
HOME >> 鉄道模型実験室 > パワーユニットを知ろう KATOのC56とPWM制御
鉄道模型実験室 No.137 パワーユニットを知ろう KATOのC56とPWM制御
.
■ はじめに
パワーユニットを知ろう の第10弾として、TOMIX製パワーユニットN-1001-CL を使って動力車を走らせた場合の特性を測定することにした。 今までの特性測定は安定化電源を使用していたために、常に安定した直流を流すことが出来る状態でを使用していた。 このために、より純粋な動力特性が得られていた。 しかし、TOMIX製のパワーユニット N 1001-CL などにでは、PWM制御などのチョッパー制御を採用しているため、その変動する電源によって、これまでとは違った状態を呈することが知られているし、モータ状態での実験に於いても我が実験室で確認できた。
そこで、モータが組み込まれた動力車の状態においては、どのようになるのか、その動力特性を実験してみた。
 .
.
■ 実験方法
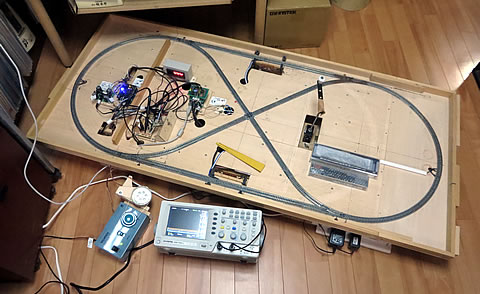
実際の使用状態を再現するため、動力車を8字パターン方式の測定装置を使って走行させてその特性を測定した。 この装置の全体像を右に示す。
供給電源としては、TOMIX製のパワーユニット N 1001-CL そのものを使用するため、測定装置を少し改良する必要があった。 一番の問題は、ユニットのダイヤルの回転具合を如何に取り込むかである。 モータ測定の場合と同様に、可変抵抗を使用すれば良いのであるが動力測定装置の Arduino のアナログ入力端子がすでに満杯なのである。 8字パターンの測定用に改良した時点で、 6チャネルのADコンバータを使い切っているのである。
その対策として、傾斜角センサと共用で使うことにした。 パワーユニットのダイヤル目盛の角度入力を使用する場合は、平坦路走行での速度特性を測定する場合なので、傾斜角センサは使用しないのである。 また、傾斜角センサを使用する場合は、ダイヤルの位置を固定した状態で傾斜角を変えながら牽引力特性を測定する場合なので、ダイヤル目盛の角度入力は必要ないのである。 このように、二つのセンサを同時に使う必要がないので、切り替えながら使用できることに気が付いたのである。
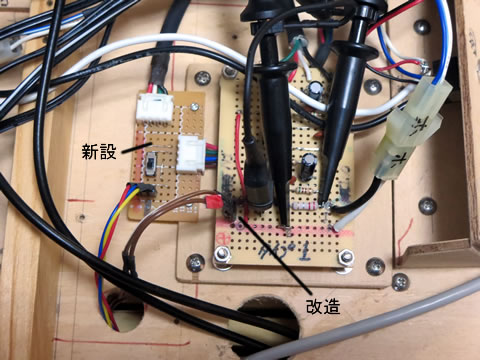
その切り替え回路を追加した状態を次に示す。 さらに、色々な電源も使用できるように入力端子も修正し、ついでにオシロ用プローブの取り付け端子も追加加工した。 パワーユニットのダイヤル回転角を検出する可変抵抗に取り付けたプーリーは、空き瓶の蓋を活用して改良しており、供給線の端子もピンホルダーに加工した。

■ 速度特性の測定結果
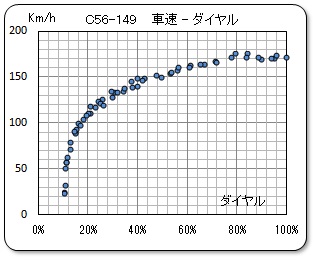
まず、平坦路の単機走行状態で、速度特性を測定した。 パワーユニットのダイヤルの回し具合によって、動力車の速度調整がどのようにコントロールできるかを知るためである。 比較のために、通常のカンモータを搭載しているTOMIX製C57-135号機と、コアレスモータを搭載しているKATO製のC56-149号機を走らせて、PWM制御による速度特性を測定した。 なお、以前の測定データは、C57-135号機とC56-149号機に示しているので参考にされると良いであろう。
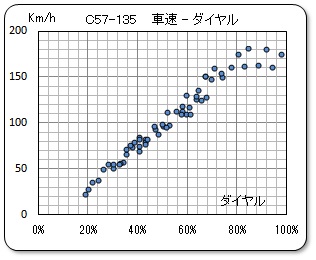
