
HOME >> 鉄道模型自動運転システム > システムの構成要素 レールエンドの活用
システムの構成要素 レールエンドの活用
自動運転用コントローラとしてTOMIX のTCS自動運転ユニットを使用した登山鉄道のレイアウトを作った。 運転パターンは登山鉄道らしくスイッチバックのあるパターンである。 この時、センサの作動が不安定で、時々レールエンドに衝突して、ガリガリやっている場合があった。 センサ位置と停車位置の調整は、電車のスピードを適切に調整して置く必要があり、複数の電車の場合には、それに合わせていちいち調整する必要もあった。
この登山鉄道の自動運転制御を自作のシステムに置き換えようとしたとき、レールエンドでは確実に停車し、さらに停車したことを知らせるセンサのニーズを感じた。 この時の工夫を紹介しよう。
■ TOMIX製レールエンドを活用しよう
 .
.
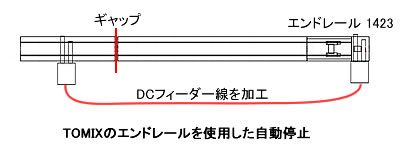
レールエンドでの激突防止策として、TOMIX のエンドレールE(LEDタイプ2・ノイズキャンセラー付 品番:1423 )の説明書を見ていてひらめいたのである。 エンドレール側面にはDCフィーダの差し込み口があり、ここから給電するとエンドの緩衝部に電車が当たった場合に、通電を遮断する機能がある。
この機能を使って、入り口側の線路とこの部分を通電させておけば、エンド部の線路に給電させていることになる。 電車が進入してきて、ストッパに当たると通電を遮断する。 そして、反対方向に向かうように線路に給電されると、電車はそのまま反対方向に発車していくのである。 DCフィーダは何もパワーユニットに接続させる必要は無いのである。 通電状態を表示するLEDがエンドレールに組まれているが見にくいし目立たないので、線路わきに自作すると良いであろう。 到着はダイダイ色、出発は青色のLEDを光らせることも出来そうだ。
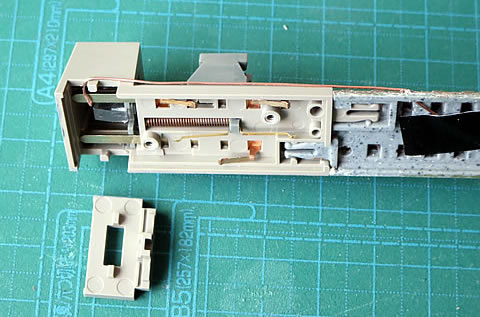
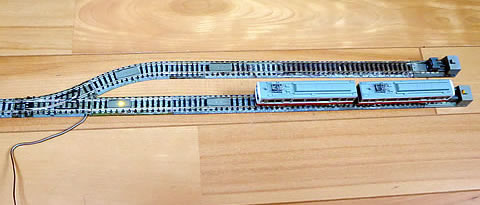
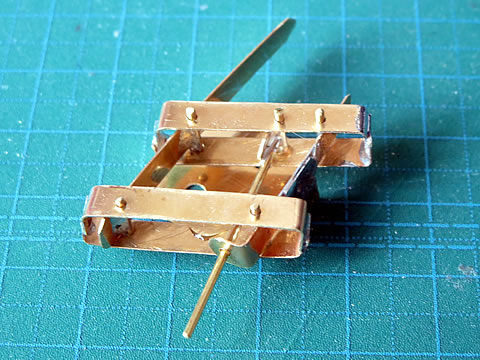
構造を調べ、レールエンドを加工するために分解してみた。
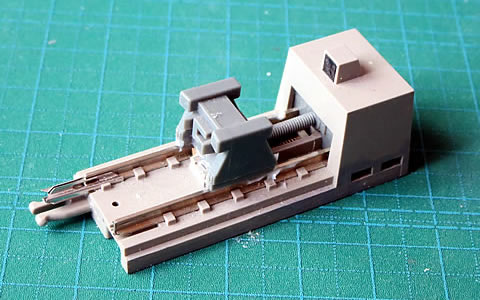
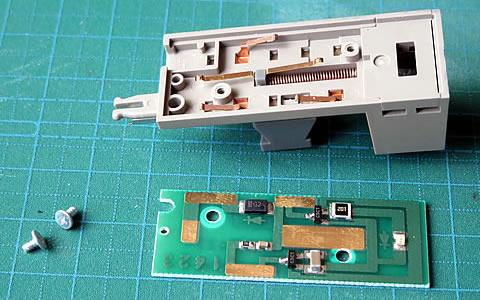
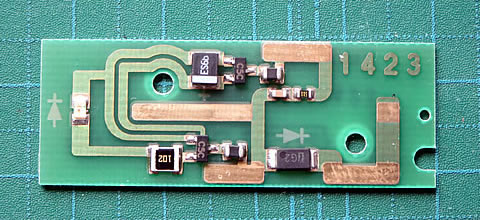
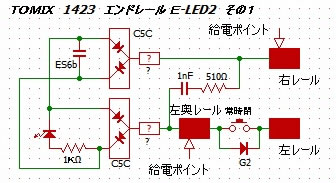
