
HOME >> 鉄道模型自動運転システム > ローカル線の自動運転 モード一覧表の追記
ローカル線の自動運転 モード一覧表の追記
物置部屋のレイアウトにて、そのローカル線の改造工事を実施しています。 中途半端ながら、レイアウト工作を実施したり、スケッチを記述したりなので、なかなか整理して報告するのが遅れています。 今回は、モード一覧表の追加状況を報告します。
■ 運転モードの一覧表
この一覧表については、「スケッチ記述のための工夫」(2023/3/10)で説明しましたが、スケッチの記述時に使うと共に、運転モードを設定する際に、図式化された走行パターンを見ながダイヤルを設定出来るようにしたものです。
そして、設定できる数は、回転式ダイヤルにて、1〜12番までの12種類ですが、その後、スイッチAとBのON/OFF を追加したので、合計 12×4=48 種類の運転モードが設定できるようになっています。 そこで、次の様に分類することにしました。
| 分類 | 分類名 | スイッチA | スイッチB | モード番号 | 内容 | 連続運転 |
|---|---|---|---|---|---|---|
第1類 |
単独列車による連続運転 | OFF | OFF | 1〜12 | 単独の列車が、レイアウトを周回して、元のホームに戻ってくる運転パターン。 | 可能 |
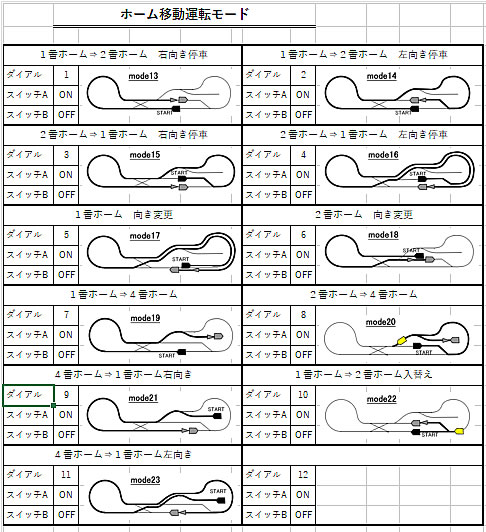
| 第2類 | 単独列車によるホーム移動運転 | ON | OFF | 13〜24 | 単独の列車が、レイアウトを周回して、他ののホームに移動する運転パターン。 | 不可 |
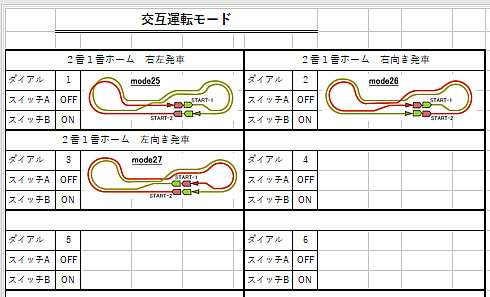
| 第3類 | 複数列車による交互運転 | OFF | ON | 25〜36 | ある列車がレイアウトを周回し、他のホームに移動するため、そのホームに停車していた他の列車を追い出して、二つの列車の位置を交代する運転パターン。 | 可能 |
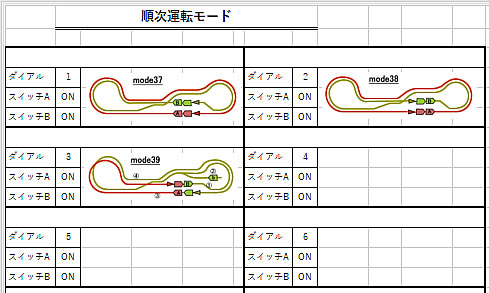
| 第4類 | 複数列車による順次運転 | ON | ON | 37〜48 | ある列車がレイアウトを周回し、元のホーム、あるいは空いているホームに入場する運転パターン。 このため停車中の他の列車を追い出す必要がないので、、複数の列車を順番に運転させることが出来る。 | 可能 |
電子回路やロジックの内容については「周回路連続運転」(2023/3/6)を参照してください。 なお、スイッチAとBの構成は、負論理回路のつもりで工作したのですが、どこかで間違えて、正論理回路となっていました。 スケッチの記述の変更で対応しました。
また、自動運転の運行開始スイッチを設けていますので、ON状態の時は繰り返し実施できるようになっています。 しかし、そのためには、終了状態と開始状態が同じ状態である必要があります。 上記の第2類の場合は、列車は他のホームに移動していますので、運行モードは空振りに終わり、通過センサの待機状態に入ってしまいます。 こうすると、リセットボタンを押して再設定が必要となるので、 運行が始まるとスイッチをOFFにしておくか、あるいは次の運転モードにダイヤルをセットしておく必要があります。 このような訳で、当初は押しボタン式であった運行開始ボタンを、トグル式のスイッチに変更しています。
