
HOME >> 鉄道模型自動運転システム > ATS列車自動停止システム 出発制御の検討
ATS列車自動停止システム 出発制御の検討
駅構内の制御方法として、先回は入場制御の検討を実施したので、引き続き出発制御の検討を実施した。
 .
.
■ 制御回路の再検討
駅構内の出発制御ユニットは、マイコンの脱着方法と設置場所を勘案し、標準制御ユニットとは構成方法を変更した。
制御ユニットのメイン基板は高架駅を構成するプレートの裏側に設置し、マイコンだけは制御のチューニングのために、レイアウト完成後も容易に脱着が出来る島式ホームの端ホーム内に設置することにする。
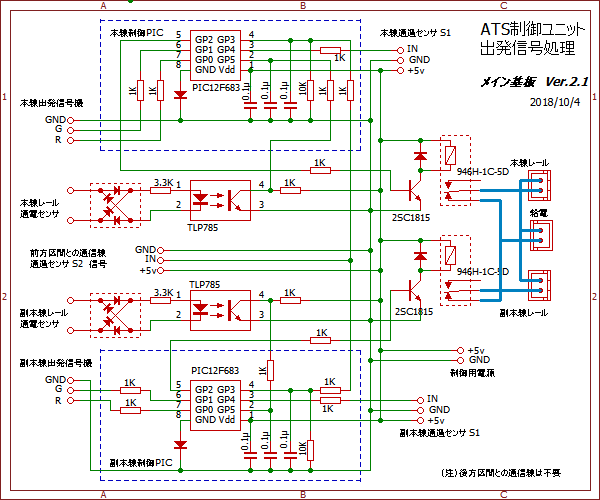
このような構成にした時の回路図を右に示す。 点線で囲ったマイコン部分を別基板にしておき、端ホーム内に設置できる大きさにする。 標準ユニットの上のボードからさらにリレーを取り去ったのである。
もう一つの変更点は、PICマイコンのポートが不足する事への対応である。 入力ポートとして、列車が到着したことを検知する通過センサS1と、先方区間を通過する列車を検知する通過センサS2に加えて、ポイントの切り替え状態を判断する通電センサの信号が増えたので、信号機の橙色を出力するためのポートを入力ポートとして振分けたのである。
当初の構想では、S2信号とのOR回路を基板上に設けて対応する予定であったが、ロジック的に心配であったので、別入力方法に変更した。 このため、信号機は赤と緑の2灯式に変更することになった。
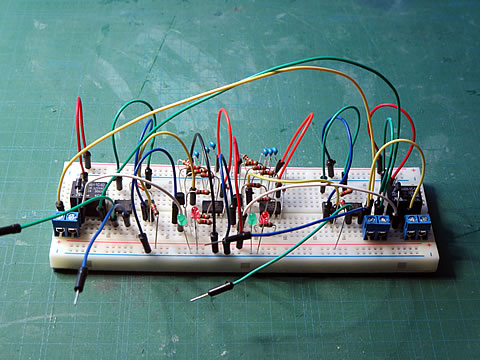
この構想をもとに、ブレッドボード上に回路を構成してものを下左の写真に示す。 そしてテスト用のレイアウトにて配線を実施してシステムを構成した。

■ 出発制御ロジックの検討
 .
.
