
HOME >> 鉄道模型自動運転システム > 登山鉄道の自動運転システム 制御部の工作
登山鉄道の自動運転システム 制御部の工作
自動運転システムの頭脳となる制御部の工作を実施する。
■ 制御部の設置場所
まず最初に制御回路の設置場所を考えた。 登山鉄道ブロックとその制御ボックスが別体とした場合、多くの信号線や操作用電線は長い配線が必要であり、両端はコネクタで接続させることになる。 このためメンテナンスを実施する時は、この配線の脱着が必要となるために面倒な作業となってしまう。 そこで、登山鉄道ブロックと制御部を一体化させ、メンテナンスのための脱着作業の容易化と、配線の簡素化を狙うことにした。
そして改造作業のために、登山鉄道ブロックをレイアウトから取外し、書斎に持ち込んでシステムの組込工作と確認を実施する。

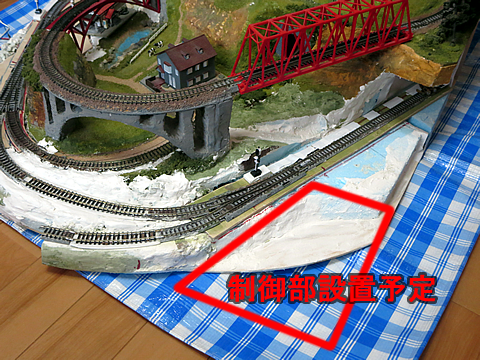
制御部を設置しようと考えている部分を上右の写真に示す。 この部分に Arduino などの制御回路を取り付けようと考えている。 スイッチ類やボリュームは制御部分の前面に設け、上部は取外し可能な蓋とし、丘などの造形を作って隠してしまおうという考えである。
■ 回路構成の検討
過去のシステムを参考にして回路構成を考えてみた。 回路構成のおもな内容は、
- 制御のメイン基板は、Arduino のシールドとして重ねるのでは無くて、別置きの基板とする。
- 操作パネルには、速度設定用のボリュームやスイッチなどを配置するが、表示用のLEDはメイン基板の端の設置し、パネルに設けた穴より表示させる事によって配線を容易化する。
- 通過センサ用の調整用半固定抵抗は、メイン基板上に取り付ける。
- 自動運転と手動運転が使えるようにする。
- 通過センサは、室内の明るさの影響が少ないようにと、LEDによる強制照明方式を採用する。 ただし、信号は先頭車両が通過したことを知らせれば良いので、CdSセンサは1個使用とする。
を取り組むことにしている。 自動運転と手動運転の切替は、ソフト的に実施すると複雑で面倒なシステムとなるので、制御部の上の蓋を開けて、接続している導線のソケットの抜き差しを変えて実施する。 レイアウト側に接続している配線を、自動運転側ソケットか、あるいは、手動運転側ソケットに差し込みを変えるだけの超簡単な仕組みとするのだ。
回路構成も決まったのでいよいよ電子回路の工作を始める。 まずは、先代のシステムで使用した制御ボックを解体し、部品の再利用を図った。 下左の写真。 メインボードは新しく作ることにするが、パワーボードは修正工作にて対応した。 ボリュームや抵抗類など再利用できる部品は再活用する。 使用するボードとArduino本体を置いて見て、設置場所の確認を実施し、工作を開始する。 下右の写真。


 .
.
