
HOME >> 鉄道模型自動運転システム > 卓上レイアウトで楽しもう 自動運転 その25
卓上レイアウトで楽しもう 自動運転 その25
先回、ビデオ解析として報告したレイアウトについて、後追いであるがハードに関する部分を紹介しておこう。
 .
.
■ 工作したユニット
今回のシステムに使用するために、工作した光センサの内容を説明します。 工作対象物は、「卓上レイアウトで楽しもう 自動運転 その15」(2020/1/28)で工作した信号機を使いました。
この工作物は、少しグロテスクであった事や、せっかくの光センサを使っているのに、センサ信号として出力していなかったので、再工作することにしました。 修正した内容は、
- 信号機の柱と、光センサ用の投光器の柱を別体にする。
- 通過信号は負論理回路に変更し、その信号を取り出せるようにする。
- 指令線が接続されていなくても信号機として単独でも使用できるようにする。 このためには指令信号回路にプルダウン抵抗の 20KΩを追加し、LOWの場合は青色を点灯するように変更する。
- 配線はピンホルダを使って接続出来るようにする。 設置場所とマイコンの間はリード線の長さを変えて調整する。
- 柱を別体にしたために部品の配置スペースが不足した。 このため基板は新規部品を使用する。
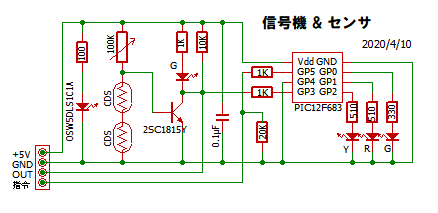
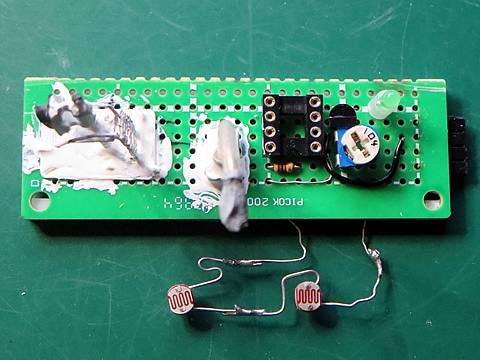
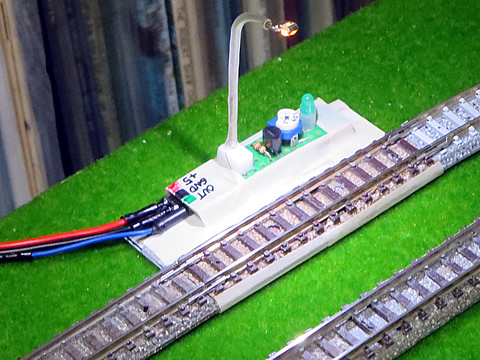
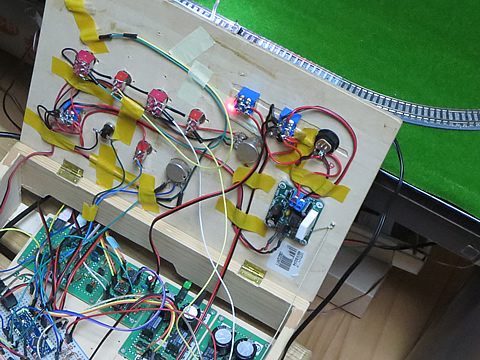
この新しい回路を右上に示す。 工作した新しいユニットを下に示す
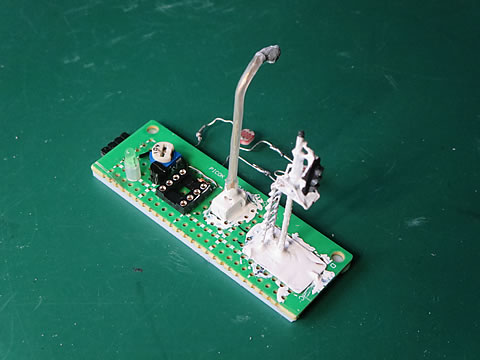