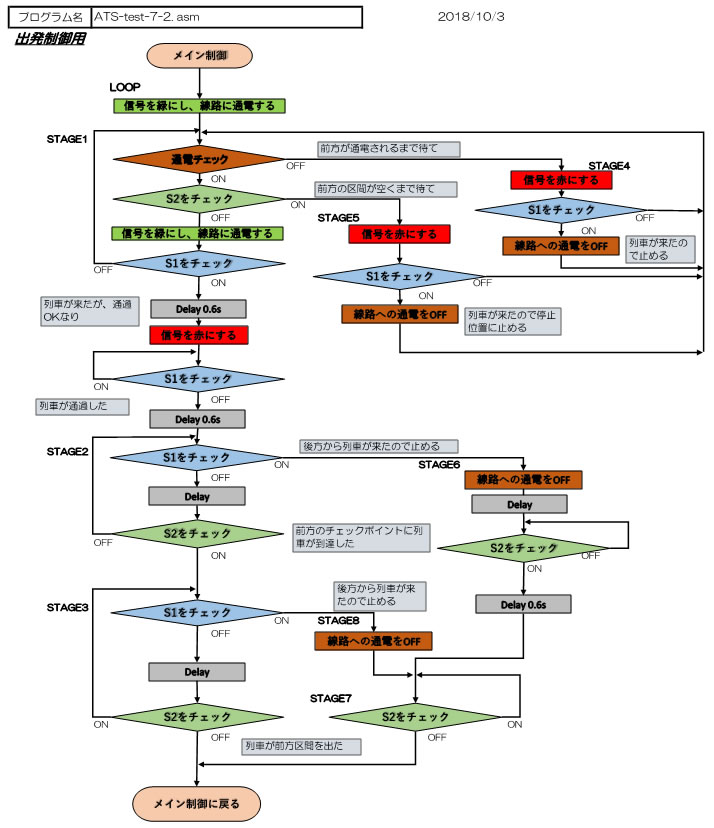
次に、ロジックを検討する。 ただ通過して行く標準制御ロジックをメインのルートにし、それに、通電センサの情報を絡ましていく。
まず、ホームを通過可能かどうかをチェックする。 ギャップの先の通電状態をチェックして、通電が切れていると信号を赤にするものの、ホームには進入させて通過信号S1がONになるまで走行させる。 そして列車はギャップ手前で停車する。
即ち、列車はホーム内に無事滑りこんで停車することが出来るのだ。
通電が開始されれば、次のチェックポイントであるS2センサをチェックして先方区間を列車が走行中であるかどうかを確認する。
どちらの場合も、出発は出来ないので赤信号を点灯して停車させておく。
先方区間が空くと、出発進行の緑信号を点灯させて通電を開始する。 通常はこのループを回して列車を通過させる。
列車が通過してしまうと、信号を赤にして後続から列車が来た場合には、通常制御と同じように停車差せて先方区間が空くのを待つ。
この時の制御フローチャートを右に示す。
なお、ここでは出発進行によってポイントの上を走行中は、ポイント操作を実施しないということを前提にロジックを組んであるので、後ろから後続列車がホームに入線してくる場合もありうる。
この場合、先行列車に追突しなければ、即ち十分な間隔があればホーム内の通過信号が後続列車を捉えて停止させるので問題無しと判断しているのだ。
もしもドッキングしてしまったら対処のしようがないのだが・・・・・・・。
また、本線と副本線とも同じロジックを搭載させている。
そして、充分な長さの列車を走らせて作動状態をチェックした。

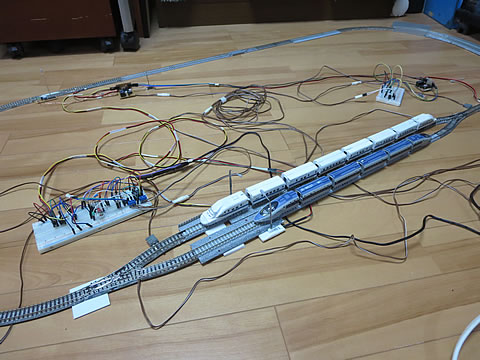
先行する列車が先方の通過信号を通過して閉塞区間が空くまでは停止している状態も確認できた。
ただし、出発後、先方の通過信号に達するまでは、列車がこの区間にいるという情報はソフト上での情報なのである。 もし、この間にポイントを切り替えた場合には、反対側のマイコンにはその情報がないため列車を発進させてしまう欠点がある。 この対策は 本線用と副本線用の二つのマイコン間の情報の共有が必要なのであるが、今のところ対応の方法がない。
本線と副本線の制御をひとつのマイコンで実施する方法もあるが、ポート数の多いマイコンの使用と、複雑化するロジックが要求されるので、まだ手が出せません。 ポイントの切り替えは、列車が先方の通過信号を ON させるまで待たせるような運用の仕方で、当面は対応することにしよう。
テスト走行中の不具合に四苦八苦するも、やっとまともに作動するシステムまで持込むことが出来た。 しかし、更なるチューニング作業や、思わぬバグへの対応などまだまだ安心できません。 実際にも、レイアウトに設置後のテストで、このロジックを放棄する事態に直面しました。
2019/8/29 作成