■ パワープレートの工作
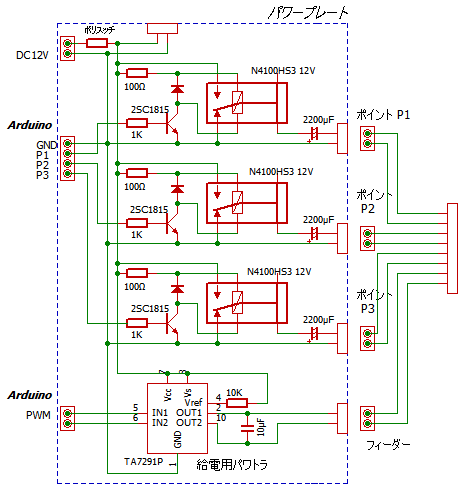
ポイント駆動回路と給電制御回路のパワー系の制御回路をひとつにまとめて製作した。 ボードは解体した部品を流用したため、変更した部分を工作した。 変更点は、ポイント駆動回路は3回路で良いので一つの回路を取り外し、空いた空間に、モータドライバICを使用した給電制御回路を組込んだ。
電源は、12Voltの独立したACアダプターから供給する。 安全のために過電流防止のポリスイッチ RXEF065 も組み込んだ。
ポイント制御は、Arduino からのON/OFF信号によって駆動回路を介して、リレーを駆動させる。 このリレーのON/OFFによって、2200μF のコンデンサの充電または放電を実施し、ポイントの分岐と直進の切替を実施させる。 Arduino からのON信号によって、ポイントは分岐に切り替わり、OFF信号によって直進に戻る動作となるように、ポイントの接続方向を現物確認にて接続する。 このコンデンサ方式は、短時間での通電で済むので、ポイントのソレノイドの焼損については安全である。
リレーに関しては、ON時は常時通電となるが、電流値が小さいので安全範囲と考えている。 ただし、コンデンサの充放電時にはリレー接点に大きな電流が流れるので、接点定格の大きいリレーを選択している。 即ち、接点定格3AのN4100H53 12V を選択し、さらに通常は放電側になる回路とした。
3300μFのコンデンサは不要となったが、邪魔にならないので配線だけ切ってそのままにしている。
給電制御はArduino によるPWM制御とする。 analogWrite 関数を使用すると簡単な記述で実行できますが、解説書によると、PWM信号の周波数は約490Hzであり、Unoの場合は5、6番ポート使用すると、約980Hzで出力するとの説明である。 当初、この件に関して無頓着であったので、配線の都合の良い9番と10番のポートを使用した。
テスト走行などで実際に走らせると、PWM制御の周波数によってジーというモータ音がしていたが、それほど気にならなかったので、そのまま使用している。 ちなみに、TOMIX のパワーユニットでは、可聴域を超えた 20KHz の高い周波数で使用している。 もし、この音が避けるためには、高度な裏技とか、高い周波数の発振回路、そしてそれに対応できるパワトラの採用など、高度なテクニックが必要であるので腕に自信のある方は挑戦してみてください。 初心者には、ジーというモータ音も実際の電車らしいのだと思うことで楽しみましょう。
給電用パワトラは、低周波のPWM信号に応答してくれる TA7291P を使い、 Arduino からのPWM信号により、DC12volt のパワーラインを制御し、フィーダー線に出力させるようにした。 工作したパワープレーを下に示す。
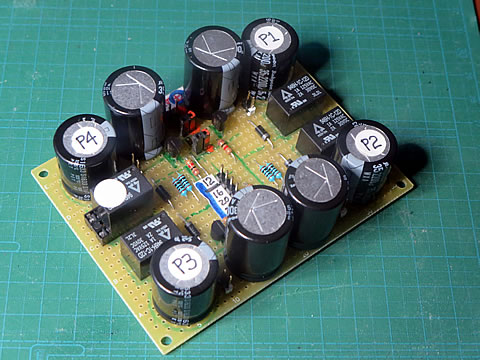
上左が改造前のパワープレートで、上右が改造後のパワープレートである。
■ メインプレートの工作
メインプレートは、路線終端のエンドプレートからのセンサ信号や、操作パネルからの指示信号を受け、 Arudino への入力信号として処理する回路類を組込んでいる。 操作パネルには、スイッチ類とボリュームを配置しレイアウト端部の端に設けつようにする。 これらの回路構成を下に示す。
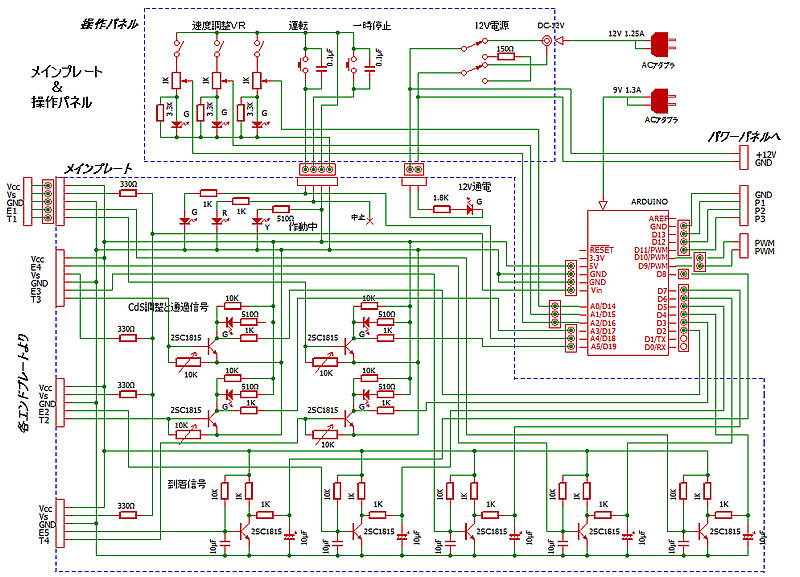
メインプレートと操作パネルの回路図 ( 拡大図はこちら )
 .
