
�@�@HOME >> �S���͌^�H�w�@>�@���[�^�����̑���ƃ��f�����@���[�^�萔�̐�����@
���[�^�����̑���ƃ��f�����@�@���[�^�萔�̐�����@
�Ȃ��A���[�^�̑���ɂ������̂��H
�@�䂪�������ł͖��d�ɂ��S���͌^�̓��͎Ԃ̃��f�����ɒ��킵�Ă��܂��B�@�����āA�O��ł��������[�^�P�̂̓���������o����悤�ɂȂ����̂ŁA���̑���f�[�^���g���āA�g���N�萔�Ƃ��t�N�d�͒萔�Ȃǂ𐄒肵�A���f�����̓��������o�����ƍH�v���Ă��܂��B�@���̕��@�́A���[�^�̊O�����瑪��o����������g�p���A���[�^�̋@�\�����Ă���e�萔�𐄒肷����@�ł��B�@���[�^�̌����������ł͖����̂ŁA�����I�Ȍ�������Nj�������̂ł͂���܂��A���[�^�ɋ������ꂽ�d���Ɠd���l����щ�]������A���[�^�̏o�̓g���N���v�Z�o����Ηǂ��ƌ�������ł��B
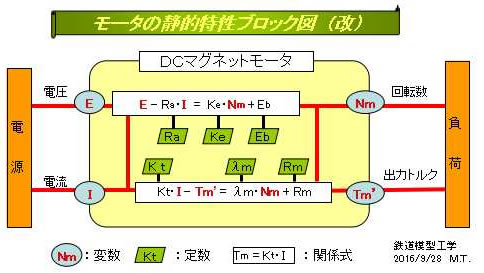
�@����ɁA������̖ړI�́A���͎Ԃ̃u���b�N�{�b�N�ɂȂ��Ă���萔�̐���ł���B�@�u���荀�ڂ̒lj��@���s���̃��[�^��]���ƒ[�q�d���𑪂낤�v�Ő��������悤�ɁA���[�^�P�i��Ԃł̓d���Ɠd���A����щ�]���ƃg���N�𑪒肵�ă��[�^���\������萔�����炩���ߋ��߂Ă����A���͎Ԃɑg�ݍ��܂ꂽ��Ԃł��A���s���̓��͎Ԃ̃��[�^�[�q�d���Ɠd���A����у��[�^��]����胂�[�^�g���N���Z�o���邱�Ƃ��\�ƂȂ�̂��B�@����ƁA�����@�u���b�N�̓��o�͂̂S�ϐ����������邱�ƂɂȂ�A�`�B������E�H�[���M���̗l�q���𖾂ł���A�u���b�N�{�b�N�̒��g��`���L�͂ȓ���Ă���������̂ł���B
���@�萔�̐���̕��@
�@ �@.
�@.
�@�������l�ȃC���X�g���Љ�����A���̃C���X�g�������C������B�@�ϐ��̊W���������ɂ��āA�O���瑪��ł���ϐ���Ԑ��Ŏ������B�@�����Ă悭����ƁA�S�[�q����ϐ��͊W�����͂���ŁA��̃O���[�v�ɕʂ�邱�Ƃ�������B�@�����A�d���E�d���Ɖ�]���A����сA�d���E�o�̓g���N�Ɖ�]���̃O���[�v�ł���B
�@�O�҂͒萔 Ra�AKe�AEb ���W���A���̕ϐ��Ƃ͓Ɨ����Ă��邱�Ƃ�������B�@�܂��A��҂ɂ��Ă����l�ɁA�萔 Kt�A��m�ARm �Ƃ��W���ď�̕ϐ��Ƃ͓Ɨ����Ă���B
�@����́A�O�҂��d���Ɋւ���W���ł���A��҂��g���N�Ɋւ���W���Ȃ̂ł��邪�A�E�Ɏ������C���X�g�̒��̎�������ƁA�E�ӂ� Nm �Ɋւ���ꎟ���ł���A���ꂼ��̌��z�� Y �ؕЂ����߂����萔�������Ă���B
