
HOME >> 鉄道模型工学 > モータ特性のモデル化 糸巻式測定装置の開発 その1
モータ特性のモデル化 糸巻式測定装置の開発 その1
またまた、厄介な虫が動き始めました。 以前から宿題にしていた ゛モータの特性を自動測定しよう″ と言うテーマに取り掛かることにした。 回転数の計測までは達成できているのですが、模型用モータの小さなトルクを電気的に検出する方法がまだ見つかっていません。 そこで、今回はこの難題に挑戦しようとするものである。
■ 測定トルクの目標値とアイデァ
Nゲージで使用されているモータの回転トルクの値について、今までの測定データより、実質的には 0~30 gf-mm と考えているので、測定範囲は 0~50 gf-mm とする。そして、測定分解能は 1gf-mm 以下とし、精度は数%程度を希望することにする。
 .
.
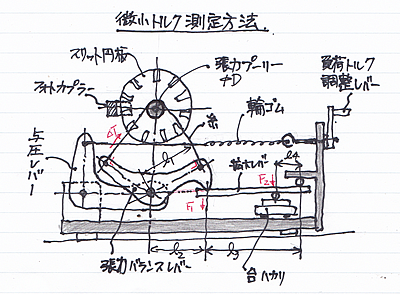
先に報告した回転軸に糸を巻きつけて測定する方法を発展させた今回のアイディアを右の図のようにイラストにしてみた。 プーリーに巻き付けた糸とプーリーとの間に摩擦力を発生させて、糸の両側に発生する張力の差をレバーを使って拡大させて台秤で測定しようとするものである。
この張力の差は右のイラストに示す張力バランスレバーを使えば、張力プーリーからの張力の差をバランスレバーのトルクとして伝達することになる。 すなわち、張力プーリーのトルクを Tp とすると、張力の差 ⊿T は、張力プーリーの直径をφD とするならば
⊿T = Tp ・2/D
となる。 そして、拡大レバーに作用する力 F1 は、その作用点の位置が右の図のように L2 にあるならば、バランスレバーの糸のレバー長さ L1 との拡大率で、
F1 = ⊿T ・L1/L2
となる。 拡大レバーの作用長さを L3 と L4 とすると、台秤に作用する力は、
F2 = F1 ・ L3/L4
となる。 なお、イラスト図では 小文字のエルを使用しているが、文章の中では小文字のエルは数字の1と同じに見えてしまうので 大文字を使用した。
ここで、張力を発生させる方法としては糸の両側を引っ張ってプーリーとの間に摩擦力を発生させればよい。 その方法は、張力バランスレバーの中心を下方に引っ張ることによって実現でき、さらにその力を変化させることによって、糸の張力自身の値を変化させることが出来るだ。 このバランスレバーの中心を押さえるレバー、即ち図に示す与圧レバーを横から輪ゴム等で引っ張れば、その力を変化させることが出来る。 この張力の変化は、結局は張力プーリーの負荷、即ち接続したモータの負荷を変化させることになる上に、発生した負荷トルクを張力バランスレバーや拡大レバーを通して台秤に伝達することになる。
なお、張力バランスレバーと糸とを結ぶ点は、糸とレバーの半径が直角になる位置に設定して、レバーが少し回転してもレバーの有効半径の変化がほとんどないように配慮するようにする。 当然、その他の作用点についても同様な配慮は必要である。 また、荷重を計測する方法は、電気的に実施することが目的であるが、イラストにも示したように、台秤で読み取りながら測定する半自動 でも良しとした。
なお、このイラスト図の原型は、2013年5月の技術メモに記されていたものを、少し修正して書き直したものである。 かれこれ3年も前から温めていたアイディアなのである。 その時の計算メモには、D = 10mm 、L1 = L2 = 50mm 、 L3 = 100mm 、L4 = 20mm と想定して、Max 50 グラムの荷重を測定できるセンサーを探していた。
■ 装置の製作
 .
.