.
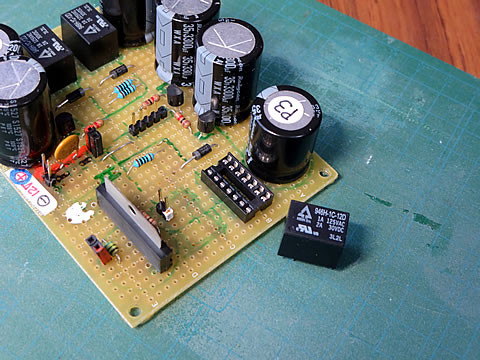
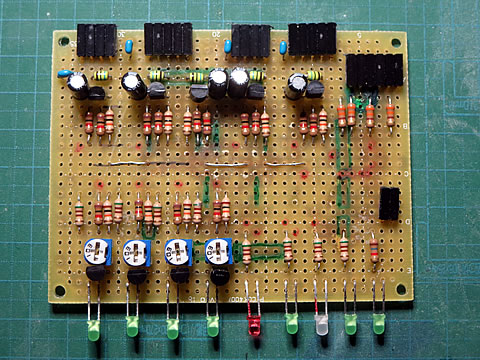
まずメインプレートを工作した。 右の写真。 ユニバーサルボードなど、使用できる部品は分解品を再利用している。 ピンソケットを寝かしているのは配線の高さを抑えるためであるが、この選択は良くなかったようだ。 また、端部には、操作パネルの穴を通して外から見えるように、表示用のLEDを等間隔に並べている。
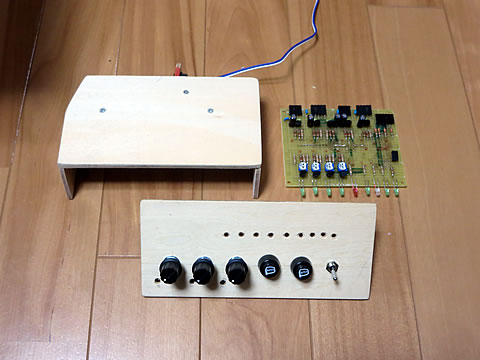
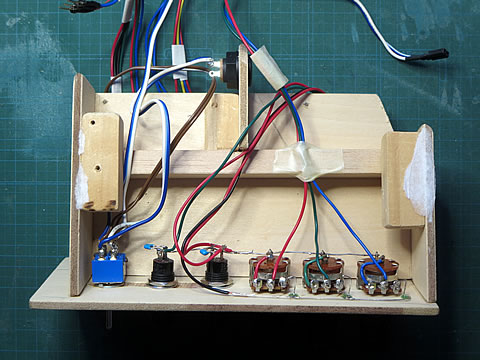
このボードを取り付ける台と操作パネルはベニヤ板で工作した。 パネルには、可変ボリュームやスイッチ類を取り付け、さらにLEDが見える様に穴を開けている。 この穴は、工作したボードに取り付けたLEDの位置に合わせているので、ここからLEDの点灯具合が分かるのである。 また、パワーユニットに供給する12ボルト電源のDCジャックもここに取り付け、パネルのスイッチにて ON/OFF させるのだ。
これらの部品を下に示す。 左の写真が部品の表側で、右の写真が裏側である。 そして、操作パネルを支える台も工作する。
さらに、手動と自動運転の切替のためのボードも工作した。 このボードは単に8個のピン穴のあるピンホルダーを2個並べただけのボードである。
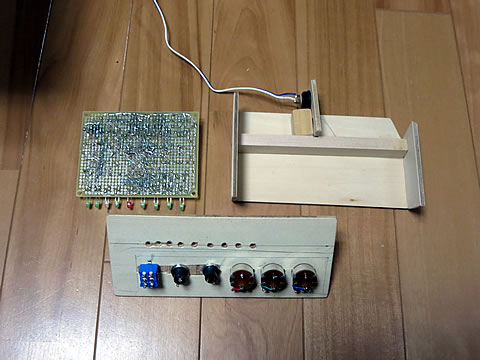
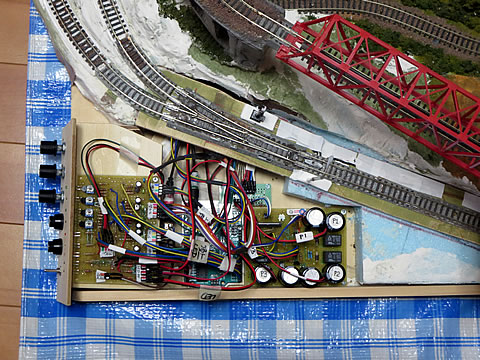
これらのボードと Arduino UNO をレイアウトの設置予定場所に置いてスペースの具合を確認する。 下の写真。 なお、制御部の新設のため、レイアウトベースの拡張と補強も実施した。

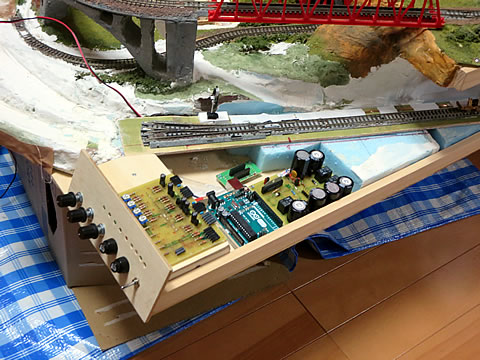
無事に予定した空間に収まる事が確認できたので、別体であった操作パネルと台を木ネジで固定し、メインプレートを台の上に肯定して配線作業を始める。
