
HOME >> 鉄道模型自動運転システム > 新登山鉄道 電車3編成での自動運転
新登山鉄道 電車3編成での自動運転
新しい登山鉄道ユニットの工作に合わせて、走行させる車両の整備も実施しましたので、今回の工作もいよいよ最終段階に入ってきました。 まず、電子回路やスケッチの修正などを実施した後、当初の目的であった3編成の電車を交互に運行するテスト走行を実施しました。
.
■ 電気回路について
工作の進行に合わせて、電気回路の不具合を修正し、最終的には下記のような回路となりました。 信号機の部分はまだ未実施ですが、予定として記入してあります。
回路図の詳細 ⇒ fig-138-1.png
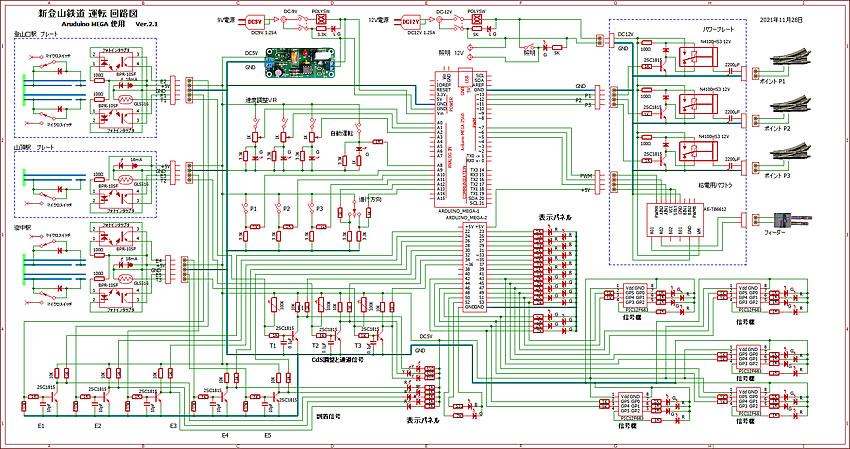
マイコンは、Arduino MEGA を使用していますが、多くのポートは、表示パネルのLED点灯制御に使用しています。 手動運転の場合でも、また、自動運転の場合でも同じように表示させるため、Arduino で制御させました。
給電制御は、モータドライバは東芝製の TB6612 を使って、キャリア周波数 31KHz のPWM 制御を実施しています。 このため、ヂューティ比と車速は、コアレスモータ搭載車でも通常モータ搭載と同様に、線形的に制御出来ます。 「モータドライバとPWM制御 まとめ」(2021/5/28)参照。
■ スケッチについて
運転制御のロジックについては、先に紹介しています。 今回のロジックの特徴としては、
- 手動運転と自動運転をスイッチ操作によって判断し走行制御方法を替えている。
- 表示パネルのLED点灯表示を、運行状態に従って制御している。
などが、新しく構築して制御方法と言える。 また、自動運転の場合の電車毎の速度調整をボリュームによって個別に調整出来る事、車止めの機構と制御、通過信号処理、ポイントの駆動方法などは、従来の実施例を活用しています。
現時点での制御用スケッチの内容 ⇒ Sin-Tozan-Unit-07A.html
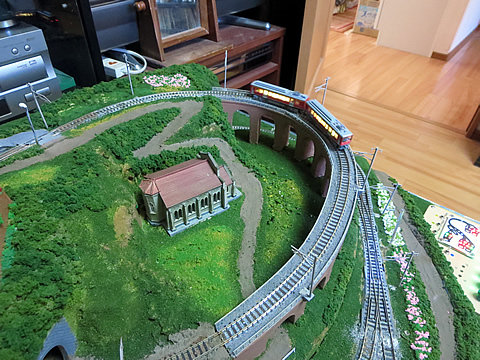
■ 走行状態の紹介
レイアウト上での走行状態について紹介しましょう。 走行させている車両は、アレグラ号、ベルニナ号、サン・モリッツ号のです。









動画でも撮影しました。

各車両ともスムースに走行しており、今までの苦労が吹き飛んでしまします。 しかし、ベルニナ号はその大きな動力装置のため室内灯が取り付けられないのが残念ですが・・・・・・・・・、何か工夫はないだろうかとあれこれ考えましたが、無理なようですね。
********************************************************************
このあとは、樹木や人物の配置などを実施して、レイアウトを仕上げて行きましょう。
2021/12/1 作成