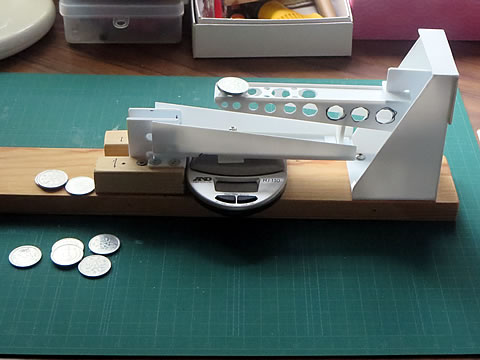
レバー比などの計算をして大まかな設計図を引いた。 それに従って、主に1mm 厚さのプラ板を使って構造体を工作した。 最初に右の写真のような荷重測定用のレバー部を作った。 この構造は2段式の拡大レバーとなっており、支点部はφ3.0mm のアクリル丸棒を使用している。
1円玉(重さが丁度1.0 グラムなのだ!)を使ってレバー比を測った。 10枚まで増減させることを2回繰り返した結果であるが、直線性や再現性もバッチリである。
************ モータ特性を測定しよう その1 構想とセンサ(2016/9/20) を再編集 ********
 .
.
次に、張力プーリー部を工作する。 プーリーの中心となる適切な円筒部材を色々な場所をあさって探し回った。 直径がφ6.0mm で内径がφ5.0 、長さが 16mm のステンレス製?の円筒である。 これは廃棄しようとしたビデオカセットを、興味半分で分解した時に取って置いた部品である。 表面がピカピカで真円度、円筒度などは問題無いと判断する。
もう一つのポイントなる軸受けのベアリングは、ミニ4駆用の部品コーナーから TAMIYA のベラリングを購入して使用した。 さらに軸径を合せるためサイズの異なる軸を組み合わせて、右の写真の様な回転軸を工作した。 軸の左端の白い円筒部は、白黒マーキングを実施して回転センサーの検出部にする。
また、張力バランスレバーと与圧レバーも 1mm 厚さのプラ板を使って工作した。 回転中心軸は線形がφ1.0mm の真鍮線を使った。 そして台や支柱、およびモータ支持台を適当な大きさの木片を使って工作した。
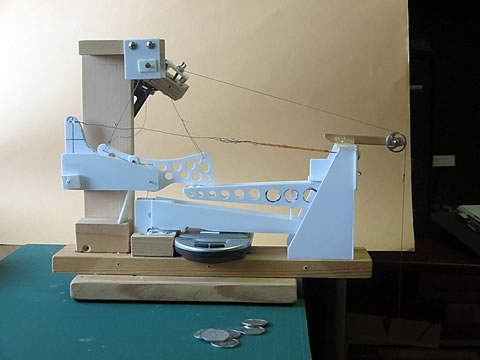
これらを組み合わせた状態を下に示す。 そして作動状態を確認するために、モータを取り付けて機能テストを実施した。

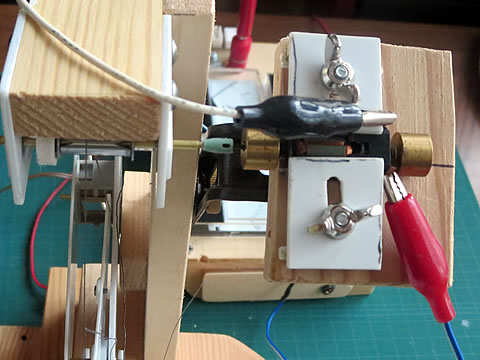
張力プーリーはスムースに回転し、与圧レバーの荷重を増やすと台秤の値が増加するのも確認できた。 数値はともあれ、機能的には作動することが確認できたのので、まずは一安心である。
次に、この張力プーリーに発生する張力の差 ⊿T の値と台秤の荷重の関係を調査する。 レバー関係を所定の位置にセットして、張力プーリーの部分よりテスト荷重を掛けることにした。 テスト荷重としてはいつもの一円玉を重りとして使用する。 その時の様子を右上の写真に示す。
ここでは測定結果を省略するが、データのドリフトが確認され、その原因として拡大レバーの支点にあると推定した。
************ モータ特性を測定しよう その3 トルク測定部(2016/9/22) を再編集 ********
■ 拡大レバーの改良
拡大レバーの支点としてφ3.0mm のアクリル丸棒を使用していたが、点接触とはいえ摩擦の影響が大きいと推定した。 そこで、ピポット軸受け構造を採用しているKATOの台車に目をつけ、これを支点として応用することにした。 台車は、スハ44台車 TR47(品番:5216D)のストック品があったので、これを使用する。 車軸の一方を台に固定するようにアルミ板で工作し、他方の車輪を台秤にせ接触させるようにする。 そして台車のフレームを新しく工作したレバーに肯定した。 下の写真。
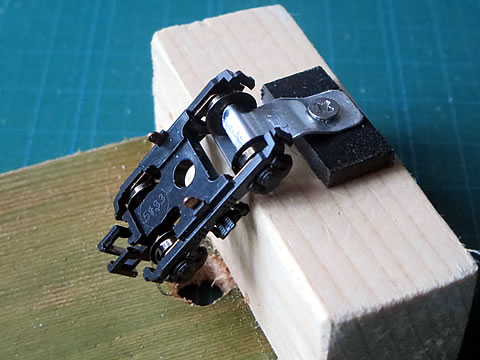

拡大レーバーは重りを付けてバランを取るように工夫し、張力バランスレバーとも短いレバーを作り、φ1.0mm の真鍮線で連結した。 下の写真。


 .
