
HOME >> 鉄道模型工作室 > マイコン式の運転操作台を作ろう 速度調整機能の確認
鉄道模型工作室 マイコン式の運転操作台を作ろう 速度調整機能の確認
テスト走行を実施している時、車種の設定ダイヤルの機能が思っていた状態よりも速度が速い感じがしていたので、走行速度を測定して確認することにした。 心配は的中してしまい、思わぬ失態が暴露してしまったのである。
■ 走行速度の測定
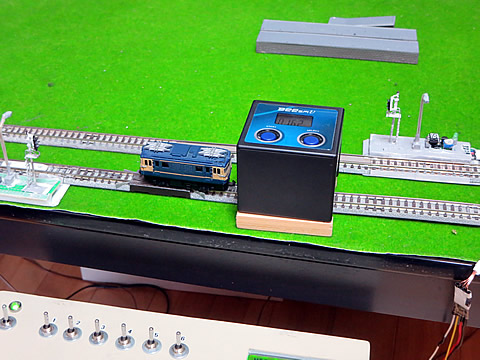
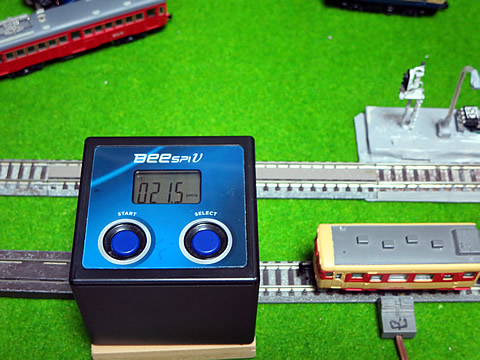
レイアウト上を走行する模型車両の速度を計測する計測器として、理化学ショップで見つけた「BeeSpiV(ビースピV) -簡易速度計測器-」を使用する。 この計測器は、「傾斜台式測定法」(2011/8/13)にて紹介したもので、高校などの物理の授業でも使われているとのことである。

 .
.
この速度計の測定結果とArduinoから指示された速度の違いを検証しようとしたのである。
測定方法は、マスコンを操作してノッチ1からノッチ4において速度が安定した状態で車速を計測する。 これを車種設定ダイヤルにて設定した車種(A〜Fまで、スケッチでは syasy 変数としている)毎に実施する。 マスコンのノッチ1は 60Km/h、ノッチ2は 80Km/h、ノッチ3は 100Km/h、ノッチ4は 1200Km/h を指示している筈なので、その通りの速度が出ているのかどうかをチェックしたのである。
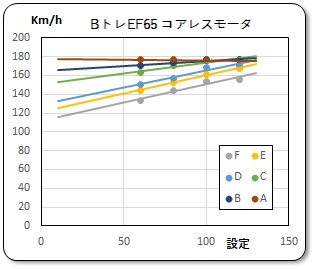
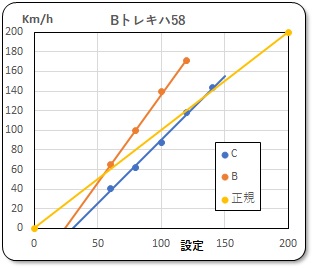
測定車両はBトレのEF65機関車で、KATOのコアレスモータを搭載して動力車であろ。 その測定結果を右のグラフに示す。 横軸はディスプレイに表示された車速で、縦軸はビースピVで読み取った cm/s のデータをスケール速度に換算したものである。 換算値は、1cm/s ⇒ 5.4Km/h である。
グラフを見て、最初は何を測定したのか茫然として見ているだけであった。
なんだ! このグラフは・・・・・・・・・・・・・・・・・・? 車種別にPWM制御のデューティ値を設定しているので違った値となるのは当然であるが、全然的外れなのである。 違い過ぎるのである。 何故?