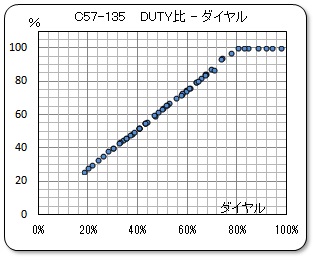
横軸はTOMIX製のパワーユニット N 1001-CL のダイヤルの回転具合で、左いっぱいをゼロとし、右一杯を100とした目盛と考えてください。
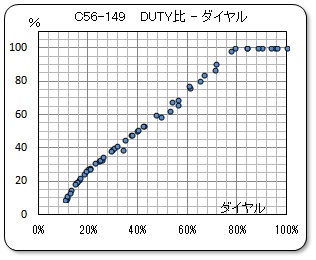
通常モータのC57-135 号機の場合は20%ぐらいの位置から走り出し、80%でいっぱいになるまではほぼ比例的に増加している。 しかし、コアレスモータのC56-149号機の場合は、最初の立ち上がり部分が急激である。 これは可変抵抗のBカーブとCカーブの違いと同じような傾向と言える。
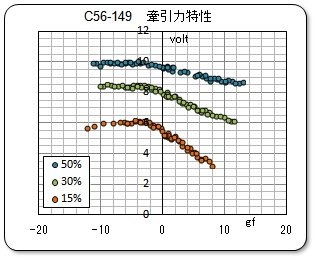
このような特性になる原因を調べるために、PWM制御のDUTY比をオシロ画面より読み取ってグラフ化してみた。
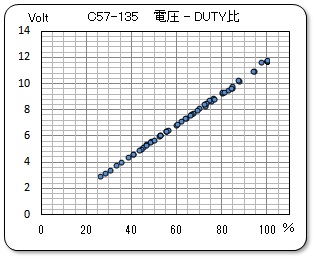
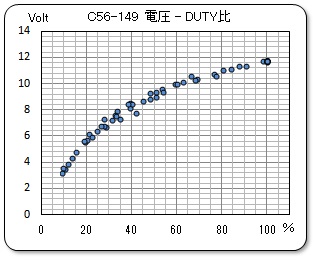
動力特性の要因を考えると、 ダイヤル目盛 ⇒ DUTY比 ⇒ 平均電圧 ⇒ 動力車の速度 の関係で影響していくと考えられるので、この関係が分かるようにグラフ化したものである。 これより、コアレスモータの場合には、DUTY比 によって影響される平均電圧が比例的でないことが原因となっていることが一目瞭然である。
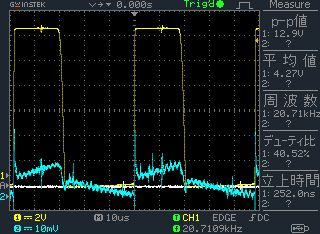
また、電圧と電流波形の違いも、オシロ画面にて提示して置く。 DUTY比 が約40%の場合である。
参考として、電流特性についても記載しておこう。
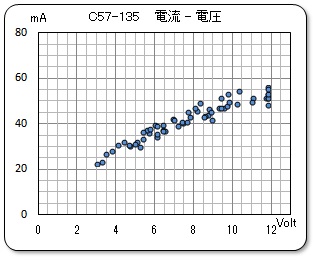
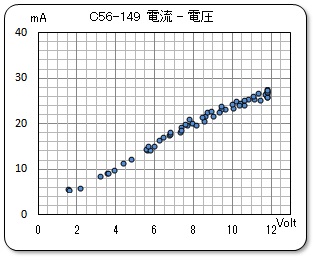
■ 牽引力特性の測定結果
次に、牽引力特性を測定した。 動力車に重り車両を牽引させ測定台を傾斜させて測定を実施した。 測定結果を下に示す。
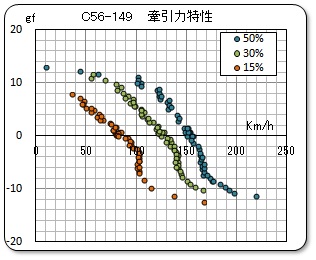
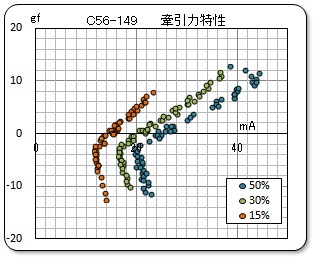
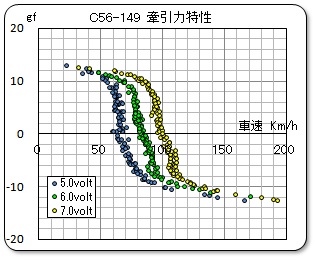
上の左と中央のグラフが今回測定した、牽引力 - 速度、および牽引力 - 電流の特性である。 そして、右のグラフは以前安定化電源にて測定した牽引力 - 速度の特性グラフである。 測定のためのパラメータは、測定上の関係で、以前の測定グラフ(右のグラフ)は供給電圧を一定にして測定しており、今回の測定グラフ(左と中央)はダイヤル位置、即ちDUTY比が一定の状態で測定している。
TOMIX製のパワーユニット N 1001-CL を使用して KATO製のC56-149号機を走らせている場合には、左のグラフに示した特性にて走行させていることになる。 そして、その特徴は、上り坂などで負荷が増加すると速度の落ち込みが大きい ということである。 平坦路を 100 Km/h のスケールスピードで走行させていても、上り坂では 50 Km/h 程度まで減速してしまうということである。 でも、低速になっても止まることはないのだ。
これをパワー不足と言ってしまうには可哀そうである。 安定化電源ではほとんど速度低下も無く登りきるであろう坂道を、PWM制御の故にノロノロ運転を強いられるのである・・・・・・・・!