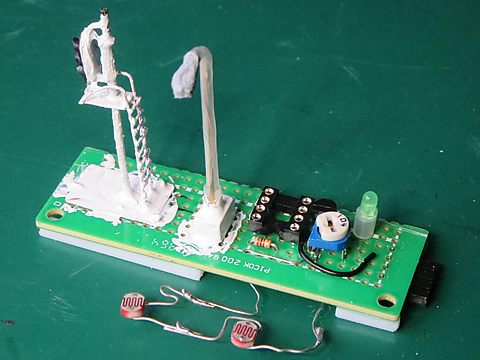
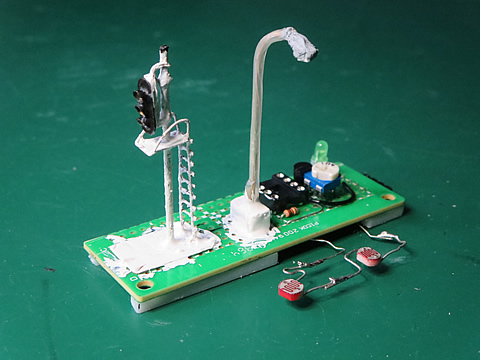
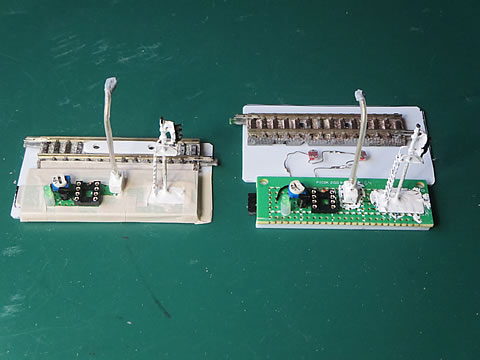
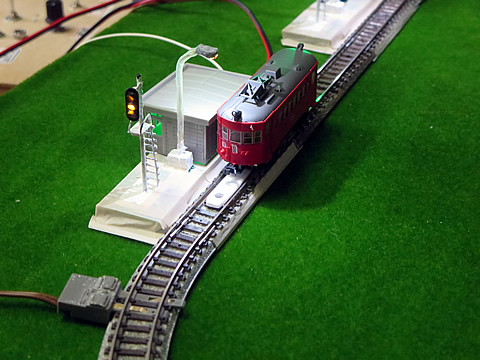
信号機は、φ0.5mmの銅線を使って工作した梯子を取付けたので、信号機らしくなった。 そして今回も、同じ仕様のユニットを2セット工作した。 そして、0.5mmのプラ板にMTテープを使って固定した。 絶縁や隙間隠しも兼ねてベタベタと貼り付けている。 このMTテープを使うと塗装も楽だし、何よりも分解が容易なのである。 綺麗に剥がすことが出来るのである。
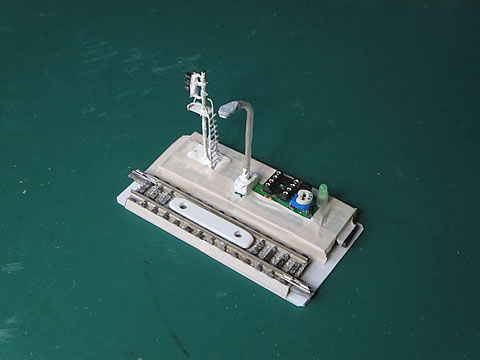
この投光器のそばには小さな作業小屋を被せれば、機器類を隠すことも出来るのである。


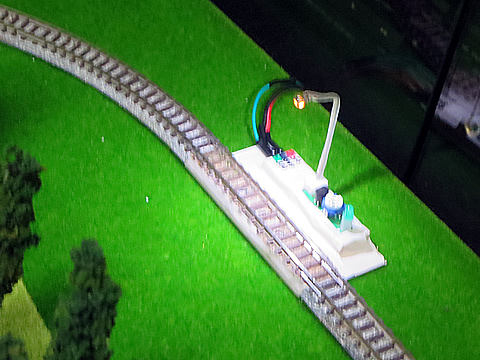
勿論、PICマイコンのプログラムの一部変更して、点灯テストを実施した。 当初はセンサがうまく動かず、原因をあれこれ探ったが、やっと半固定抵抗の値に問題がある事が分かった。 回路構成を正論理から負論理に変更したので、今まで使っていた 10KΩでは、トランジスタのベース電圧が充分に下がりきれない事が原因だったのである。 そこで、回路図に示す様に、100KΩの半固定抵抗に変更した。
このCds 光センサを使った最初のシステムは、「光センサーを使った通過センサーを作る」 (2014/9/4)です。 ここでは負論理での回路であり、100KΩの半固定抵抗を採用していたので、昔のノウハウが生かされていないようですな・・・・・・・・・・・・!。