■ オシロスコープで波形を観察する
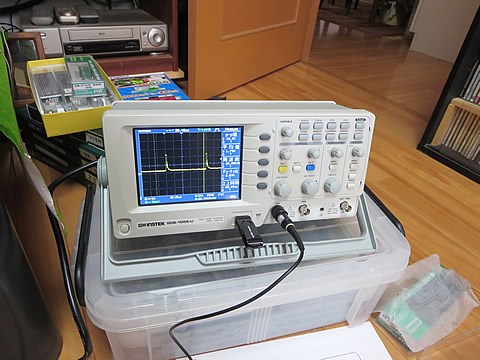
本当にPWM波形が出力されているのだろうか? そして狙いどうりのデューティ値になっているのかを確認するため、オシロスコープで観察することにした。


何時も使用しているオシロスコープを右脇に置き、運転操作台からレイアウトに給電する。 今回はホームが邪魔になるので取除いている。
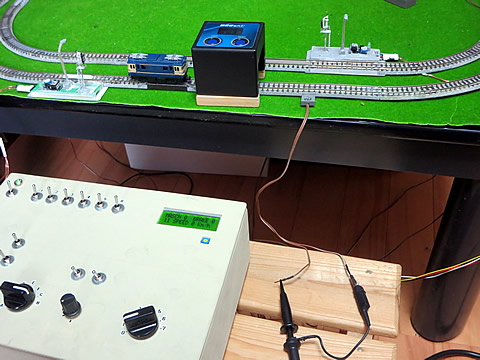
ビースピVを線路上に設置してその傍の線路に給電用フィーダーを使って線路の電圧信号をオシロに取り込む設定にしている。
◆ 常灯設定ダイヤルの確認
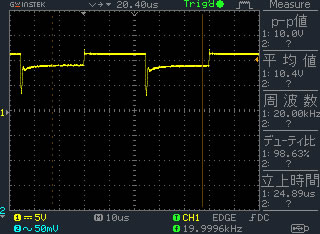
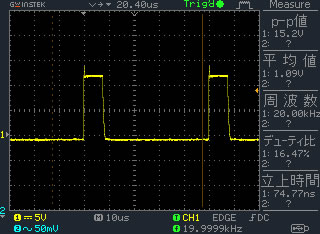
最初に、常灯設定ダイヤルによるPWM波形を観察した。 もっとも小さくなるパルス波形と考えて、その形状を見たかったのである。 線路上に「Bトレ用のバンダイ製台車を使った室内灯工作」(2020/12/20)で工作した3台の客車を乗せて給電し、その時の電圧波形を観察した。 下左が点灯する最小値であり、下右はボリュームの最大値である。
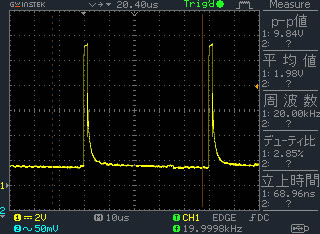
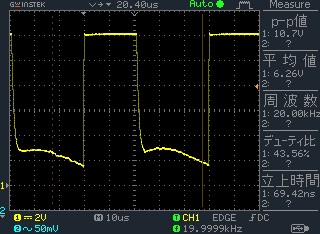
まず、パルスのキャリヤ周波数が 20kHz になっている事が確認でき、まずは一安心である。 また、デューティ比が 2.85%と小さくても鋭い波形となっているものの、綺麗矩形波になっていないのはコンデンサの影響かも知れない。
◆ Bトレコアレスモータ搭載の動力車
次に、動力車単体での走行テストを実施した。 KATO製のチビ凸用動力ユニット(品番:11-109 コアレスモータ)である。
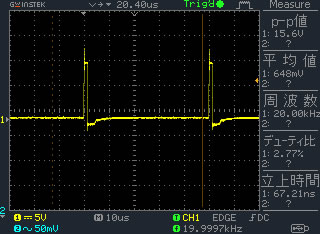
ゆっくり走り出した状態 測定:15km/h 指定: 60km/h 測定:133km/h 指定: 100km/h 測定:153km/h
波形は綺麗に観察出来たが、コアレスモータ独特の波形を示しているのでオシロでのデューティ比計測が出来なかった。 パルスOFF時の電圧波形が大きいため使用したオシロでは計算出来ないようである。 パルスONのパルス幅を読み取れば良いのであるが、その方法をまだ取得していないのだ。 また、パルスがOFF時の電圧がなぜこんなに高いのか? 逆起電圧の関係と思われるが、素人の自分には理解できていない。
このため、通常のDCモータ搭載車両に代えて測定することにした。
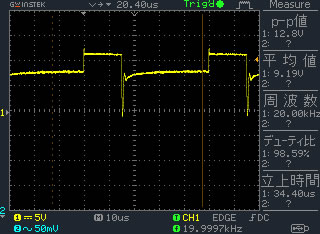
◆ Bトレ動力車
KATO製の小型車両用動力ユニットを搭載したキハ58 198号車を使ってテストを実施した。
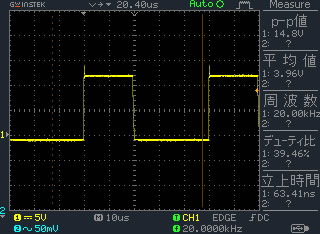
こちらの場合は綺麗な矩形波となっており、表示されているデューティ比も信頼できそうである。 そこで、この方法でテストを実施する事にした。
KATO製動力ユニットのキハ58 198号車の他に、鉄コレ動力を搭載した琴電73号車(15m級)も測定したが両者の測定値はほとんど同じであった。 しかし、やはり思ったよりも早いのである。