.
リンク系を新しく作り直したので、張力と台秤の荷重の関係を検証する。 方法は先回と同様である。 測定結果の一部を下に示す。
ヒステリシスは少し認められるが、ドリフトは小さくなっていた。
■ 実際のモータを測定してみる
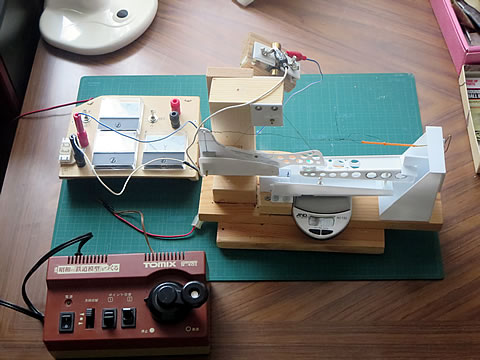
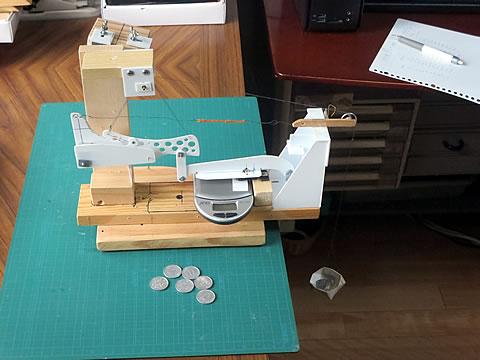
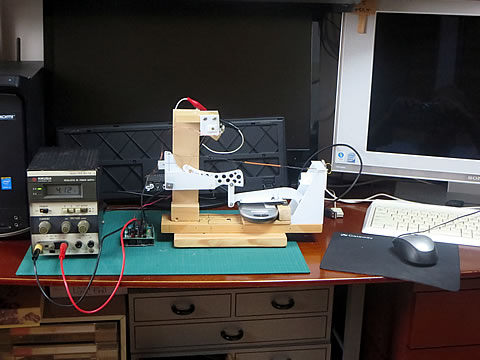
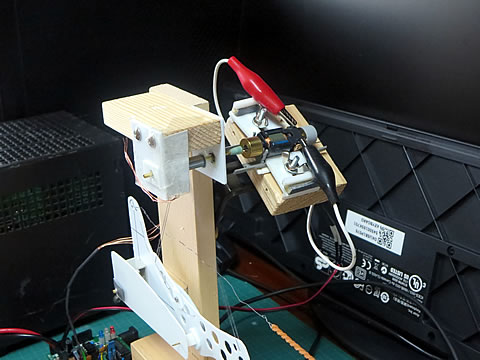
微小トルクは何とか測定できそうなので、実際のNゲージ用のモータをテスト的に測定してみることにした。 測定装置の設置状態を下に示す。 モータへの電力供給は安定化電源を使用し、Arduino と シールドは、モータの無負荷回転数測定装置で作成したシールドを使用した。 回転数センサーは、小型のNo.6 のセンサーを使用し、張力プーリー部につけた白黒マーキングをセンシングするようにした。
 .
.