でも鉄道模型として楽しむ場合には、この方がかえって現実的であり、もっともらしいかも知れない。
がんばれデゴイチ では無くて C56! なんだ坂、こんな坂、・・・・・ とん とん とんと のぼり行く !
*****************************************************************************************
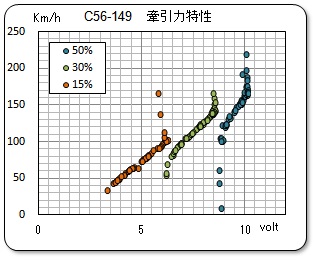
では、何故このような現象になるのだろうか? 次の二つのグラフを見ながら考えて下さい。
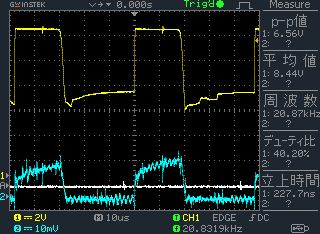
また、DUTY比が約15%の場合の電圧波形と電流波形も記載しておく。
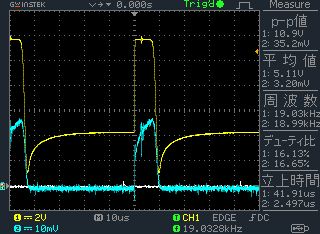
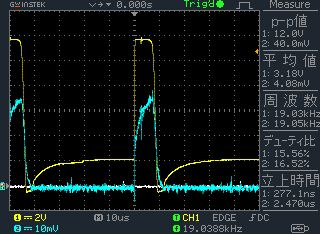
チャンネル1(黄色)には電圧値を、チャンネル2(青色)には電流値を取り込んでいる。 電圧がON になった場合に、電流はどちらもゼロスタートである。 負荷が大きい場合には多くの電流がいるのであるが、そのためにはモータの逆起電圧を下げてコイルに流れる電流を増加さえる必要があるのである。 電流が不足するとトルクが負荷に負けて回転速度が低下するのである。 そして逆起電圧と電流のバランスが取れた状態に落ち着くのだ。 逆起電圧が下がると電圧の平均値が下がるが、電流の平均値はアップするのである。 オシロの波形画面にもその値がはっきりと示されている。
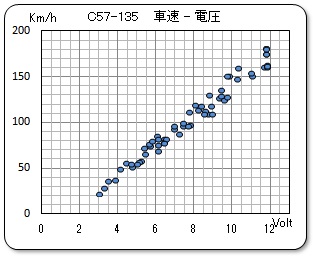
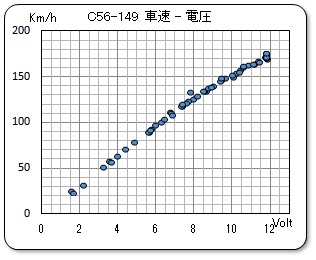
また、電圧と車速の関係グラフは、一直線上に並ぶはずであるが、これがモータ回転数であればそうなるであろうと想定する。 車両となると動輪のスリップ要素が加味されるので、駆動域では速度は低くなり、制動位置では増加するのである。 本当かな?・・・・・・・・!
■ まとめ
PWM制御方式のパワーユニットを使ってコアレスモータを搭載した動力車を走行させる場合、次のような特性がある事を念頭に置いて楽しむことにしよう。
- ダイヤルの回転具合と車速の関係に於いて、最初の立ち上がり部分での変化が大きいこと。
- 上り坂などで負荷が増加すると速度の落ち込みが大きいこと。 ただし、粘り強いのである。
2017/2/17 作成