
![]()
このページは、我が終活の一環として、今まで「自動運転システム」にて記述してきた内容を 再整理し、新しく組み立てた筋道に従って再編集したものです。
このため、過去の報告内容を要約したり、他の項目に分類されていたページを取入れたり、脇道・寄道した内容をカットしたりして記述し直しています。 しかし、昔のページはそのまま残していますので、暗中模索時の状態や、結論にたどり着いた過程、さらには失敗例など、過去の記録も残した状態ですので、参考にして頂けると幸いです。
システムの構成要素 その1
ある目的を達成するためのシステムは、色々な要素を組合わせてシステムとして構成します。 その要素は情報を得るための入力要素や、結果を表示したりアクチュエータとしてアクションを実施する出力要素と、それらをまとめて制御するコントロール機器があります。 これらの要素はシステムが異なっていても共通している使用されている場合が多いのです。 そこで、自動運転システムを構成するために必要な要素を取り上げ、それぞれを説明していきましょう。
***********************************************************
- ■ 1) 車両検知センサ ( 2019/8/16)
 システムを構成する要素として、車両の通過や存在を検知するセンサが欠かせない。車両がどこにいるのか、列車は来たのか、列車は通過したので次の処理をせよとか、こういった色々な情報を提供する手段であり、システムにとっては必修手段である。
システムを構成する要素として、車両の通過や存在を検知するセンサが欠かせない。車両がどこにいるのか、列車は来たのか、列車は通過したので次の処理をせよとか、こういった色々な情報を提供する手段であり、システムにとっては必修手段である。- ■ 2) 通電センサ ( 2019/8/16)
 システムの構成要素として、レールに給電されているか、またその方向はどちらかをチェックしたい場合がある。 このためのセンサを紹介する。
システムの構成要素として、レールに給電されているか、またその方向はどちらかをチェックしたい場合がある。 このためのセンサを紹介する。- ■ 3) 車両速度制御回路 ( 2019/8/14)
 システムの構成要素として、走行させる車両の走行速度を制御する手段が必要である。 その車両速度制御回路についえ説明する。
システムの構成要素として、走行させる車両の走行速度を制御する手段が必要である。 その車両速度制御回路についえ説明する。
システムの構成要素 その2
- ■ 4) ポイントの駆動回路 ( 2019/8/14)
 自動運転システムの構成要素として、ポイント操作は必ずと言ってよいほど使いたくなるアイテムである。 それを駆動するための制御回路をについて説明する。
自動運転システムの構成要素として、ポイント操作は必ずと言ってよいほど使いたくなるアイテムである。 それを駆動するための制御回路をについて説明する。- ■ 5) レールエンドの活用 ( 2019/8/16)
 レールエンドでは確実に停車し、さらに停車したことを知らせるセンサのニーズを感じた。 この時の工夫を紹介しよう。
レールエンドでは確実に停車し、さらに停車したことを知らせるセンサのニーズを感じた。 この時の工夫を紹介しよう。- ■ 6) 信号機を作ろう ( 2019/8/16)
 鉄道模型には欠かせない信号機についても自作してみよう。 仕上がりは市販品と比べれと見劣りするが、点灯具合は負けないし、ニーズに合った信号機がs作れます。
鉄道模型には欠かせない信号機についても自作してみよう。 仕上がりは市販品と比べれと見劣りするが、点灯具合は負けないし、ニーズに合った信号機がs作れます。- ■ 7) コンピュータ ( 2019/8/16)
 システム制御の頭脳となるマイコンと呼ばれているコンピュータについて紹介する。ここでは、Arduino と PICマイコン の概要を説明する。
システム制御の頭脳となるマイコンと呼ばれているコンピュータについて紹介する。ここでは、Arduino と PICマイコン の概要を説明する。
登山鉄道の自動運転システム その1