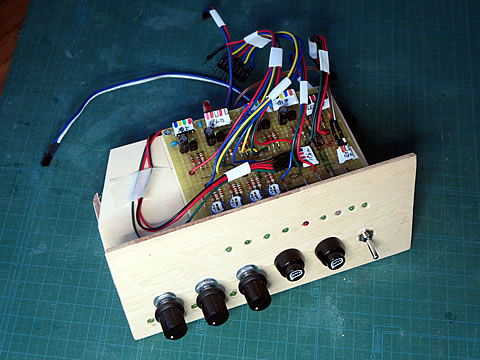
使用する可変抵抗器には、スイッチ内蔵式のものを使用しているので、その配線とともに、スイッチがONの時は、その状態を示す緑色のLEDが点灯するように、ボリュームの傍に配置した。
■ 配線工事の実施
電子回路が出来上がって来たので配線工事と並行して、確認作業も実施した。 最初にポイントの配線とフィーダーの配線のチェックを行うため、手動回路で機能の確認を実施した。
まず、このポイントの駆動と給電を手動で実施出来るように、配線の選択を手動回路にした。 その仕組みはを説明する。 下左の写真に示すように、8個のピン穴をもつソケットが2列見えるが、右側のソケットは自動運転回路であるパワープレーとに接続されている。 一方、左側のソケットの配線はレイアウトユニットの外に取り出しているので、この配線の先にある端子を、準備したパワーパックとポイントスイッチに接続する。
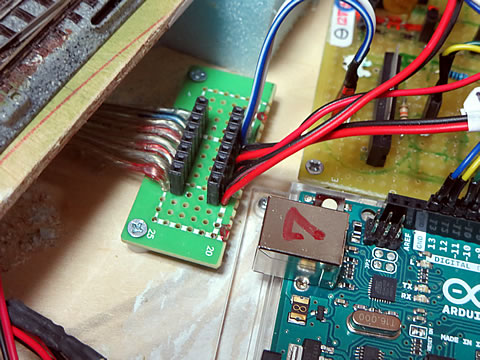
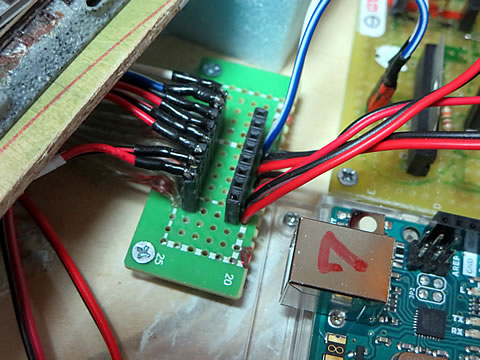
そして、3ヶ所のポイントとひとつのフィーダー部に接続された配線は、L字型のピンヘッドと接続されており、ピンヘッドを右側のソケットか、あるいは左側のソケットかに差し込むことによって選択しているのである。 今回は上右の写真のように左のソケットに差し込んで手動運転モードとしている。 右のソケットに差し込んだ場合は自動運転モードとなる。 準備したパワーユニットとポイントスイッチ、およびテストの様子を下に示す。


次に、物理的な配線を全て実施した。 その様子を下に示す。 狭い場所にゴチャゴチャの配線となってしまい、見通しが甘かったことを痛感した。 Arduino と基板を組み合わせたシールド形式の方がよかったのではないかと反省する。

制御機器の設置と配線が完了したので次に作動チェックを実施する。
2019/8/16 作成