車体を受止めるブロックは、スライド出来るような構造で、バネによって力を受止めるようになっている。 ブロックの底にはスライドする板バネがあり、底面の基板に接触していた。 この部品は同じ品番ながら回路は新旧の2種類あったが、その違いはよく理解できなかった。 その一例を下に示す。 回路パターンから読み取った回路図も示す。 ブロックがスライドすると、給電ポイントと左側のレールの通電が遮断される。 このため、車両が車止めに当たってブロックがスライドすると、左側の通電が切れ列車は停止する。 一方、逆方向にはダイオードが挿入されているので、逆方向は常時通電していることになる。 このため給電方向が反対になると、常時通電しているので出発することが出来る。
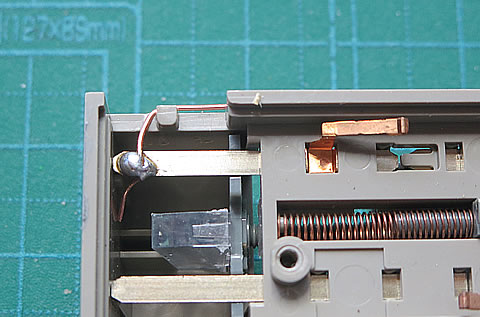
追加工作は、レールエンドの底面のカバーを外し、外側側面を這わせたエナメル線を左奥レールの底面にハンダ付けした。 次にレールの下を這わせたエナメル線の他端を、入口線路の左レール側面にハンダ付けした。 なお、この入口線路のレールは、非通電仕様のレールジョイナーを使ってギャップを設けている。 左レールだけで良いのだ。
.
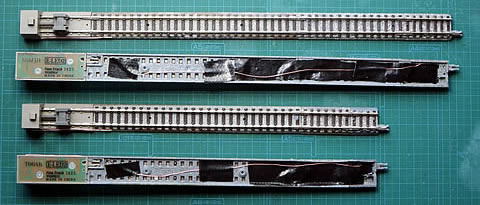
出来上がったレールエンドセットと、通電状態の確認用に踏板型方向指示LED 装置を使って簡単なテスト走行を実施した。 万全の激突防止とは行かなかったが、電車の停止機能は上々であった。 この方式によって、線路終端での自動停止を安全に実施することが可能となった。 実際には次の改良点を付加してシステムを組むことにする。
- 終点近くに通過センサを設置して、入線する電車の速度を落とすように制御させる。
- エンドレールの通電信号を拾い、到着信号として運行システムに生かす。
- TOMIXの踏板型方向指示LED 装置は設置は簡単であるが、遠くからは見にくいのが難点である。 レイアウトの奥の方に設置されていても視認出来るように、LEDで工作する。
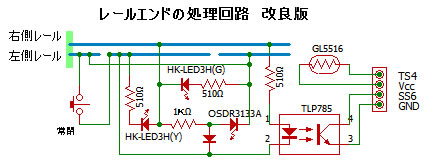
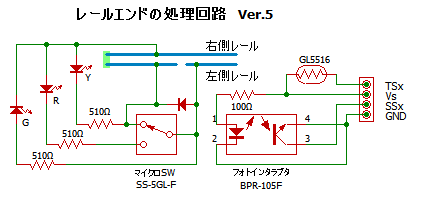
まず、電車が到着したことを知らせるセンサは、フォトカプラを使用して通電が遮断されたことを送信する。 要するに通電センサなのである。 そして、列車を減速させて進入するように制御させるため、入り口近くには通過センサとしてCdSセンサを設置する。 また、LEDを設け、進入時は黄色に点灯し、停止すると赤色とし、出発時には青色に点灯する回路も工夫し、離れたところからでも通電状態を容易に確認できるようにした。 その信号ユニットはレール脇に設置した。
