
HOME >> 鉄道模型自動運転システム > 登山鉄道の自動運転システム システムの変遷
登山鉄道の自動運転システム システムの変遷
この登山鉄道路線は、わがレイアウトでも由緒ある路線なのである。 作っては解体してきたレイアウトに合わせて改造されてきたが、今回は ”自動運転システム" を主眼にして、そのシステムの変遷を追っていく事にする。
 .
.
■ 登山鉄道ブロックのはじまり
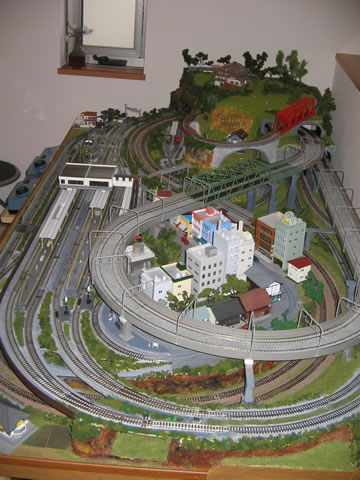
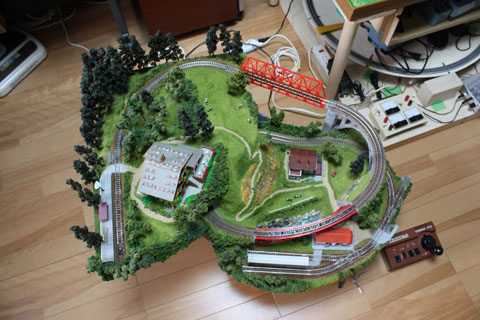
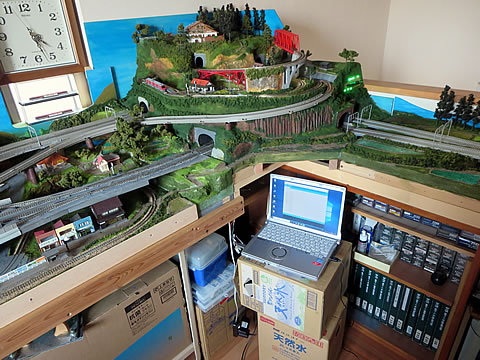
登山鉄道ブロックは、1畳程度の3層レイアウト時代から、より立体的なレイアウトとして工作したブロックである。 最初は、麓の駅と頂上の駅との間を往復運転するだけのレイアウトであった。 右の写真はレイアウトの全体で、下の写真は登山鉄道ブロックを示す。

■ 自動運転システムの採用
単純な単線運転では面白くないので、都市部の路面電車路線と合併して、路線の拡大を図った。 まず、麓の駅を出たところにポイントを設置して、都市部と接続する郊外路線を新設し、登山鉄道と路面電鉄の相互乗り入れを実施した。

 .
.
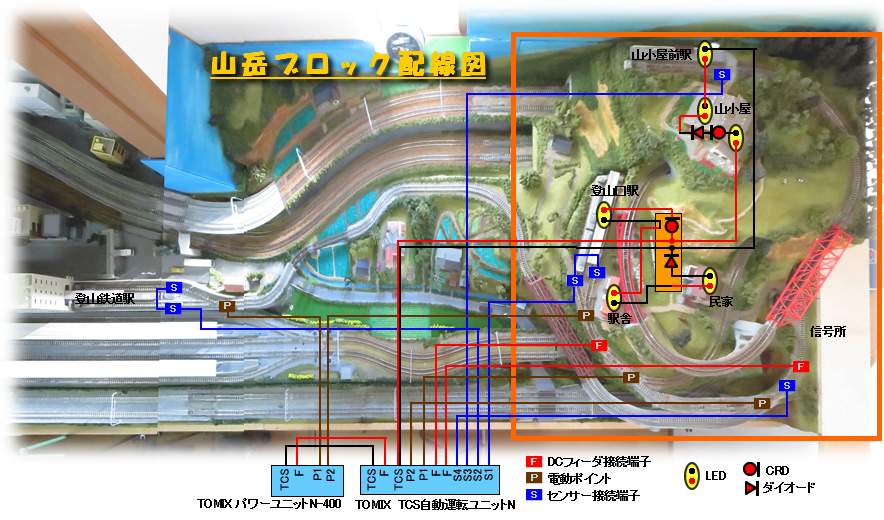
この時の路線図とセンサの配置を上に示す。 パターンはスイッチバックパターンの変形であり、山麓駅と中央駅がスイッチバックポイントであり、山頂駅と街中駅が端末駅である。 山麓駅と中央駅にはホームを複数設けて、手動のポイント操作で走行電車を交代させることが出来る。
わが自動運転システムの歴史は、ここから始まった。
■ レイアウトの変更に合わせる
何年か後、わがレイアウトは1畳程度のレイアウトから、物置部屋いっぱいに広がる大きなレイアウトに発展した。 それまでのレイアウトは解体されたが、登山鉄道ブロックは生き残り、見事にレイアウトの重要ポイントを占めるようになった。