TOMIXの自動運転ユニットNを使用したスイッチバックパターンのレイアウトについて、複数電車の運行や、電車毎の速度設定が可能なようにと、自動運転システムを自作した。 制御コンピュータはArduino を使用している。
***********************************************************
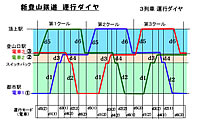
- ■ 1) システムの変遷 ( 2019/8/14)
 この登山鉄道路線は、わがレイアウトでも由緒ある路線なのである。 作っては解体してきたレイアウトに合わせて改造されてきたが、今回は ”自動運転システム" を主眼にして、そのシステムの変遷を追っていく事にする。
この登山鉄道路線は、わがレイアウトでも由緒ある路線なのである。 作っては解体してきたレイアウトに合わせて改造されてきたが、今回は ”自動運転システム" を主眼にして、そのシステムの変遷を追っていく事にする。- ■ 2) システムの構想 ( 2019/8/14)
 レイアウトの大改造に合わせて、制御するマイコンを Raspberry Pi から、Arduino に変更し、さらにポイント作動の信頼性向上のためTOMIX 製からKATO 製に変更して、新たに自動運転システムに再挑戦する。
レイアウトの大改造に合わせて、制御するマイコンを Raspberry Pi から、Arduino に変更し、さらにポイント作動の信頼性向上のためTOMIX 製からKATO 製に変更して、新たに自動運転システムに再挑戦する。- ■ 3) 構成要素と制御回路の検討 ( 2019/8/14)
 制御に必要な入力と出力項目を検討した結果、使い馴れた Arduino UNO が使える事がわかったので、構成要素と制御回路の検討をおこなう。
制御に必要な入力と出力項目を検討した結果、使い馴れた Arduino UNO が使える事がわかったので、構成要素と制御回路の検討をおこなう。
登山鉄道の自動運転システム その1
- ■ 4) 制御部の工作 ( 2019/8/14)
 自動運転システムの頭脳となる制御部の工作を実施する。
自動運転システムの頭脳となる制御部の工作を実施する。- ■ 5) 制御回路の作動確認 ( 2019/8/14)
 制御ソフトの検討に入る前に、ホードとしての電気回路の作動をチェックする。
制御ソフトの検討に入る前に、ホードとしての電気回路の作動をチェックする。- ■ 6) スケッチの記述 ( 2019/8/14)
 ハード回路の動作チェックもなんとか無事に完了したので、いよいよソフトの出番となった。
ハード回路の動作チェックもなんとか無事に完了したので、いよいよソフトの出番となった。- ■ 7) 試運転の実施 ( 2019/8/14)
 Arduino の制御ロジックをスケッチとして記述し、無事書き込みも出来たので、試運転を実施した。 色々なトラブルが発生したが、その対応についても報告する。
Arduino の制御ロジックをスケッチとして記述し、無事書き込みも出来たので、試運転を実施した。 色々なトラブルが発生したが、その対応についても報告する。
ATS列車自動停止システム その1
長いエンドレス・レイアウトでは、同一線路上で複数の列車を同時に走らせてみたくなります。 そこで、閉塞区間を制御するATS列車自動停止システムを自作しました。 特徴は、PICマイコンを使って、制御のための配線を極力少なくする分散制御方式です。 マイコンは8ピン仕様でアセンブラを使って記述しました。
***********************************************************
- ■ 1) レイアウトの概要 ( 2019/8/21)
 模型運転を自動化すると鉄道模型の新たな楽しみ方が味わえます。 その方法は色々ありますが、ここではATS、即ち列車自動停止装置を模したシステムを作って見ることにしましょう。
模型運転を自動化すると鉄道模型の新たな楽しみ方が味わえます。 その方法は色々ありますが、ここではATS、即ち列車自動停止装置を模したシステムを作って見ることにしましょう。- ■ 2) システムの構想 ( 2019/8/21)