信号機としても、作動している事も確認できました。
さらに、光センサの追加が必要になったので、今度はセンサだけのユニットを工作した。 回路は上記の回路図から信号機部分を取り去った状態と、基盤は上記の工作で分解してものを再利用した。 こちらのユニットの配線は3本でよいのである。
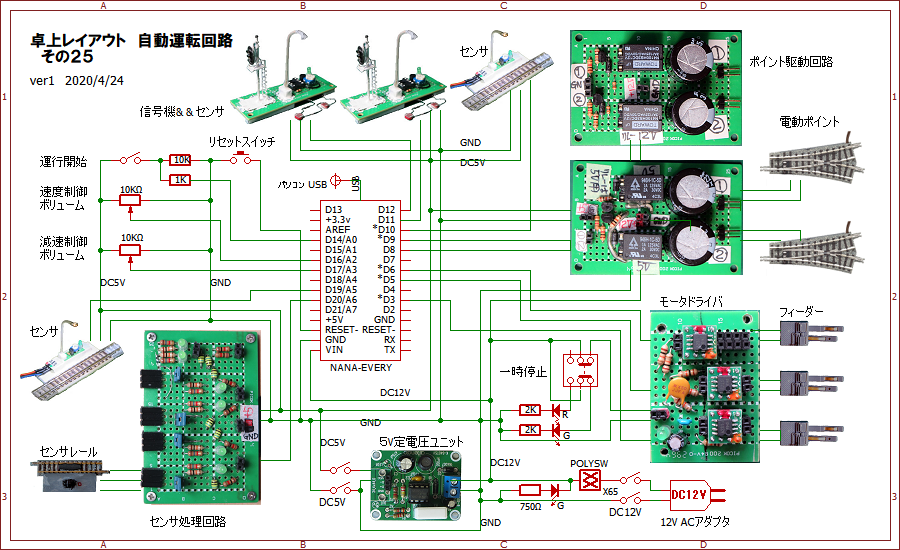
■ 自動運転 その25 の回路構成
 .
.
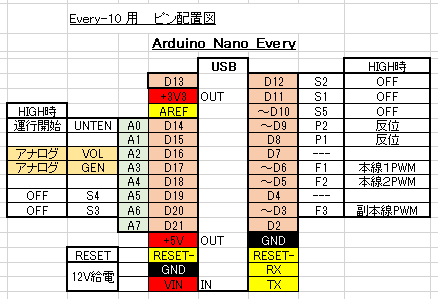
レイアウトの線路配置は、先回の解析 No.1に示した配置である。 また、Arduino Nano Every のピン配置図を右に示す。
電子回路については、
- 新しく工作した光センサは、信号処理が必要ないため直接 Arduino の入力ポートに接続させている。
- 信号機の制御は実施しない。
- 脱線等のトラブル時には、電車の走行を一時停止させたいため、専用にスイッチを新設した。 このスイッチは、線路への給電回路、即ちモータドライバ回路の12Vプラス部分を一時遮断すればよいので、トグルスイッチを使ったハード回路で対応した。 そして、スイッチのON/OFFに合わせて、緑と赤のLEDが点灯するように構成した。
回路図を下に示す。
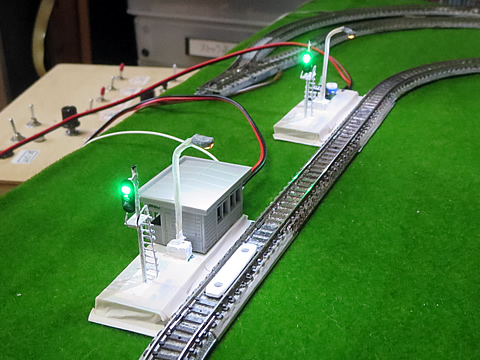
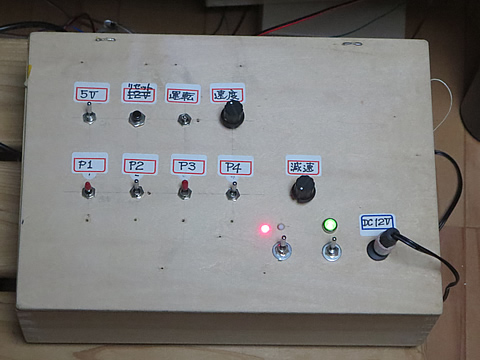
制御盤の様子を下に示す。 赤色LEDが点灯しているスイッチが新設した一時停止のスイッチである。 通常時は緑が点灯し、一時停止時は赤が点灯する。
実際の動作状態は、先回のビデオ解析 NO.2の解析-7を参照ください。
今回の報告はここまでとして、次のテーマはまだ未定です。
2020/4/25 作成