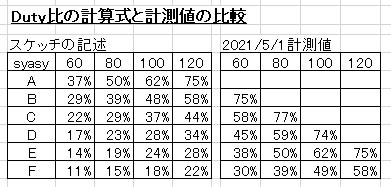
そこで、スケッチに記述した計算式をもとに、車種別のデューティ比を計算し、オシロより読み取った値と比較した。 その表を右に示す。
データを比較すると全てのデータが 2.5倍なのである・・・・・・・・・・。
賢明な諸氏なら、ハット気が付くであろう! 私も気が付きました! 2.5倍、即ち 100/255 なのである。 これは、「マイコン式の運転操作台を作ろう 制御ロジック」(2021/4/17)で間違えたと思ったことが、間違えでは無かったのである。
記事では何事も無かったように記述していますが、最初は%の値をそのまま使用してテストしていました。 でも、スケッチの記述ルールに気が付いて修正したのですが・・・・・・・。 これが間違いだったのです。
原因は、Arduino のキャリヤ周波数を 20khz に変更したことにあります。 間違いに気が付いて、関連する過去の記述に注意事項を急遽追加しました。
20khz に変更した時、ノコギリ波のトップの値を 255 から 99 に変更して20kHz 化を実施しています。 従ってデューティ比の指定は0〜99までしか指定できません。 このため、スケッチでのanalogWritr( ) のコマンドは使用できるものの、その指定値には注意が必要です。 99以上の値は無効なので、結果的にはデューティ比100%の状態になるものと推定します(未確認ですが・・・・・)。
しかし幸いなことに、0〜99までで 0〜100%を指定することになるので、デューティ比のパーセント表示そのままの値を使用すれば良い事になります。
こうして、デューティ値の計算式を変更してスケッチの記述を修正した。 スケッチのバージョウンが Micon-Untenda-30.ino にもなってしまった。
■ 車種特性とのマッチング
修正したスケッチをもとにテストを実施した。 車種設定ダイヤルを固定して、マスコンによりノッチ状態を変えて、車速を計測した。


ノッチより指定した設定車速と測定結果をグラフ化して、その一致具合を見ようとするものである。 両者が一致すればピタリとマッチングしていると言える。
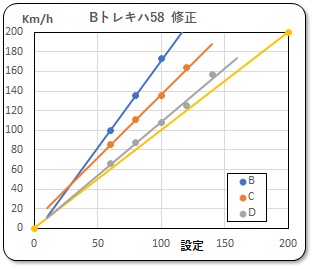
キハ58号車でテストした結果を上に示す。 左のグラフは今までのいきさつ上、Duty値の計算式は原点を通る形にしているものです。 でも、モータの特性上、いちいちに対応して正規線よりもかなりズレています。 そこで、最初に戻ってY切片のある式に変更した状態が右のグラフです。
このグラフより、キハ58号車は車種設定をDモデルと設定すると、ディスプレイに表示された車速と走行中の車両のスケールスピードがほゞ一致するようになることを示しています。
式を変更すると、常灯調整レベルとの関係が崩れてしまいます。 テープ式LEDの室内灯を搭載した車両での点灯開始電圧はY切片の値よりも低いのです。 通常のモータの場合は点灯するレベルでは車両はまだ動きませんので、常灯調整は不要なのです。
必要なのは低い電圧で動き出すコアレスモータ搭載車の場合ですので、車種設定をコアレスモータ専用のパターンを探って設定することにします。
次回は、車両別に車種設定ダイヤルを確認すると共に、コアレスモータ車の設定を探っていきたいと思っています。
2021/5/3 作成