�@�܂��A���ӂ͓�̕ϐ��ƈ�̒萔���琬���Ă���̂ŁA���̒萔�����肷��A���ӂ͑���f�[�^���Ɍv�Z�o����̂ł���B�@���̌v�Z���ꂽ�f�[�^���A Nm �������Ɏ�����U�z�}�Ŏ����A���̌��z�� Y �ؕЂɂ��Ĉꎟ�ߎ�����萄��ł���̂ł���B�@�����A���ӂ̒萔�����肷��A����ɑΉ����āA���̓�̋��߂����萔�ڎ������Ă���̂ł���B�@���̏�ɁA��̃O���[�v�͂��݂��ɓƗ����Ă���̂ŁA���ꂼ��̃O���[�v�P�ƂŌv�Z�o����̂ł���B
�@���ɁA���肵����̒萔�Ƌ��߂�ꂽ��̒萔�̃Z�b�g���A�ǂꂾ�����ۂƍ��v���Ă���̂��́A���߂��萔���g���Čv�Z���ꂽ�v�Z�l�Ǝ����f�[�^���r���āA���̑�����`�F�b�N���čs���A�m���炵�����m�F�ł���̂ł���B�@�O�҂̓d���Ɋւ���W�ł͉�]�����A��҂̃g���N�Ɋւ���W�ł͏o�̓g���N�����̕]�����ڂɂ��āA�v�Z�l�Ǝ����l�Ƃ̔�r�����{����A���߂�萔�̊m���炵�����m�F�ł���̂ł���B
�@���̗������g���āAEXCEL�Ōv�Z���Ȃ���A�S�̕ϐ����A�U�̒萔�𒀎��ߎ��@���ǂ��̎�@�Ő��肷�邱�Ƃ��o����̂ł���
���@��̓I�Ȏ菇
�@���[�^�P�i�ő��肵�������f�[�^�����ƂɁA���[�^�̓��������߂�U�̒萔��e�Ղɐ��肷����@���Љ�悤�B
�@�@.
�P�j�@�g���N�Ɋւ���W������萔 Kt �ARm �A��m �̍œK�l�����ꂼ�ꐄ�肷��
�@��]�� Nm �A�d�� I �A�o�̓g���NTm�f�̊W���AKt �ARm �A��m �𐄒��������̂ł���B�@����́A���肳�ꂽ�d�� I �Ɖ�]��Nm ���A���[�^�̊W���Ő����������i11�j�Ǝ��i12�j���g�p���ďo�̓g���NTm�f���v�Z����B�@���̌v�Z���ꂽ�l�� Tm�f�̎����l�Ƃ̔�r�ɂ��A�����Ƃ��悭���v���� Kt �ARm �A��m �����߂���̂ł���B�@�������A���̂R���̒萔 Kt �ARm �A��m ���ɐ��肵�Ȃ���Ȃ�Ȃ��̂ł��邪�A���̑g�ݍ��킹���l����Ɩc��ȃP�[�X�ƂȂ��Ă��܂��B�@�������A ���[�^�������g���N�̌v�Z�������p����A���̐��������ł����̂ł���B
- �܂��A���[�^�������g���N�́A�O�q�̇C���ŕ\�킳��邪�A���i11�j���g���� Tm ����������ƁA
�@�@�@�@
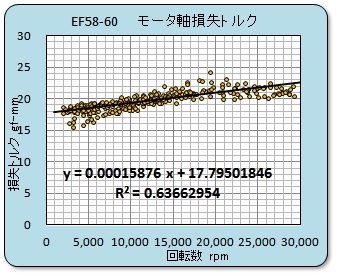
�ƂȂ�B - �����ŁAKt �����̒l�ɐݒ肵�A�d�� I �Əo�̓g���N Tm�f�̑S�Ă̎����l���g���āA��̎��̉E�ӂ��v�Z���A���̌��ʂ����[�^�������g���N�Ƃ��ăO���t������B�@���̎��ɉ����ɂ͉�]��Nm �̎����l��p���Ă���B
- ���̈����E�̃O���t�Ɏ����B