● 第2類を設けている理由
第2類は不要に思われますが、列車を他のホームに移動させるために設けてます。 車両を線路に乗せる場合、1番ホームの前方にあるリレーラ線路を使用していますので、2番ホームや4番ホームに移動させる場合を想定しています。
また、この類のモードを設定しておくと、この単純な運転モードを組み合わせることによって、より複雑な運転モードとして作り上げることが出来るのです。 すると、スケッチの記述は、このモードを連続して記述するだけで、複雑な運転構成を簡単に記述することが出来るのです。
■ 運転モードの内容
そこで、この内容を見てみましょう。 現在までに追加記入してきたリストの内容です。 第1類と第2類の単独列車の運転の場合です。
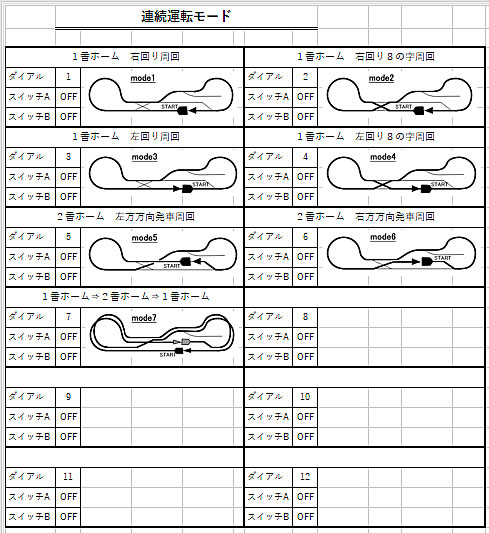
リストがだいぶ埋まっています。 でもまだ追加可能です。
***************************************************
次に、第3類と第4類の複数の列車の運転の場合です。 第3類は、ホームに居座っている列車を追い出しての交互運転です。 この場合、同時に走行している列車は複数となりますので、走行状態に注意しなければなりません。
複数の対象物を同時に監視するためには、常識的にはマルチモードに対応したコンピュータや、複数のコンピュータが必要となります。 そうでない場合は、割り込み処理などを使って工夫する必要がありますが、片方の処理に手間取っていると反対側の処理が手遅れになったりします。
例えば「卓上レイアウトで楽しもう 自動運転 その10」(2019/12/21)では、二つのマイコンとスジ屋ごっこの真似をして対応しましたが、今回はこのような手法が使えません。 そこで何らかの妥協が必要となってきますが、それはチューニングの段階で調整することにします。
 .
.
第4類は、ひとつのシーケンスの間は単独列車での走行となるので、上記の様な心配はありません。 第1類や第2類のモードを組み合わせ、それぞれのシーケンスを順番に実施していけばよいのです。
でも、この場合、次のシーケンスの運転の邪魔にならないように、スタート位置に戻るか、空いているホームに入場して待機する必要があります。 これは、右に示す15パズルのようなスライドパズルと一緒です。 空いている空間に駒を移動させ、次のスペースを開けてゆかなければなりません。
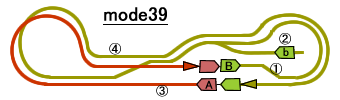
例えば、右上に示す「順次運転モード」の上二つは、同じホームに戻るパターンであり、3番目のモードは空いている4番ホームを使って、ホームを順番に開けていく運転モードです。 このmode39 は、次のモードを組合せて構成しています。
 .