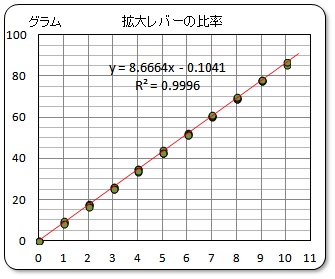
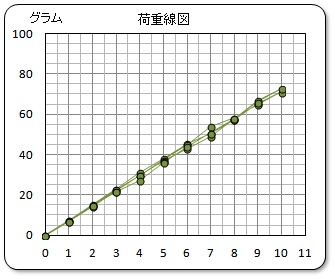
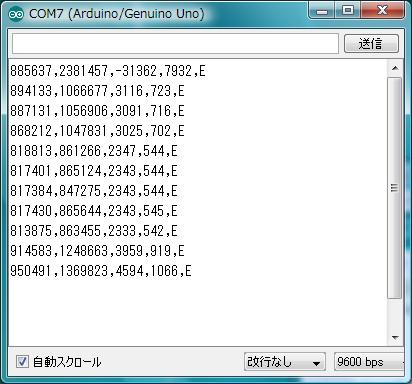
まず、Arduino から送信されてきたシリアルデータをモニタ画面で確認する。 データは、電圧、電流、測定回数、測定時間の値を送信してきている。 右図を参照。 また、台秤のデータも正常に作動していた。 電圧を4ボルトに設定し、与圧レバーの荷重をいろいろ変えながら、モータのトルク測定を実施した。 台秤の値を目で読み取ってExcel に入力してグラフとして処理した。
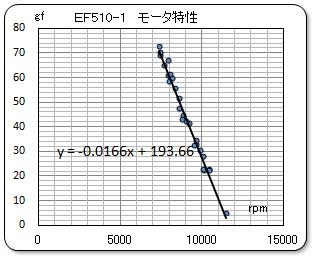
その時の結果を上のグラフに示す。 このグラフを見て思わず興奮してしまった。
大成功だ !
なんと綺麗なグラフであろうか! データはバラツキも少なく一直線に並んでいる。 苦労のし甲斐があったのだ。
************ モータ特性を測定しよう その4 拡大レバー部 (2016/9/25) を再編集 ********
■ ロードセルの導入
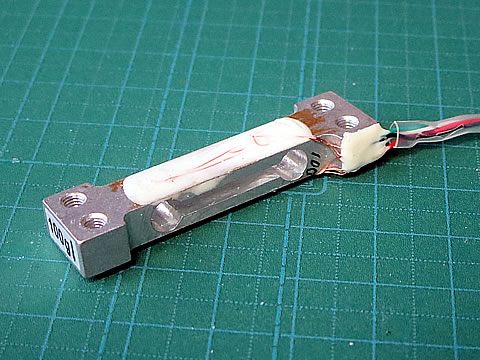
この装置にぴったりのセンサーを Amazon で偶然見つけてしまった。 定格荷重が100グラムのロードセルである。 メーカーは不明で、販売が工場直送消費者家電オンライン小売ショップ - Uxcell 、工場直送価格をウリにする何でもアリの香港の小売ショッピング・モールのもので、Amazon が取り扱っていました。 よく見ると自分が使用している小型の台秤にも使用されているセンサー部品と同じ部品のようであった。 42×12×6mm のアルミ合金製の平行リンクのような片持ち梁に、ひずみゲージが貼ってあり、ブリッジも形成しているようです。 市販の台秤用の部品と思われるので、精度も価格もバッチリですね。
さらにうれしいのは、ブリッジ式歪ゲージのアナログ出力をデジタルに変換してくれるモジュルも売っていました。 \168.- で! 重量計り専用のA/Dコンバータ HX711を使ったモジュールの完成品である。 そしてArduino への入力方法もサンプルとして示されていたが・・・・・・・・・、専用のライブラリーを使う必要がありそうなので、スケッチに四苦八苦するかも?
