
HOME >> 鉄道模型実験室 > モータドライバとPWM制御 まとめ
鉄道模型実験室 No.193 モータドライバとPWM制御 まとめ
コアレスモータをPWM制御で駆動すると、デューティ比と車速の関係が なぜ非線形になるのか と言う疑問に対し、こだわり屋の実験室長はショットキーバリヤーダイオードを持ち出して実験した。 その結果、いろいろな知見をえることが出来たが、肝心のなぜ非線形になるのかは、結局わかりませんでした。
モータの上流にショットキーバリヤーダイオードを挿入して電流の逆流を止めて見たり、シャント抵抗を使って電流の流れ具合を観察したのですが、電磁気関係の知識の乏しい機械屋の老いぼれには、理解困難な現象ばかりで、厚い壁にぶつかってあきらめざるを得ませんでした。
****************************************************************************************
そこで、これまで得られた知見をまとめて、このプロジェクトを終了とすることにしました。
.
■ 実験装置と観察方法
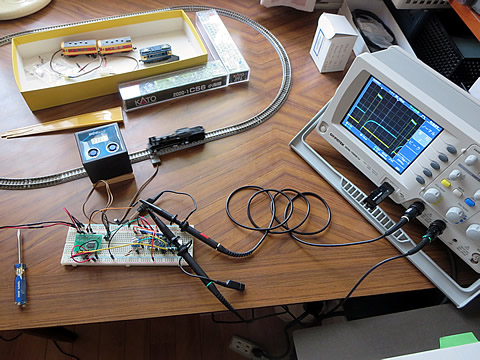
今回実施した実験装置の様子を下に示す。 PWM信号は Arduino Nano Every を使用し、2種類のモータドライバを使って給電用PWM電力を作った。 PWM信号はロータリスイッチのノッチに合わせて、あらかじめデューティ比を決めて出力するようにスケッチを記述している。
動力車は小型のコアレスモータ車として、KATO製のC56、およびチビ凸用動力ユニットを走らせ、ビースピVを使って車速を計測した。 また、ドライバ周りの電圧を取り出してオシロで波形を観察し、画面のハードコピーをもとに解析している。 今回は、その結果を活用出来なかったが、デューティ比がスケッチの指定どうりに出力されているのかの確認に生かされている。
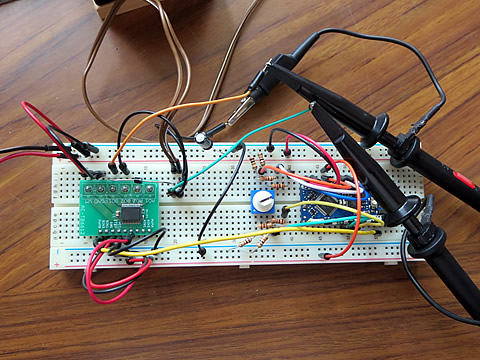
下左の写真は実験装置の全体を示し、下右の写真は、ブレッドボード上に構成した電気回路を示す。
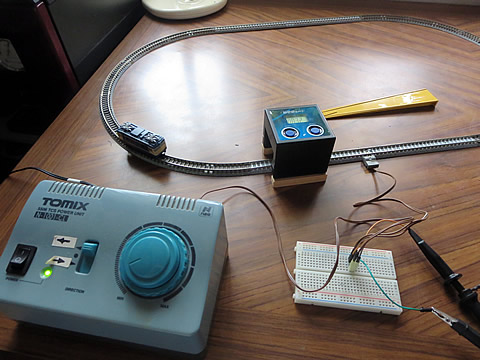
TOMIX製のパワーユニットの場合は、フィーダー線よりオシロ用の信号を取り出し、デューティ比はオシロデータから読み取っている。
 .
.