なお、TOMIXの製品説明書には、「誤ってオーバーラン運転したときの衝突衝撃を軽減するもので、車両を衝突させて楽しむものではありません。車両を破損させる恐れがあるため、故意に衝突させることは絶対におやめください。」 との記述がありますので、ここで紹介した使用方法には自己責任で実施してください。
■ 手製のレールエンドを作る
上記のTOMIX製を使用したレールエンド方式では、非力なBトレ動力車では作動しない場合がたびたび発生しました。 スライドするエンドブロックを押す力が弱かったために、車輪をカリカリと空転させた状態が続いていた。 勿論、到着信号も発信できなかった。 さらに、コジレの発生により戻り不良が多発した。 分解掃除やグリースアップなどの手を加えたものの、この様なシステムに使用することを想定した製品ではないために、やはり限界であった。
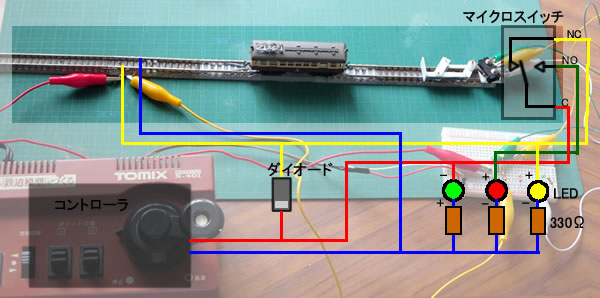
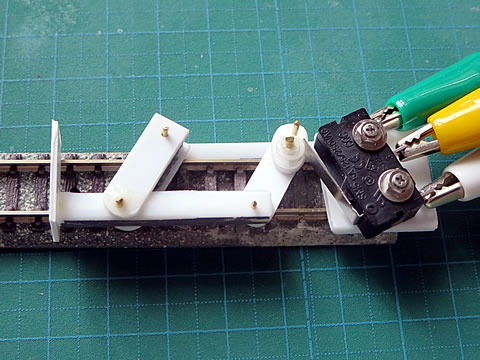
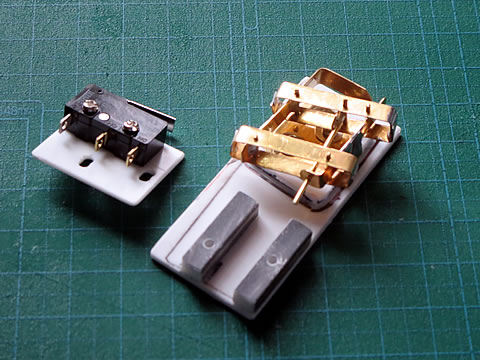
このため、同じ機能を持たせたレールエンドを自作することにした。 一番の課題であったエンドブロックのスライド機構を、簡単な平行リンク構成にして、コジレの少ない機構を使ってみようと考えた。 スイッチはマイクロスイッチを使用し、その試作品とテスト状態を下に示す。
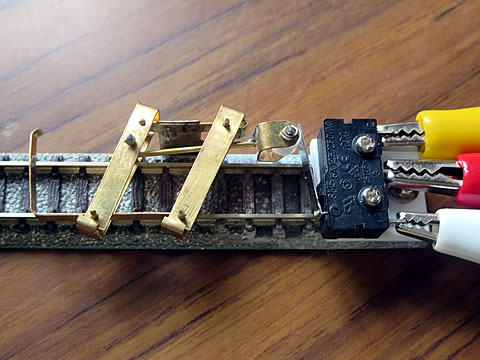
作動は上々であったので、早速部品作りに取り掛かった。 左下が上記の実験に使用した試作1号であり、下右は真鍮板で作った試作2号である。
作るならBトレでも作動するものを作ろうとしているので、現状把握から実施した。 まず試作2号の操作力を測定するために測定方法を工夫した。
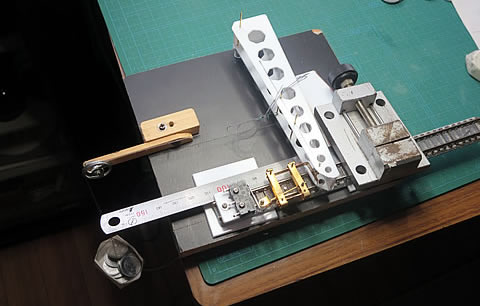
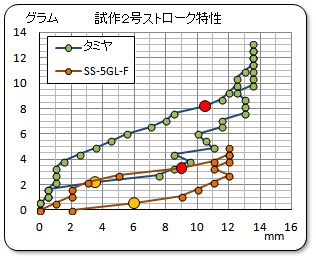
重りは1円玉とし、衝突受けレバーに掛かる力とストロークを測定した。 マイクロスイッチは、タミヤの SN5 75016 と、オムロンの SS-5GL-F を使用して比較した。 作動力とストロークをグラフにしたものを右に示す。 赤丸点はスイッチがON になった時点を示し、黄丸点はOFF になった時点を示している。 マイクロスイッチはスナップ作用を有する構造にしてあるので、大きなヒステリシスを有するが、グラフ上にもしっかりと現れている。 パチン、パチンと作動するようにスイッチとしては重要な特性なのだ。