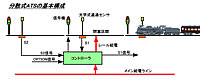 レイアウト改造に合わせて、ATSシステムの基本構成を各閉塞区間内で制御する分散方式に変更することにした。 その構想を検討しよう。
レイアウト改造に合わせて、ATSシステムの基本構成を各閉塞区間内で制御する分散方式に変更することにした。 その構想を検討しよう。- ■ 3) PICマイコンを使おう ( 2019/8/22)
 制御の心臓部であるマイコンを8ピンタイプのPICマイコンを使うことに決めたが、その機種と周辺回路を固めて、必要な部品を揃えることにした。
制御の心臓部であるマイコンを8ピンタイプのPICマイコンを使うことに決めたが、その機種と周辺回路を固めて、必要な部品を揃えることにした。- ■ 4) 信号回路の検討 ( 2019/8/27)
 実際の線路とセンサーを使って、初歩的な制御から少しづつステップアップしていく事にする。 まず制御の入力情報となる通過センサのハード回路と処理ソフトの検証から実施しました。
実際の線路とセンサーを使って、初歩的な制御から少しづつステップアップしていく事にする。 まず制御の入力情報となる通過センサのハード回路と処理ソフトの検証から実施しました。 - ■ 5) 追突を監視するプログラムを検討 ( 2019/8/27)
 ATS列車自動停止システムの中心となる閉塞区間の制御を検討している。 先回にて、通過センサ、信号機、給電制御の作動を確認できたので、これらを組み合わせて後方からの追突を監視するプログラムを検討する。
ATS列車自動停止システムの中心となる閉塞区間の制御を検討している。 先回にて、通過センサ、信号機、給電制御の作動を確認できたので、これらを組み合わせて後方からの追突を監視するプログラムを検討する。- ■ 6) 制御ユニットの工作 ( 2019/8/14)
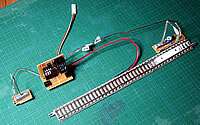 ハード回路と搭載するプログラムの概要が確認できたので、いよいよ制御ユニットの工作を始める。
ハード回路と搭載するプログラムの概要が確認できたので、いよいよ制御ユニットの工作を始める。- ■ 7) 制御ユニットの機能確認 ( 2019/8/14)
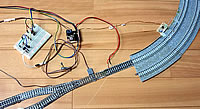
 改良した制御ユニットの機能チェックを実施するため、書斎の床の上にレイアウトを組み立てた。 今回のレイアウトは、駅構内での出発制御と入場制御のチェックを想定して、待避線のあるレイアウトとした。
改良した制御ユニットの機能チェックを実施するため、書斎の床の上にレイアウトを組み立てた。 今回のレイアウトは、駅構内での出発制御と入場制御のチェックを想定して、待避線のあるレイアウトとした。- ■ 8) 入場制御の検討 ( 2019/8/14)
 今回は、駅構内の制御方法として、入場制御の検討を実施した。
今回は、駅構内の制御方法として、入場制御の検討を実施した。- ■ 9) 出発制御の検討 ( 2019/8/14)
 駅構内の制御方法として、先回は入場制御の検討を実施したので、引き続き出発制御の検討を実施した。
駅構内の制御方法として、先回は入場制御の検討を実施したので、引き続き出発制御の検討を実施した。- ■ 10) 閉塞区間の設定と工事の準備 ( 2019/8/30)
 ATS列車自動停止システムの開発も、いよいよ後半の作業に入りました。 今まで検討してきたシステムの要素機器とソフトを使って、実際のレイアウトに組み込んでいく作業となります。 まず最初に閉塞区間を設定し、レイアウトへ取り付けるための準備をしておきます。
ATS列車自動停止システムの開発も、いよいよ後半の作業に入りました。 今まで検討してきたシステムの要素機器とソフトを使って、実際のレイアウトに組み込んでいく作業となります。 まず最初に閉塞区間を設定し、レイアウトへ取り付けるための準備をしておきます。
ATS列車自動停止システム その2
- ■ 11) 冬のゾーンへの設置 ( 2019/8/30)