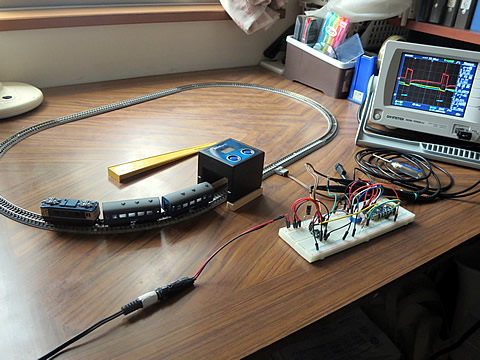
動力車の負荷として、バンダイ製の走行抵抗の大きな台車を履いた客車を連結して負荷とした。 また、昔工作した麦球式の室内灯を取付けていたため、かなりの電流を消費していると思われる。
Arduino Nano Every に書き込んだスケッチを次に示す。
PWMのキャリヤ周波数は 15.7KHz にし、デューティ比は16段階に設定しているが、コアレスモータを対象にしているので、デューティ比の小さい部分は細かく設定した。
■ 観測結果
今回観察した3種類の制御機器と4つのパターンについて一覧表にまとめた。 特に、デューティ比と車速の関係に注目し、その時のパワー制御回路の回路構成を記載しましたので、その関係に注目してください。
| パワーユニットまたはモータドライバ | デューティ比とスケール速度の関係 ブリッジ構成 |
備考 | ||
|---|---|---|---|---|
| TOMIX N-1001-CL |
 |
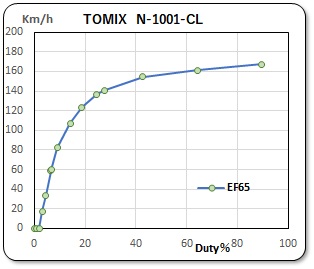 |
デューティ比とスケール速度の関係は非線形である。 負荷に対する変化は未調査。 |
|
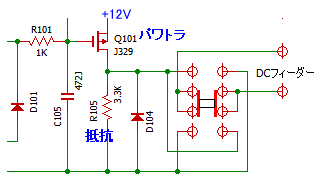 |
ひとつのパワトラでプルダウン構成しとしている。 |
|||
| ROHM製 BD6231 |
 |
制御方法 | 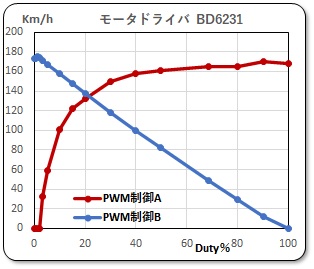 |
デューティ比とスケール速度の関係は、制御Aの方式では非線形であるものの、制御Bではマイナス勾配の線形を示している。 非線形具合はTOMIXと殆んどおなじであるのは何故か? |
制 御 A |
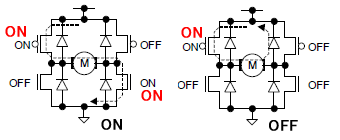 |
フルブリッジ構成であるが、メータアウト(?)制御である。 | ||
制 御 B |
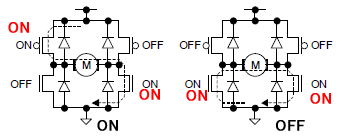 |
フルブリッジ構成であるが、メータイン(?)制御である。 さらに、OFF時に電流回生のために他方のローサイドをオープンさせている。 PWM系は負論理である。 |
||
| 負荷の変化 | 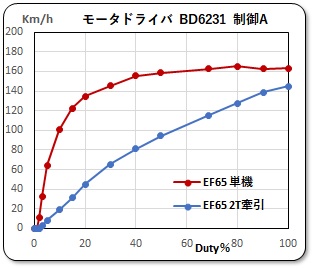 |
制御Aの方式では負荷が大きくなると膨らみが小さくなり、線形に近づいてくる。 | ||
| 東芝製 TB6612 |
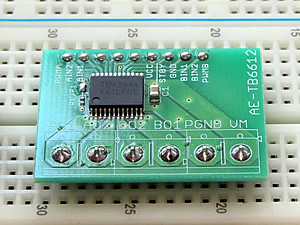 |
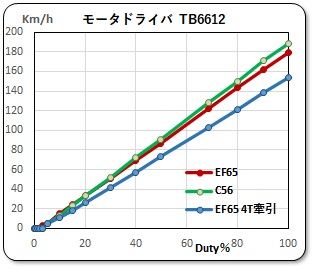 |
デューティ比とスケール速度の関係は綺麗な線形となっている。 また、負荷が増えると勾配が下がって来ている。 小型のSLのC56型とBトレ用のチビ凸用動力ユニットとは、単機走行時の状態で、殆んど差が無い。 |
|
 |
フルブリッジ構成であるが、メータイン(?)制御である。 さらに、OFF時に電流回生のために他方のローサイドをオープンさせている。 |
|||
■ まとめ
今回得られた知見をランダムに記述する。 コアレスモータ動力車を走らせる場合、
- TOMIXのパワーパックでは、、デューティ比と車速は非線形の関係である。 このため、ダイヤルの回転具合と車速の関係も非線形となってしまう。
- 東芝製のモータドライバ TB6612 では線形で制御できる。
- ローム製のモータドライバ BD6231 では、制御Aでは非線形となる。 しかし、制御Bでは線形となるもマイナス勾配である。
- 非線形となる場合でも、負荷が大きくなるとその膨らみは小さくなり、線形に近づく。
- 線形になるか、非線形になるかは、パワーパックやモータドライバの内部回路の構成の違いか、制御方法の違いによるものと推定する。 そして、モータの回生電流の処理の方法が影響しているのではないかと疑っている。
と言えそうである。 そして、コアレスモータ搭載車を走らせる場合は、
- 牽引の負荷となるように、なるべく長い列車編成にしよう。
- モータドライバを使うなら、TB6612を使用すると良い。
- BD6231 を使うなら、制御Bの方法で制御できるが、この時はデューティ比をマイナス勾配で指定すること。
を結論としよう。
コアレスモータ搭載車とPWM制御は、相性が悪いと言われているが、これはコアレスモータの特性を考慮したパワーパックになっていないからである。 自分はPWM制御方式のパワーパックとして、TOMIXのメーカーのN-1001-CL しか持っていません。 このため、コアレスに対応したユニットが有るのかどうかはわかりません。
といって、PWM方式でなく、昔からある電圧制御方式を使用すると、常時12Vを出力していないため、室内灯としてテープ式LEDを装着した車両を走らせることが出来ません。 どちらを取るかの問題となってしまいます・・・・・・・・・・・(>_<) 。
2021/5/28 作成