
HOME >> 鉄道模型工作室 > マイコン式の運転操作台を作ろう コアレスモータ搭載小型SL車のレンジ設定
鉄道模型工作室 マイコン式の運転操作台を作ろう コアレスモータ搭載小型SL車のレンジ設定
卓上レイアウトでも走行を楽しめる小型車両を中心にして、車種レベルの設定のために走行特性を測定した。 コアレスモータ搭載小型SL車の場合を検討し、制御のまとめを実施した。
■ コアレスモータ搭載小型SL車の走行速度の測定
コアレスモータ搭載の小型SL車ようとして、残されている最後のレンジを使って設定することにする。
なお、車種設定用のロータリスイッチで設定する項目について、適切な用語が見つからず、ポジションとか車種別レベルとかの用語を使用してきたが、「Aレンジ」とか「Gレンジ」のようにレンジと言う用語を使用する事にします。 車のシフトレンジという使い方を参考にしました。 ドライブレンジとかリバースレンジとか。
今回は、KATO製のコアレスモータを搭載した小型蒸気機関車C56型と8620型を取り上げました。 先回報告したC12型とは特性が異なっている様子であったため、改めて特性を測定しました。
対象とした車両は、C56型では、144号機と149号機(品番: )の2台、 8620型は28643号機(品番: )の1台を走らせた。


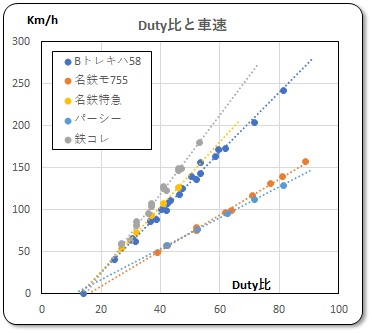
まず、テスト用のスケッチを少し修正して 5% のデューティ比 dt = 5 を追加した。 そして、ビースピVを使って車速を測定した。 C56-144号機、 149号機、28643号機のデータはほとんど同じだったので、これらの3台をひとまとめにして、dt設定値と車速測定値をグラフにした。 下のグラフ参照。
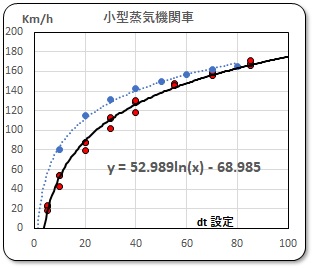
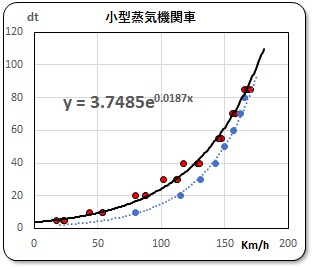
参考として、先回測定したC12などの場合のデータを青いプロット点で示したが、やはり特性は違っています。 dt = 20 のポイントで 80km/h と 110km/h の違いが出ています。 スケッチ上での記述のために、縦軸と横軸を交換して指数関数として近似式を右のグラフより求めた。
 .
.
■ 設定値の検証
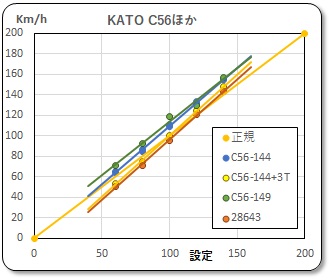
新しくスケッチを修正して、先回と同様に測定した結果を下のグラフに示す。 また、C56-144号機の場合、右の写真の様に室内灯を組込んだBトレ客車を3両牽引させた場合も測定した。
 .
.