 ATS制御ユニットをレイアウトにセットする作業の第1弾として、工作が容易であると思われる冬にゾーンから製作を始めました。
ATS制御ユニットをレイアウトにセットする作業の第1弾として、工作が容易であると思われる冬にゾーンから製作を始めました。- ■ 12) 春のゾーンへの設置 ( 2019/8/30)
 ATS制御ユニットをレイアウトにセットする作業として、春のゾーンへの設置工作を実施する。
ATS制御ユニットをレイアウトにセットする作業として、春のゾーンへの設置工作を実施する。- ■ 13) 秋のゾーンへの設置 ( 2019/8/30)
 ATS制御ユニットをレイアウトにセットする作業として、秋のゾーンの製作を行う。
ATS制御ユニットをレイアウトにセットする作業として、秋のゾーンの製作を行う。- ■ 14) 高架部への設置 ( 2019/8/31)
 ATS制御システムの信号機、センサ、および制御ユニットなどの制御機器をレイアウトに設置する作業を実施している。 秋のゾーンに続いて、今回は高架部について報告する
ATS制御システムの信号機、センサ、および制御ユニットなどの制御機器をレイアウトに設置する作業を実施している。 秋のゾーンに続いて、今回は高架部について報告する- ■ 15) ブリッジ部左側の工作と試運転 ( 2019/8/31)
 信号機、センサ、および制御ユニットなどの制御機器をレイアウトに設置する作業を実施している。 高架部に続いて、今回はブリッジ部左側の工作について報告する。
信号機、センサ、および制御ユニットなどの制御機器をレイアウトに設置する作業を実施している。 高架部に続いて、今回はブリッジ部左側の工作について報告する。
- ■ 16) 駅構内の工事 ( 2019/8/31)
 この新ATSシステムの設置作業も最後の山場に差し掛かった。 いよいよ残るは駅構内の工事に入ることにした。 まず、設置に必要な制御機器の Sub-Assy 部品を工作した。
この新ATSシステムの設置作業も最後の山場に差し掛かった。 いよいよ残るは駅構内の工事に入ることにした。 まず、設置に必要な制御機器の Sub-Assy 部品を工作した。- ■ 17) 駅構内の工事 北側制御回路の工作 ( 2019/8/31)
 設置に必要な制御機器の Sub-Assy 部品を工作したので、この部品を取り付ける工作を実施した。 今回は駅の北部の工作を報告する。
設置に必要な制御機器の Sub-Assy 部品を工作したので、この部品を取り付ける工作を実施した。 今回は駅の北部の工作を報告する。- ■ 18) 駅構内の工事 南部制御回路の工作 ( 2019/8/31)
 この新ATSシステムの設置作業も最後の山場に差し掛かった。 残るは駅構内の工事だけとなり、最後の駅の右側、即ち南側の部分の工作状況を報告する。
この新ATSシステムの設置作業も最後の山場に差し掛かった。 残るは駅構内の工事だけとなり、最後の駅の右側、即ち南側の部分の工作状況を報告する。- ■ 19) 試運転の実施 ( 2019/9/2)
 ATSシステムの設置工事が完了したので試運転を実施し、不具合点の抽出と対策を実施した。
ATSシステムの設置工事が完了したので試運転を実施し、不具合点の抽出と対策を実施した。- ■ 20) 仕上げ工作 ( 2019/9/1)
 ATS列車自動停止装置のシステムを完成させることが出来たので、レイアウトとしての仕上げを実施しました。 設置作業による工事で傷んでしまった場所の補修や、修正の実施と、レイアウトの見栄えをグレードアップする工作です。
ATS列車自動停止装置のシステムを完成させることが出来たので、レイアウトとしての仕上げを実施しました。 設置作業による工事で傷んでしまった場所の補修や、修正の実施と、レイアウトの見栄えをグレードアップする工作です。- ■ 21) 12F635 を使用する ( 2019/9/1)
 当初は12F635 を使用予定であったが何故かアッセンブルが出来なかった。そこで12F635 が使えるように再度挑戦した。
当初は12F635 を使用予定であったが何故かアッセンブルが出来なかった。そこで12F635 が使えるように再度挑戦した。
![]()