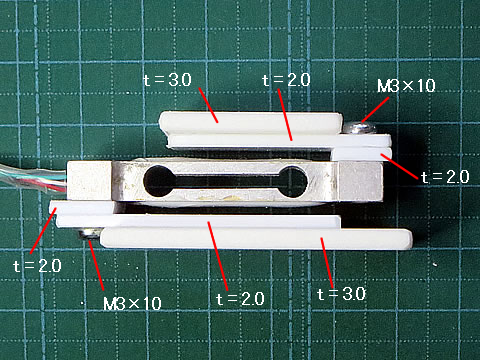
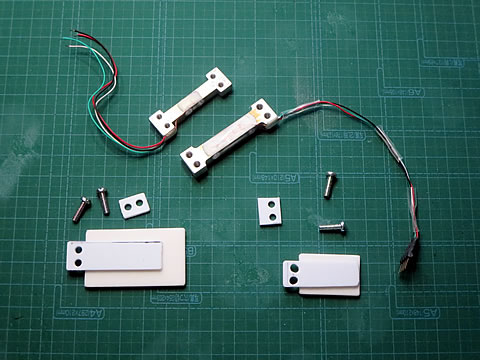
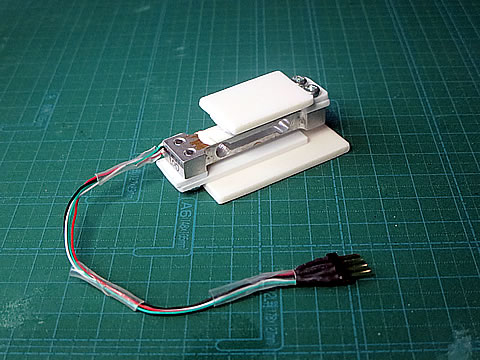
そのロードセルを下左の写真に示す。 実物を手にして、やはりコンパクトであった。 製品名がロードセル、 定格荷重が 100g、 定格出力が 0.5±0.1 mV/V を注文した。このロードセル部品に注目した理由は、片持ち梁であるものの平行リンクのような形状になっているため、荷重面が水平を保ったまま、たわんでいくであろうと予想したからである。 測定する場合の荷重点を固定する必要が無いため、台秤のように測定物をどこに置いても正確に測定出来ると考えたからである。 そこで、上下にプラ板を取り付け台秤の様な構成になるように組み立てた。 下右の写真。
歪ゲージを使用する場合、その電圧出力は小さいので増幅回路が必要であり、出力のアナログデータを処理する回路も必要となる。 しかし、その増幅回路とArduino で処理しやすいようにとA/D変換までまとめて処理してくるモジュールがあったのでそれも入手している。 産業界での荷重や応力の測定では立派な計測器が必須であるが、わがホビーの領域でこのようなモジュールを安く売っていることは、本当にありがたい事である。 注文したのは EasyWordMall の 「 HX711モジュール 秤量センサー 24位精度ADモジュール 圧力センサーモジュール」 (長くて変な名称の部品であるが、意味はよく理解できる。 日本語訳がいまいちですね) である。 uxcell Japan がAmazon のサイト内で販売しているものである。
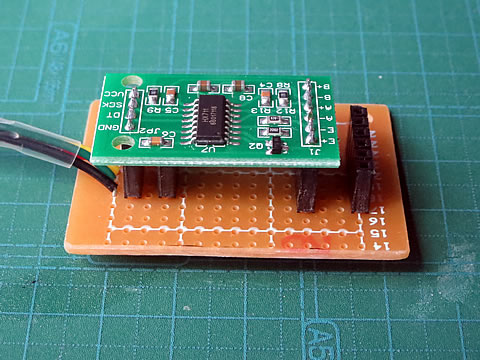
重量計り専用のA/Dコンバータ HX711を使ったモジュールの結線は、電源としての DC5Volt、GND、デジタル出力としてのDOUT、Clock(IN)、の4本が必要である。 今回使用するArduino シールドでは、ポートの空きを考慮してDOUT と Clock(IN) をA3 と A4 ポートを使用することにした。 そしてユニバーサル基板を作りモジュール装着部とし、Arduino との接続部品も工作した。 A3 と A4 ポート、および+5とGND ポートがはなれているので、ユニバーサル基板の切れ端を使って接続端子とした。 下の写真。
#include "HX711.h"
#define START_PIN 2
// HX711.DOUT - pin #A3
// HX711.PD_SCK - pin #A4
HX711 scale(A3, A4);
void setup() {
Serial.begin(38400);
pinMode(START_PIN,INPUT);
}
void loop() {
int start;
start = digitalRead(START_PIN) ;
while (start == HIGH) { // スタートボタンを待つ