- ���̃v���b�g�_���ߎ������ƁA�����ߎ����̌��z�� �x �ؕЂ̒l�͏�L�̎��Ɏ�����Ă���l�ɁA���z����m ���A�x�ؕЂ�Rm �̒l���_�C���N�g�Ɏ����Ă���ł���B
- ���̃O���t���g�p����ƁAKt �����̒l�ɐݒ肷��A����ɑΉ������œK�ȃ�m ��Rm ��EXCEL �������I�Ɍv�Z���Ă����̂ł���B
- �����ŁA���̒萔����l �i Kt �ARm �A��m �j �̃Z�b�g�ƁA�d�� I �A����щ�]��Nm �̎����l��p���ďo�̓g���NTm�f�̌v�Z�l�����L�̎����g�p���Čv�Z����B
�@�@�@�@
- �����āA���肵���萔�Ōv�Z���ꂽ���̌v�Z�l�Ǝ��ۂ̎����l�Ƃ��r�����邱�Ƃɂ��A �����Ƃ��悭���v���� Kt �ARm �A��m �����߂���̂ł���B
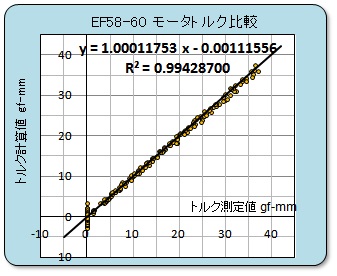
- ���̕]���ړx�Ƃ��ẮA����܂��A�o�̓g���NTm�f�̌v�Z�l�Ǝ����l�Ƃ��AX-Y�O���t�ɕ\�����Ă��̑��ւ����߂邱�Ƃɂ���āA����l�̃}�b�`���O���]���o���̂ł���B
- ����X-Y�O���t���E�Ɏ����B
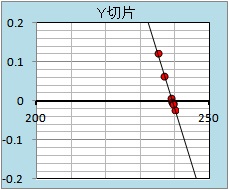
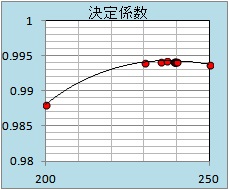
- �����āA�E�̃O���t�̌��z�AY�ؕЁA����ь���W�� R2 �̒l���O���t�����A�����v�Z�̂��߂̕����t�����r�W���A���ɂ������̂����Ɏ����B �@�����ɂ͉��肵���萔 Kt �̒l������Ă���B
- ���z��Y�ؕЂ͒����I�ɕω����A����W�� R2 ��2���Ȑ��������Ă��邪�A �v�Z�l�Ǝ����l�̃}�b�`���O���]������ɂ́A���z�͂P�F�P�ɑΉ����Ă��邱�ƁA�����P�ɍł��߂����ł���A�܂�Y�ؕЂ̓[���_�ɍł��߂����A����Ɍ���W�� R2 �� 1.000 �ɍł��߂����Ƃ��]���̃|�C���g�ł���B
- ���́A�]���|�C���g�������ɐ�������x�X�g�ł邪�A�����ł͌��z�AY�ؕЁA����W���̏��ɗD�揇�ʂ����Ĕ��f���邱�Ƃɂ����B
- �Ȃ��A�����g���N�̃O���t�ƃg���N��r�̃O���t�ɂ����āA���̌��z��Y�ؕЁA����ь���W�� R2 �̌v�Z�́AEXCEL�̒��̊��𗘗p���Ď����I�Ɍv�Z����悤�ɂ����B�@����ō�ƌ������i�i�Ɍ��サ���̂ł���B
- ���z�̌v�Z�́A�@�@�@ = INDEX(LINEST(H9:H277,F9:F277 ),1,1)�@�@�Ŏ��{���A
- Y�ؕЂ̌v�Z�́A�@�@ = INDEX(LINEST(H9:H277,F9:F277 ),1,2)�@�@�Ŏ��{���A
- ����W�� R2 �̌v�Z�́A�@ = INDEX(LINEST(H9:H277,F9:F277,TRUE,TRUE),3,1) �@�@�Ŏ��{�����̂ł���B
 �@
�@ �@
�@
