
鉄道模型実験室 No.170 昇降駆動装置の工作
先回の報告にて、新しい測定台の昇降駆動装置として用いたラジコン用のフルメタルデジタルステアリングサーボではパワー不足であったことを報告した。 そこで、新しいユニットを見つけたので、再チャレンジを実施した。
■ 昇降駆動装置のユニットの調達
 .
.
電動モータを使ったリニアアクチュエータを今回もアマゾンで見つけた。 色々の機器の使われているようであったが、
ブランド名がphalatina]の電動 シリンダ アクチュエータで、推力は 500N 、 DC 12V 仕様のモータを使用し、ストローク長 50mm 80mm 100mm 150mm 200mm などのサイズがあり、農業や産業分野でのリフター、 福祉・介護現場でのリフト、DIY用に便利なユニットであるとの宣伝であった。 ストロークのエンドには自動的に停止機構が付いているとのことであったので、安心して使用出来そうである。
問題は、このリニアアクチュエータの運動を傾斜台の昇降運動にどの様なメカで変換するのか、また、ステップごとにアクチュエータを動かせるかである。 組込むスペースと運動変換機構としてのリンク機構などを、いくつものアイディアを検討した。
また、ホームセンターの金具売り場で、リンク部品と保持部品に使えそうなものを探してジョイント部材や平折部材を調達した。
この部品寸法にに合わせてリンクメカを図面に描き、リニアアクチュエータの仕様を選択した。 推力は 50Kg も必要ないのだが、これ以上小さな仕様のものが無かったので、このシリーズの 80mm ストローク製品をアマゾンに注文した。
 .
.
■ アクチュエータの駆動回路
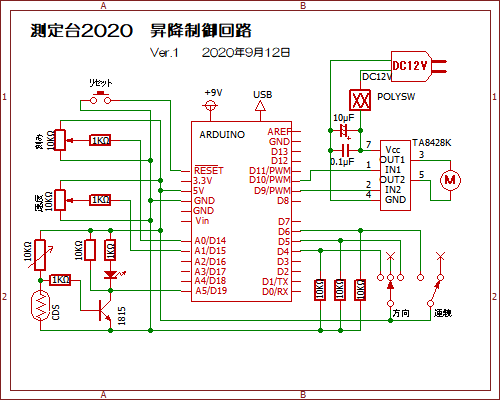
アクチュエータは、12V 1A 定格であったので、その駆動制御は今までの自動運転システムの技術範囲である。 そこで、Arduino UNO を使った昇降制御回路を右の様に構成した。
アクチュエータをモータドライバで駆動し、アップとダウンの駆動をPWM制御で実施する。 作動中の音は問題ないので、PWM周波数はそのままとし、ヂューティ比と作動時間によって、アクチュエータの作動する速さと時間を矩形波的に制御することにした。
周回路を走行する動力車が測定ゲートを通過すると、センサが感知して、アクチュエータを作動させる。 この作動速さと時間をボリュームで変更することによって、傾斜台の昇降・下降具合を調整するのである。
また、上昇か下降かは動力車の粘着限界に達した時点を観察し、スイッチ操作によって手動で変更できるスイッチを設ける。 さらに、作動をセンサ検知によってステップ毎に動かす以外に、連続的に作動させるスイッチも設けている。
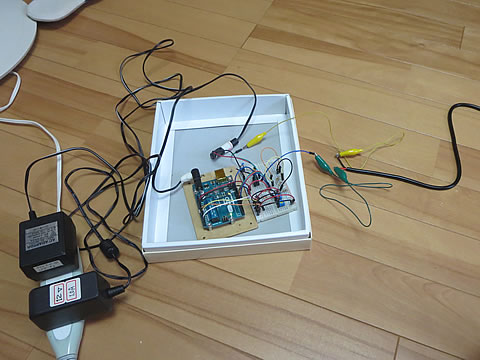
注文したアクチュエータが届く前に、この回路の検証のためにBトレを走らせてスケッチの記述と回路の検証を実施した。 その時の様子を下に示す。 通過センサは押しボタンスイッチで代用した。
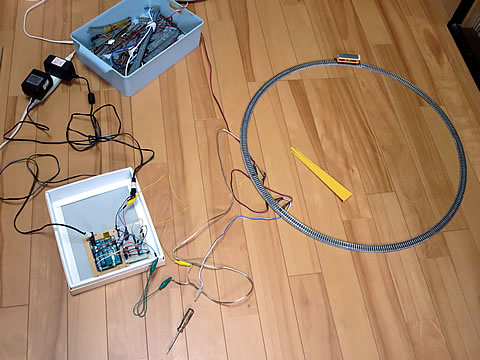
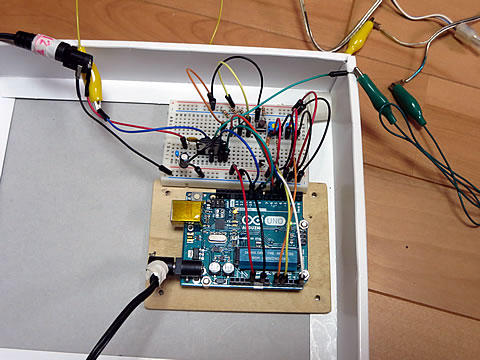
なお、この回路は工作中のアクチュエータを作動させる駆動回路として使用するつもりであったので、事前に用意したのである。
■昇降駆動装置の組立て
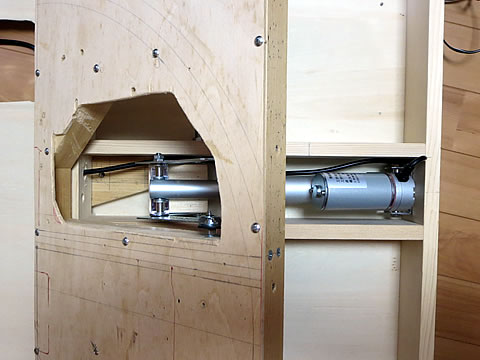
注文していたアクチュエータた届いたので、用意した金具を使ってリンク機構を工作した。 U字形の金具を使ってアクチュエータの支点を保持し、L字型金具を使ってアクチュエータの前後運動を上下運動に変換するリンクメカを構成させた。 下の写真。 アクチュエータの直線作動を受けるレバー長さは、60mm である。 これを上下運動にかえるレバー長さは、103mm であった。 従ってレバー比は 103/60 = 1.72 倍となり、単純計算では 80mm ×1.72 ≒ 137mm の上下ストロークとなるのだが リンクの動きを作図してみると、おおよそ 110mm は得られるはずである。


