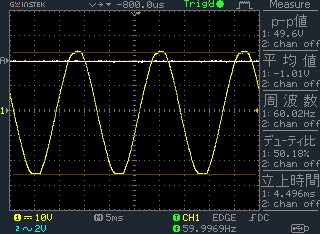 |
|
上のピーク値: 23 volt 下のピーク値: -26 volt 平均値: -1 volt 周波数: 60 Hz 電圧はカーソルを当てて測定しているので曖昧である。 正確にはバランスが取れた値であろう。 |
||
見事な交流波形である。 さらに、交流電圧が測定できるテスターでも測定してみたら、17.85 volt であった。 ラベルに記されていた AC 15V よりも高かったが、さらに交流であるので波のピーク電圧はさらに高いことも改めて認識した。
● モータの極数とは?
先日送付されてきた KATO の 50周年記念誌によると、モータの開発史が記載されていた。 興味深く読ませてもらい、モータのモデル名称も明確になった。 ただ、5極DC とか、3極DC との説明に疑問を感じたので、これまた、ネットで調べてみた。
自分が参考にしている 赤津観先生監修の 「最新モータ技術のすべてがわかる本」・・・ナツメ社 2012年初版発行・・・では多くの図表を使って分かり易く説明されていますが、その中で、直流整流子モータのスロット数と極数について、図解入りで分かり易く説明されていました。 自分も極数とスロット数を混同して使っていましたが、この本を見て、2極5スロットモータ ( 2P5S )とか 2極3スロットモータ ( 2P3S )とかの言い方を使うようにしました。 極数は、北極や南極、あるいはN極S極の様に磁極の数を示し、殆どが対になっていますので偶数で表せられます。 一般的なDCモータは一対の磁石で構成されているの2極モータと言えるでしょう。 一方スロット数は、鉄心に刻まれた溝数のことで、ここに巻線を収めるスペースを示しており、モータがどこからでも始動出来る様に奇数にするそうです。
ネットで3極モータと引いてみると、多くの事例が出来きますので、こちらの用語も使われているようです。 この分野は専門外なので、用語のいきさつや業界での事情が分かりませんが、磁極と巻線スペースを明確に分類している赤津先生の説明の方に賛同することにしました。 この様に重要な用語は、JISで定義されていないのでしょうかね。
■ まとめ
KATO製のパワーパック Standsrd S は、交流アダプター(AC - AC ADAPTOR)を使用して全波整流したままのパワーユニットであることが分かった。 このため、その脈動成分はしっかりと残っていることを認識しておこう。 このため、我がドクターカーとは全く相性が合わないことも納得である。
しかし、これでもNゲージ動力車は快調に走行することは確かであり、運転を楽しむには支障は無いのである。
>
2017/1/8 作成