�@�萔����̕��@�́A������ �蓮�������v�Z�@ �ł���B�@����萔������肷��AEXCEL�Ŏ����I�Ɍv�Z���ăO���t�����Ă����̂ŁA�]�����ڂɂ��߂��l�͂ǂ���̕������������Ă����̂ł���B
�Q�j�@�d���Ɋւ���W������萔 Ke �ARa �AEb �̍œK�l�����ꂼ�ꐄ�肷��
�@�����l����萔 Ke �ARa �AEb �ɂ����Ă͂߂āA�f���^�d���Ə���ɖ��Â������A���̗v�f���v�Z���邱�Ƃɂ���āA�����̒萔�����l�ɊȒP�ɍœK�l������o����B
�@

�@�@�@�@�@�@
- ���i12�j�Ǝ��i13�j���A�t�N�d�� e ����������ƁA
�@�@�@�@
�ƂȂ�B�@���̎��̈Ӗ����镨���I���e�͗ǂ�������Ȃ��̂ŁA�f���^�d���Ə���ɖ��Â������A�O�L�ƑS�������`�ԂƂȂ邱�Ƃ�������B - ������R Ra ��P�Ȃ��R�ƍl����Ȃ�ARa�EI �͓d�� I �ɂ��d���~���ł���B�@�]���ēd���͂���ȊO�̗v�f�ɂ��d���~���A���Ȃ킿�d���̑������ɂ�����̂ŁA��L�̃g���N�����Ɠ����悤�ɂȂ�͓̂��R��������Ȃ��B�@���̑����i�H�j�ɂ́AKe�ENm �Ŏ������t�N�d�͂��W���Ă���̂ł���B
- �����ŁARa�����̒l�ɐݒ肵�A�d�� I �Ɠd�� E �̑S�Ă̎����l���g���āA��̎��̍��ӂ̌v�Z�ɂ��f���^�d�������߂ăO���t������B�@���̎��ɉ����ɂ͉�]��Nm �̎����l��p���Ă���B
- ���̈����E�̃O���t�Ɏ����B
- ���̃v���b�g�_���ߎ������ƁA���̋ߎ����̌��z�Ƃx�ؕЂ̒l�͏�L�̎��Ɏ�����Ă���l�ɁA���z��Ke ���A�x�ؕЂ� Eb �̒l���_�C���N�g�Ɏ����Ă���ł���B
- �{���́A Eb �̒l�A���Ȃ킿�u���V�ڐG���̓d���~���ɂ��}�C�i�X�l�͖������ł���B�@�������A������]���̔���`�����̉e���ɂ��A�f�[�^�I�ɂ̓}�C�i�X�ƂȂ��Ă��܂����B�@��������P����ɂ́A20,000 rpm�ȏ�̃f�[�^���l�O���N�g���Čv�Z������Ƃ悢�̂ł���B
- ���ɁA���̒萔����l �iRa�AKe �AEb �j �̃Z�b�g�ƁA�d�� E �Ɠd�� I �̎����l��p���ĉ�]��Nm �̌v�Z�l�����L�̎����g�p���Čv�Z����B
�@�@�@�@
- �����āA���肵���萔�Ōv�Z���ꂽ���̌v�Z�l�Ǝ��ۂ̎����l�Ƃ��r�����邱�Ƃɂ��A �����Ƃ��悭���v���� Ra�AKe �AEb �����߂���̂ł���B
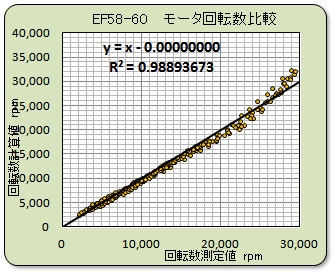
- ���̕]���ړx�Ƃ��ẮA����܂��A��]��Nm �̌v�Z�l�Ǝ����l�Ƃ��AX-Y�O���t�ɕ\�����Ă��̑��ւ����߂邱�Ƃɂ���āA����l�̃}�b�`���O���]���o���̂ł���B
- ����X-Y�O���t���E�Ɏ����B
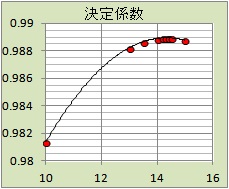