.
- 2番ホームのB列車を右方向に発車させ、4番ホームにバックで入場させる。 mode20
- 1番ホームのA列車を左方向に発車させ、2番ホームに入場させる。 mode13
- 4番ホームのB列車を左方向に発車させ、1番ホームに入場させる。 mode23
■ 運転モードの走行状態
設定した運転モードについて、mode1からmode27までをスケッチに落とし込み、テスト走行を実施しました。 今回は、上記で述べたように、チューニングを必要とした第3類の運転状態を紹介しましょう。
問題となった点は、追い出した列車が停車のために減速し停車するまでの間に、追い出された走行中の列車が次の状態である必要がありまます。
- 減速制御が影響するゾーンまで来ていないこと。
- 操作を必要とするなポイントまで来ていないこと。
なのです。
 .
.
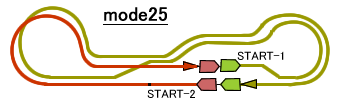
まず、mode25 の場合は、同じような動力特性を持つ二つの電車の場合で走行させて、通常速度や減速速度を変えてみても、上記の二つの課題をクリアーできませんでした。 1番ホームに停車していた列車がSTART-2で発車した後、2番ホームに入場するタイミングが重なってしまったのです。 1番ホームに入場してきた列車が減速し停止した後に、2番ホームに入場操作をするようにしていたので、タイミングが重なってしまうと対応できないのです。
原因となったのは、当初のシステム設計がまずかったからです。 このレイアウトの給電制御は、両渡線の中央の境にして左側のループを給電を制御するF3のゾーン、ホーム4とポイントのP2とP4を含む中央部のF2のゾーン、ホーム1と2と右のループを制御するF1のゾーンの三つの給電制御ゾーンを設けています。 進行方向はそれぞれのゾーンを独立して制御できるのですが、速度を制御するためのPWM制御は、F1とF2を一緒にしてしまっているのです。 さらに、1番ホームと2番ホームの進行方向制御も同じなのです。 このまずい設計が今となっては影響しています。
- 電子回路やArduinoのポート設定では、独立制御出来るF4の構成も残っているので、F2をF4に変更することも可能ですが、見ていてもそれほど違和感が無いので、このまま減速状態になっても良しとしよう。 との結論としました。
- 次の、ポイント操作の件は、結果として脱線となってしまいますので対策は必須です。
この2番目の問題の対策として、速度やセンサの変更などを行ってみましたが、最終的にはルートを変更して対策としました。 右側ループの外周をもう一度周回して反対方向かホームににゅうじょうするように変えました。 改良後の走行動画を紹介します。

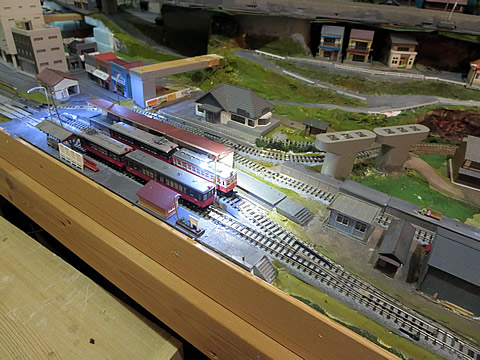
走行させているのは、電飾工作を実施した鉄コレの小型車両です。 工作内容は「鉄コレ電車の電飾を再工作する その4」(2022/4/29)などでを参照ください。

mode26やmode27では、速度制御の影響だけですので、調整なしで対応しました。


二つの車両の動力特性が似通っているので、スムースに同時走行を実施している様子が分かると思います。
*******************************************************
なお、第4類の順次運転については次回に報告します。
2023/3/25 作成