この客車はバンダイの台車を履いているので走行抵抗が大きく、3台の牽引が限界であった。 しかし、速度としてはあまり変化が無いようである。 左のグラフ参照。
また、C56型の2両は微調整ダイヤルをゼロにしても完全に停車せず、少し動いてしまうのである。 原因として、速度の計算値 v がゼロであっても、dt 値がゼロにならない事に気が付いた。
e のゼロ乗はゼロでは無くて、1なのである。 従って v = 0 の時でも dt = 3.7485 になって、 C56型は走り出してしまうのである。 そこで、スケッチでの記述を次の様に変更した。
レンジG: dt = 3.7485 * ( pow(2.7183, 0.0187*v) - 1 ) ;
レンジH: dt = 1.3101 * ( pow(2.7183, 0.0244*v) - 1) ;
車速がゼロの場合は指数部が1となるので、マイナス1としてデューティ比をゼロにし、微調整ダイヤルを使って、ゲタを履かせる計算式に変更した。
修正したスケッチ ⇒ Micon-Unteidai-34.html
◆ コアレスモータ搭載車の車種レンジ
先回の結果と合わせてまとめておく。
| 車種レンジ | 対応する車両モデル |
|---|---|
| G | KATO製蒸気機関車 C56型、8620型 |
| H | KATO製蒸気機関車 C12型、 KATO製チビ凸用動力ユニット |
■ 制御のまとめ
これまで、マイコン式運転操作台の制御内容に検討してきたが、ここでまとめておこう。 制御の内容を大まかに示すブロック図として下に示す。
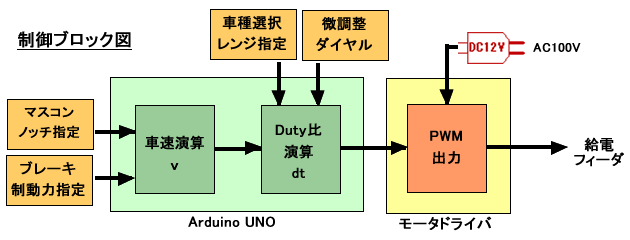
ロジックの内容については今までの説明を参照して頂くとして、メインは現在の車速を演算させるブロックである。 ここで、指定する車速が演算されると、その車速をその時走らせる車両モデルに合わせたPWM制御のデューティ比を計算させ、モータドライバによって実際の 12ボルトのPWM制御電力をフィーダに出力させるのである。
今回、デューティ比を計算させまでを使い馴れた Arduino UNO を使用することによって、容易に対応できることが出来たうえ、出力としてのモータドライバが、ひとつの小さなIOで対応出来ていることに、感無量である。 エー? これでいいの? と言う感じである。
勿論安全面の配慮は殆ど無いので、問題が起きた場合は自己責任であると認識しています。
■ 或る確認事項
以前から気になっていましたことが有りました。 それは、計算されたデューティ比が、PWM制御パルスとして本当にフィーダーから出力されているのだろうか、と言う疑問である。 これは、コアレスモータを検証していたときにわき出した疑問であった。
そこで、すでに測定していたデータからその内容を確認するデータを取り出して検証してみることにした。 コアレスモータの場合はPWM波形が変形してしまっているので出力されている波形をいちいち物差しを当てて読み取っていく必要があるが、モータドライバから出力された波形は、DCモータであろうが、コアレスモータであろうか関係ないはずである。
そこで、DCモータ車の測定時に観察したオシロ波形の画面に示されていたデューティ比のデータと、車速演算から計算された値をデューティ比として計算したであろうと言う値を、設定条件から計算して比較してみた。
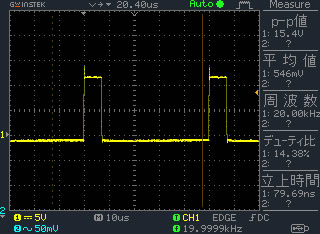
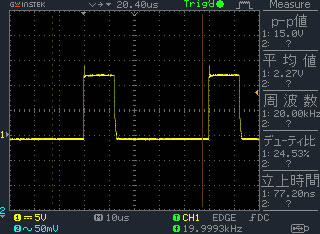
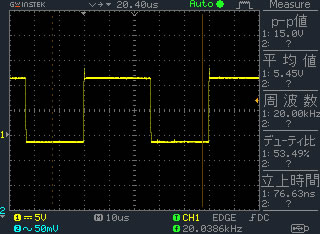
測定時にオシロ画面をハードコピー例を上に示す。 綺麗な矩形波であり、デューティ比も画面上に表示されている。
いろいろなケースに於いて、この dt 計算値とオシロ画面のデューティ比データをまとめたのが下左のグラフである。
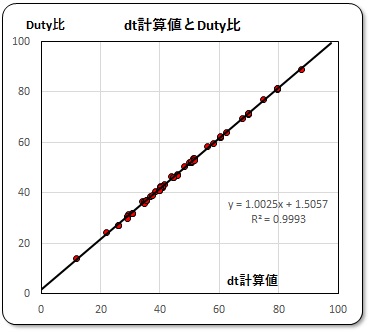
自分でもびっくりするぐらい一直線上に並んでいるのである。 この事は、Arduino は指定された計算どうりに dt 値を計算して出力し、モータドライバはArduinoより指示された値どうりのPWM波形を出力している事を示していると推定できます。
しかし、小さなデューティ比のゾーンでは、まだ検証出来ていませんし、コアレスモータの場合の挙動も確認出来ていませんので、断定はできません。
そして、その制御波形で駆動された動力車の走行特性は、上右のグラフのように、モデルによって異なって来ているのである。
2021/5/7 作成