使用しているBトレの動力車はほとんどが水草の重りなどで補重しており、その牽引力を5グラム前後と設定した。 機構的な作動が確認できたので、マイクロスイッチ単体での操作力を改めて測定したうえで、各部の構成を見直し試作3号機を作った。
平行リンクの製作は、コジレが無い様に調整しながら作り、軽く動くものが出来た。 上左の写真。 これをベースに取り付けた状態をを右に示す。 マイクロスイッチは位置調整が出来るようにして、スイッチングポイントが調整できるようにしている。
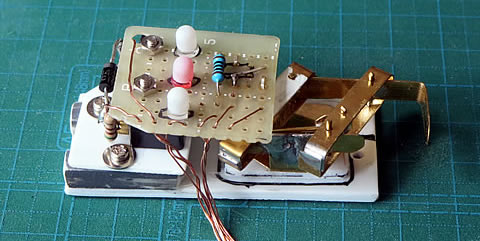
次に電気回路を制作した。 レールエンド部にはマイクロスイッチが鎮座しているので、この上部を使って回路を取り付けることにした。 さらに、レバーの動きをとらえて到着センサとすべく、反射式のフォトインタラプタを使用することにした。 このセンサは自分で赤外線を発し、センサの前に来たマークからの反射光によって、状態を検知するセンサである。 今回は、小型のセンサとして 3.2×2.7×1.4mm のLinkman 製のフォトインタラプタ BPR-105F を使用した。 平行リンク のひとつの腕に白ペンキを塗って反射体とし、その位置を検知してセンサとしている。 回路図は下に示す。 配線類を取り付けて完成としました状態を下に示す。
● 量産試作品4号を作る
最後に、量産用のと言って数台しか製作しないが、最終製作品を作った。 コンパクト化のためにLEDと抵抗はチップ部品を使用した。 試作3号ではプラ板を使ったベースとしたが、面倒なので2号の様にTOMIXの線路をそのまま使用することにする。 組み上がったユニット下に示す。
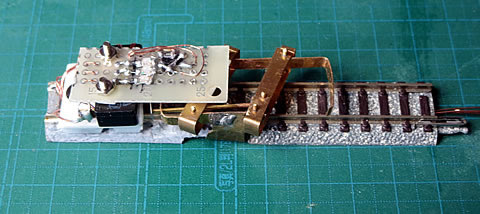

作動を確認するために、先回と同様にテスト回路を構成し、Bトレ電車を走らせて機能を確認した。 テストではちっとした強度テストも実施してみたが、電車を激突させても問題ないようであった。 リンクが適当な弾性を持っているのでうまく衝撃を吸収しているようだし、激突しても脱線しなことが確認できた。



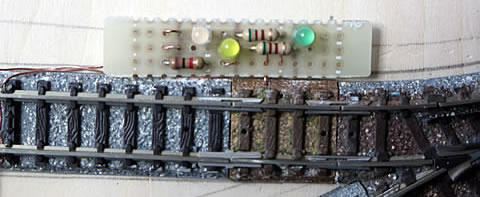
Bトレ車両でも機能することが確認できたし、チップ部品を使うことによってスマートにまとめることも出来た。 但しチップLEDは平面的なので、視認性向上のために 0.3mm のプラ板を被せてカバーの様にしてみた。 その時の光具合を上に示すが、なかなか行けそうなので、ストラクチャに合わせて工夫することにしよう。
2019/8/15 作成