勿論、自動運転システムも生き残った。 路面電鉄は無くなった代わりに、都市部からアプローチできるようにと登山鉄道駅をレイアウト本線のホーム脇に新設した。
■ 制御用コンピュータの導入
上記のTCS自動運転ユニットN を使ったシステムには次のような不満を抱いていた。
- センサの作動が不安定で、時々レールエンドに衝突して、ガリガリやっている。
- 1台の電車しか走行させる事ができない。 電車の交代はふもとの登山鉄道駅と登山口駅のホームに待機している電車に対して、駅での停車中に手動でポイントを切り替える必要がある。
- センサ位置と停車位置の調整は、電車のスピードを適切に調整して置く必要があり、複数の電車の場合には、それに合わせていちいち調整する必要がある。
そこで、この自動運転システムを自作出来ないかと考え始めた。 そこで、まず実施したい内容を列挙することにした。 現在のスイッチバックパターンを生かし、3〜4台の電車を自動運転させる。 とはいってもエンドレスパターンではないので制約があるだろう。
- 足の速い車両や遅い車両を混在させて走らせることが出来ること。 このために、各車両毎の速度調整つまみを設けること。
- 複数の電車を同時に走行可能にすること。
- 運転の一時停止ボタンと運転終了ボタンを設ける。 一時停止ボタンは、脱線等のトラブル発生時に一時的に全電車を停止させ、再開時にはそこから走行を開始させる。 運転終了ボタンは、スタート位置まで自動的に戻って来て運転をすべて終了させる。 スタートボタンも兼ねる。
- システム不具合時でもレールエンドに激突しないこと。
- 通電やポイントの作動状態をパネルやモニタに表示させるといいのだが・・・・・・・・。 希望事項
なかなか欲張った要求であるが、メインの制御コンピュータとして、I/Oポートの数が多い事と、偶然手に入れた RaspberryPi 3 を想定している。 さらに、マルチタスクが実行できるとのことであるので、複数の電車の同時走行の制御が可能ではないかと考えた。
ラズパイを使った制御システムは、単純な構成からプログラムの検討とセンサやアクチュエータの作動を確認しながら検討を進めたが、幾度かの挫折を乗り越えて、この登山鉄道に組み込める自動運転システムとして仕上げることが出来た。


作成した制御盤と基板類の配置を上左に示す。 配線はまだ未実施なのですっきりしているが、全ての配線を実施すると蜘蛛の巣以上になってしまった。 そして制御プログラムの検討のためにテストしていた状況を上右に示す。 こうして出来上がったシステムをレイアウトに設置した。


上左の写真は、システムに合わせて改造した登山鉄道ブロックである。 上右の写真は、制御盤とチューニング実施中の装置である。
しかし、およそ半年を掛けて取り組んできたラズパイを使った自動運転システムであるが、多くの問題を抱えたままで、取り組み意欲を失っていった。 システムは難しい! いくつかの問題点を挙げてみよう。
- やはりポイントの作動が不完全な場合がある。 発生頻度は少なくなったが、100%の信頼性とは言えない状態である。 取り付け状態の歪も考えられるが・・・・(無理な取り付け状態の可能性もあるのだが・・・・・)よくわからない。
- 速度調整にムラがある。 スーと走り出す場合もあるが、モタモタしている場合もある。 ジーと音だけしながらモタモタ走る場合もあるし、トンネル内で立往生も発生している。 どうやら速度信号処理がスムースに行っていないのではないかと疑っている。 SPI通信のタイミング? プログラムの不具合? 並列処理の不具合? 原因特定とその対策は容易ではなさそうだ。
- 入線時の減速処理が不完全でレールエンドに激突する場合もあるのので、センサの問題も有りなのだろうか。
最初の意気込みがだんだん薄れてきた。 短絡的に ラズパイはだめだ、このような自動運転には向いていないのだ、との考えもチラチラしてきたのである。
■ 再度のレイアウト変更にも生き抜く
物置部屋のレイアウトは再度変更され、部屋の周りをぐるりと周回するレイアウトに発展した。 このため、登山ブロックの地下は大改造されたがこの登山鉄道ブロックは生き残った。
そこで、このレイアウト大改造に合わせて、制御するマイコンを Raspberry Pi から、Arduino に変更し、ポイント作動の信頼性向上を考えて、使用するポイントをTOMIX 製からKATO 製に変更し、自動運転システムに再挑戦することにした。



こうして自動運転の新しいプロジェクトがスタートした。
2019/8/16 作成