- �����āA�E�̃O���t�̌��z�AY�ؕЁA����ь���W�� R2 �̒l���c���ɂ��A�����ɂ͉��肵���萔 Ra �̒l������ăO���t������ƁA�����v�Z�̂��߂̕����t�����r�W���A���Ɏ��������o����̂��邪�E�E�E�E�B
- �������A���̓d���Ɋւ��鎮�̏ꍇ�́A�t�N�d�͂̉e�����傫�����߂ɁAExcel �̎����v�Z�ł́A�w�ǂ����z�͂P�ɁAY�ؕЂ͂O�ƂȂ��Ă��܂��̂ł���B�@�]���āA�]�������炢���ڂƂȂ��Ă���B
- �����ŁA�f�[�^�̃o���c�L�����v�Z���ꂽ���W��R��2��́A����W���ƌĂ�Ă��鍀�ڂ�]�����ڂƂ��Ď��{�����B�@1.0 �ɍł��߂� Ra �̒l�𐄒�l�Ƃ���̂ł���B
�R�j�@���肵���萔�l�̌���
�@��L�̕��@�ŁA�U�̒萔�𐄒肵�����A�ʂ����Ė{���ɓI���l�ł���̂��ǂ��������Ēu���K�v������B�@�����ŁA���ۂ̑���O���t�̏�ɁA���肵���萔�l���狁�߂����}�������Ă݂āA����f�[�^�Ƃǂꂾ�����v���Ă���̂����Ă����ƈ��S�ł���B
���@�����ד����̔�r
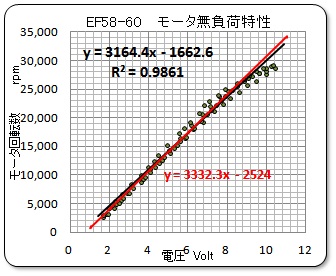
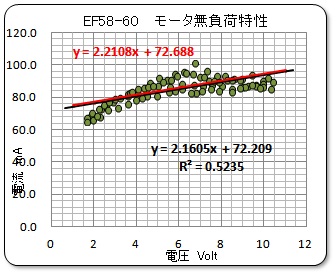
�@�܂��A���[�^�P�̂ł̖�����Ԃł̑���f�[�^���g���āA�����l�ƌv�Z�l�̔�r�����{����B
- ��]�� Nm �̌v�Z���́A���i11�j�A�i12�j�A�i13�j�A�i18�j���A�d�� I ���������ATm�f= 0 �������Ƃ��Ď�������B
�@�@�@�@
- �d�� I �̌v�Z�������l�ɁA���i11�j�A�i12�j�A�i13�j�A�i18�j���A��]�� Nm ���������ATm�f= 0 �������Ƃ��Ď�������B
�@�@�@�@
- ���̃O���t�ɂāA�v�Z�l��Ԑ��ƐԎ��Ŏ����B�@�����f�[�^�Ƃ悭���v���Ă���̂ŁA���肵���萔���m���炵������������B
�@�@.
 �@
�@
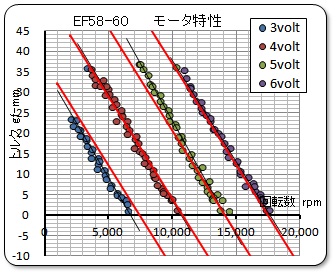
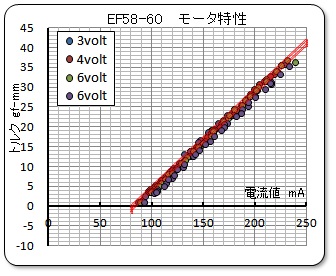
���@���[�^�̃g���N�����̔�r
�@���l�ɕ��ׂ����������̃f�[�^����r����B
- �o�̓g���N Tm�f �̌v�Z���́A���i11�j�A�i12�j�A�i13�j�A�i18�j���A�d�� I ���������Ď�������B
�@�@�@
- �o�̓g���N Tm�f �̌v�Z���́A���i11�j�A�i12�j�A�i13�j�A�i18�j���A��]�� Nm ���������Ď�������B
�@�@�@
 �@
�@
���@���ۂ̌v�Z���@
�@���ۂ̌v�Z���@�ɂ��Đ�������B�@�v�Z�V�[�g�� Excel ���g�p���ĕK�v�ȗ��Ɍv�Z���ߍ��݁A�v�Z���ꂽ�l���O���t�ɕ\������B
�@�@.