start = digitalRead(START_PIN) ;
}
Serial.print("read: \t\t");
Serial.print(scale.read());
Serial.print(" \t\t");
Serial.print(scale.read());
Serial.print(" \t\t");
Serial.print(scale.read());
Serial.print(" \t\t");
Serial.print(scale.read());
Serial.print(" \t\t");
Serial.println(scale.read());
delay(500);
}
このモジュールを制御するため専用のライブラリーが用意されているので、aitendo のホームページより参考コードをダウンロードして、ライブラリに hx711.cpp と hx711.h をセットした。 そして、サンプルスケッチの SerilScale.ino を参考にして、ロードセルの較正用スケッチを作成した。 スケッチの内容を右に示す。
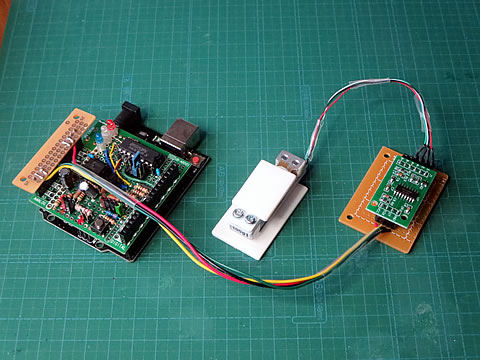
測定を指示するボタンを押すと、データを読み取って送信し、これを5回繰り返して、また待機状態に入るように設定した。 #include した HX711 のライブラリーによってA/D変換された生データを送信するように設定した。 較正実験の様子を下に示す。

 .
.
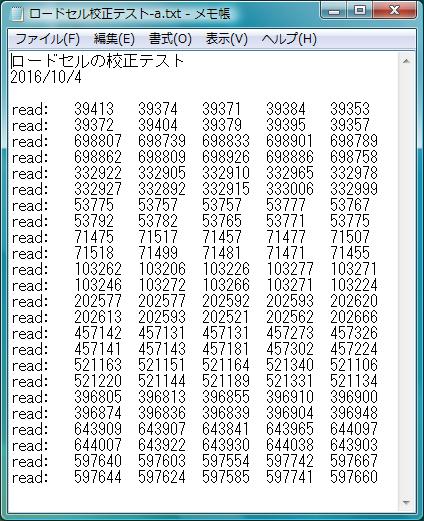
分銅代わりの重りを台秤で計量して値をメモし、それをセンサーの上に置いてボタンを押す。 そしてシリアルモニタに表示された値を、メモ帳にコピペして行く。 シリアルモニタの様子を右に示す。
丁度良いおもりが無い時は、上の写真の様に水草の重りなどを組み合わせて測定した。 一つの重りで、続けて2回測定しており、10個のデータを取得した。 これによって測定値のバラツキや安定性をチェックしようとしたものである。
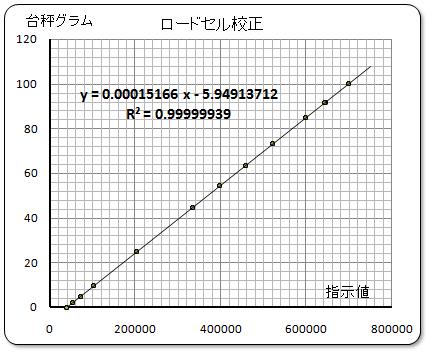
このデータをまとめてグラフ化したものを下に示す。 グラフは縦軸に重さを示し、横軸は送信されてきた生のデジタルデータ値(指示値と呼ぶことにする)を示す。
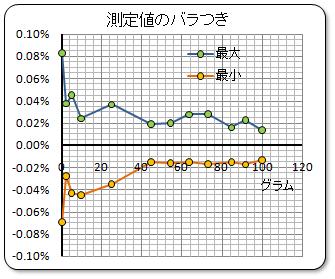
プロットした結果は、近年に無い見事なデータである。 直線性やバラツキなどホビーにとっては申し分のない性能と判断する。 ゼロ点については、計測前にチェックすればよい事なので、近似式の比例乗数が重要なのである。 同じ重りで10個のデータを得ているが、その平均値を求め、10個のデータの内、平均値から最も離れたプラス値とマイナス値を求めたのが、左上のグラフである。 これを測定値のバラツクとするならば、0.02~0.04%と極めて小さなバラツキに収まっていることが分かる。
************ モータ特性を測定しよう その5 ロードセル (2016/10/5) を再編集 ********