工作中の作動確認は、臨時の駆動回路を用いて、チョンチョン作動や連続作動を実施て、リンク系の動きをチェックして行った。


最後に金属レバーを使って、フラッパと連結して、リンク機構の完成である。 連結部は本来はピンを使用すべきであるが、M6ネジの軸の部分を使た部分は大丈夫であるが、、M4 ネジそのままを使っている部分もあるので、ネジ山がつぶれてガタとなってしまう恐れもあるが、その時は取り換えれば良いとの安易な考えである。 また、スペースの関係で緩み止めの細工が出来ない箇所もあるので、機構部分の上部の大きな穴を使って、点検出来るようにしている。
また、フラッパが台枠に接地したゼロ状態と、アクチュエータが最短縮した状態とはあえてピタリとは一致させず、リンクのピン部にガタを設けてガタガタの状態で連結させている。 これは、アクチュエータの短縮しようとする力によって、フラッパと台枠間に無理な力が作用するのを防止するためである。 両者のスタート点をピタリと一致させる機構を組込むのはなかなか難しく、あえてガタを設けて逃げるのが得策なのである。 このため、作動開始時に無効な動作が発生するがその影響は無視できる。

フラッパの駆動機構が出来たので、その上に傾斜台を降ろして作動確認を実施した。

この駆動装置の作動状態を動画で紹介する。

これで難題であった、自動昇降機構の目途がたったので、この制御操作盤を作ることにしよう。
2020/9/18 作成