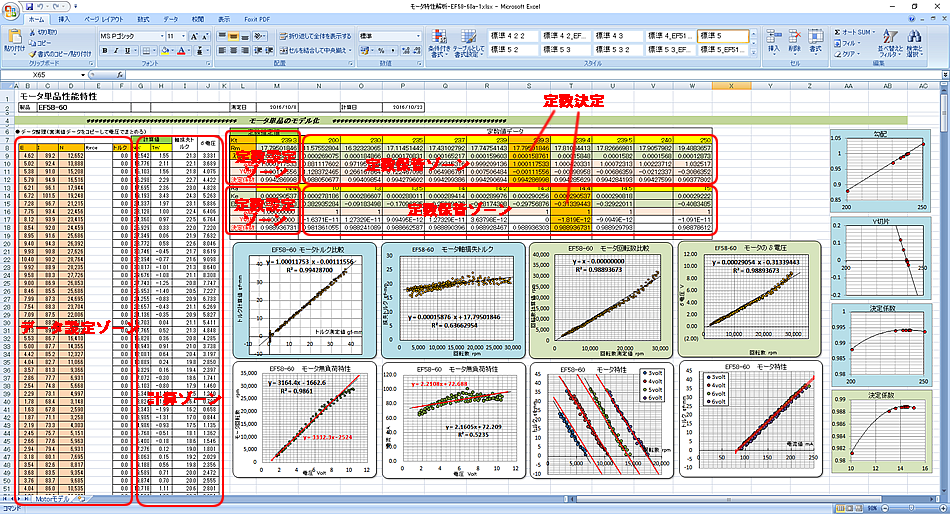
�@���̌v�Z�V�[�g�́A����f�[�^���y�[�X�g����]�[���A���̃f�[�^����K�v���ڂ��v�Z����]�[���A���肷��萔��ݒ肷��]�[���A�����̒l���������Ēu���ۊǃ]�[���A����ь��肵���萔��������l�Ɣ�r���邽�߂̌v�Z�]�[���i�}�̉��̕��ɉB��Ă��܂������E�E�E�E�E�j�A�W����O���t�̕\���]�[�����琬�藧���Ă���B
�@���́A�v�Z�菇���������B
- ����f�[�^�����ăf�[�^�ݒ�]�[���ɓ\��t����B
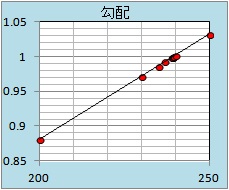
- �萔�ݒ�]�[���ɁAKt ���邢�́ARa �̒l��K���ɐݒ肵�ĊW����O���t�̗l�q������B�@����ő�̗̂l�q��c��������A�����߂̐��l�Ƒ傫�߂̐��l�������Ē萔�ۊǃ]�[���̗����ɒl�������y�[�X�g���Ēu���B�@
- �ݒ肷��萔�𒆊Ԃ̒l�ɃZ�b�g���ĕ]�����ڂ̓��e���`�F�b�N����B�@�����Ē萔�ۊǃ]�[���ɒl���y�[�X�g����B
- �����ĕ]�����ڂ̃O���t�����Ȃ���A�ݒ肷��萔�͈̔͂����߂Ă����B�@�蓮�̒����ߎ��@�ł���I
- �g���N�Ɠd���̊W���́A���ꂼ��Ɨ����Ă���̂ŕʁX�Ɍ������čs���Ηǂ����A����͑��W�����Ȃǂ������I�Ɍv�Z����悤�ɂ����̂ŁA�y�X�ł���B
- �n�j�ł���A���[�^�����△���ד����̃O���t�ɂāA�����l�ƌv�Z�l�̃}�b�`���O����`�F�b�N����B
- ���Ƃ��ƁA���[�^�쓮�̕s���萫��A��������������@�̉e���ŁA����f�[�^���g�̃o���c�L��M�����ւ̋^��Ȃǂ�O���ɂ����āA�قǂقǂ̃}�b�`���O��ŗǂ��Ƃ��ׂ��ł��傤�B
���@�ӊO�Ȏ��n
�@���̕��@�Ŏg�p�����u���[�^�������g���N�v�Ɓu���[�^�̃d���v�̃O���t�����Ă���ƁA�V���Ȕ��������鎖�ɋC���t�����B
�@�Ⴆ�ΑO�҂́u���[�^�������g���N�v�O���t����́A���[�^���g�̑����g���N���ӊO�Ƒ傫������������B�@�o�̓g���N��30�`40 gf-mm �ɑ��āA�����g���N�� 20 gf-mm ���L��̂ł���B�@���[�^�̉�]�q�����������g���N�̖�1/3�͎����̖��C�Ƃ��ď����Ă���E�E�E�E�E�E�E�H�@���̌����͐����q�̃u���V�����̖��C�ł͂Ȃ����Ɛ��肷��̂ł��邪�A�s�m���ł���B�@�܂��A�Q�O�C�O�O�O rpm �ȏ�ł͓������ω����Ă���̂ŁA���C���ۂ��ω����Ă���̂ł͂Ȃ����Ƃ��l������B
�@����́u���[�^�̃d���v�̃O���t����́A������]���ł͔���`�ɂȂ��Ă���̂��킩��B�@����܂ł́A�Y��Ȑ��`�������������̂ŁA���_�ǂ���̋t�N�d�͂��������Ă������̂́A������]�ł͉��̔���`�ɂȂ�̂��낤���H�@���������āA�u���V���̓d���~�����e�����Ă���̂ł͂Ȃ����낤���H�@�����ɂȂ�Ƃ���d���~���ʂ������Ă���ƍl������_�������̂ł��邪�E�E�E�E�E�E�E�E�B
�@�܂��A���[�^�������̓d���E�d�������ł̔���`��Ԃ́A�u���[�^�������g���N�v�O���t�̌`�ԂƗގ����Ă���̂ŁA�����͎��̖��C�g���N�̃o���c�L����v���ł���ƍl���邱�Ƃ��o���Ȃ����낤���H
�@����ɁA���蒆�ɍ쓮���̌��������[�^������A���̉����r���ŕω����Ă�����̂Ō���ꂽ�B�@����͖��炩�Ɏ��̋��U���ۂł���A���̃A���o�����X���A�_�C�i�~�b�N�o�����X���܂߂��傫���̂ł͂Ȃ����Ǝv����B�@���̂悤�ȃ��[�^�́A��Ŏ�������Ԃʼn�]������ƁA�u���u���Ǝ�Ɋ�����̂ł����ɕ�����̂ł���B
�@�ȂǂȂǁE�E�E�E�E�E���낢��Ȍ��ۂɂ��āA���ꂱ��z����߂��炷���Ƃ��o���邪�A��͂�f�[�^��N�������K�v�ł���A�����̌��ۂ𑍍��I�ɔ��f���Ȃ��ƊԈ�������f�����邱�ƂɂȂ�B�@
���@�܂Ƃ�
�@�͂��߂́A�قǂقǂ̃}�b�`���O��ŗǂ��Ƃ��ׂ��Ǝv���Ă������A���[�^�����̑���f�[�^�̌���ƌv�Z�V�[�g�̉��P�ɂ���āA��L�̃O���t�̗�Ŏ����悤�ɁA�ӊO�ƃ}�b�`����萔�𐄒肷�邱�Ƃ��o����悤�ɂȂ����B�@�܂��͍���̎��g�݂͐����ł���ƕ]�����悤�B
�@����́A�����̃��[�^�̃f�[�^���W�߂āA���f�����̓����������o������ƍl���Ă���B
************�@�@���[�^�����̃��f�����@���ǔ��@�i2016/10/26�j ���ĕҏW�@********�@�@