
HOME >> 鉄道模型工学 > 鉄道模型工学概論 定置実験装置の測定結果と考察
鉄道模型工学概論
§3 動力特性の測定結果と考察
この定置実験装置を使用して、鉄道模型車両の動力特性を測定した結果を述べる。
§3.1 測定データ
動力特性の測定データについて、動力特性の基本式である式(20)の特性をグラフ化した図9 から図12 を対比させて説明し、基本式の検証を実施する。 なお、測定した車両の詳細については、「マイコレクション」のページを参照してください。
1)速度・電圧特性について
この特性は、平坦路を動力車のみで走行している場合の車速と電圧の関係を示したものである。 理論的には、図11
に示した状態となるはずである。
まず、その測定データの例を示そう。
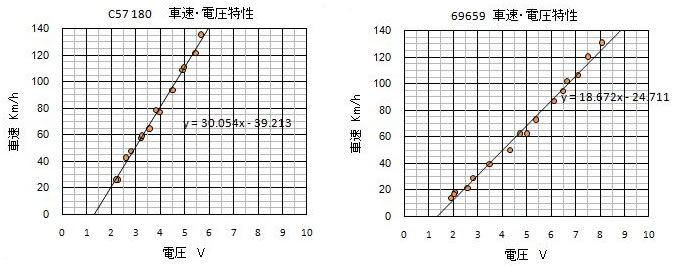
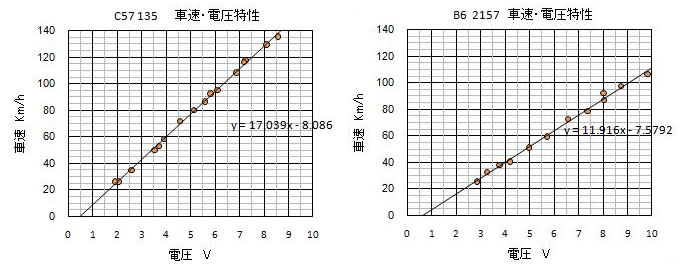
図11 のごとく、データは直線上にきれいに並んでいる。 充分に直線性は証明されていると判断出来る。 また、次のデータを見ても、車両の前進と後退時の特性を見ても、同じ傾向である。
この直線の勾配は、πD/iKe であるから、動輪直径、ギヤ比、モータ特性で表わされるので、動力車の設計特性を知ることが出来るとともに、鉄道模型の設計者の意図がそのまま表れている。 また、グラフより、スケール速度に換算している時速 80Km/h となる電圧を読み取ることもできる。
そして、車速Vo がゼロとなる最低電圧Eo は、Excel が計算した近似式のデータより計算出来る。 例えば、上記の C57 180 号の例で示せば、
Eo = 39.213/30.05 = 1.30 Volt
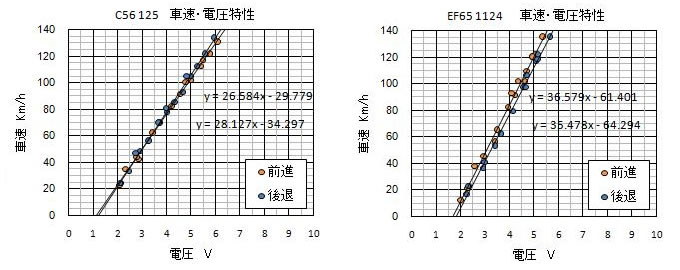
と計算出来る。 この最低電圧Eo の値は、各部の摩擦抵抗が影響しているので、模型の個体ごとにバラツクものと考えられる。 次に、比較的遅い車両のTOMIXCの C57 や、KAWAIの B6 の場合示す。
また、鉄コレやBトレ用の動力も見て見よう。
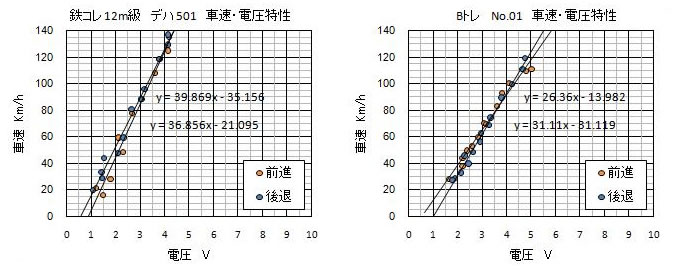
これらの車両は、比較的低電圧でスピードが出ている。 12V仕様の一般的なコントローラを使うと「かっとび走行」となってしまう。 鉄コレの場合は、乾電池仕様の鉄コレ専用のコントローラを意識しているのではないかと推定している。
2)電流・電圧特性
次に、同時に測定された電流と電圧の関係を見て見よう。 理論的には、図12に示した状態となるはずである。 その測定データの例を示そう。
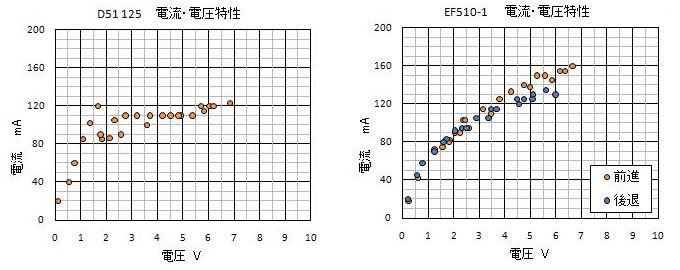
いろいろなパターンの特性を示したが、電流値は負荷に大きく影響される。 この場合は単機走行状態であるため、その摩擦抵抗は、自分自身の内部抵抗である。 そして、前照灯などの照明機器の消費電流も加算されている。 このため個体差やバラつきも大きくなると思われる。 さらに、発熱状態でも変化するであろう。
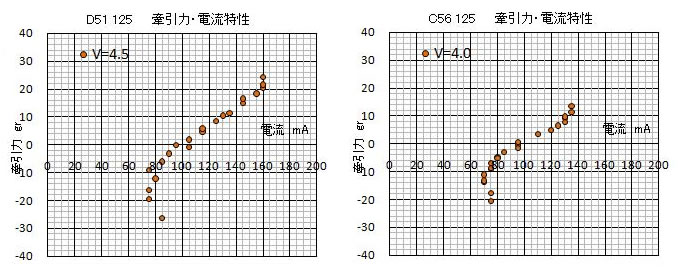
データを見ていると、立ち上り部分はオームの法則に従って、電流と電圧はまさに比例関係にあり、その勾配から、おおよそであるが計算される。 例えば、最初のグラフの D51-125 の例では、
Ra = 1.5volt/0.12A = 12.5Ω
と計算出来る。 この車両には前照灯が装着されていないので、モータだけの抵抗値と判断される。 そして、動き出した後は、110mA近辺を横ばいに進んでいるので走行抵抗はほぼ一定となっているようである。 しかし、EF510-1のように、電圧に応じて電流もどんどん上昇している例を見られる。
そして、走行開始点で発生している電流のジャンピング現象も、データには明確に表れている。
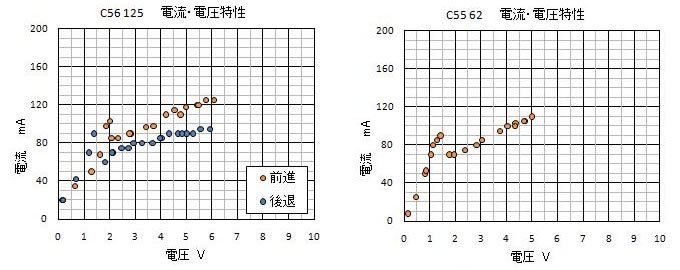
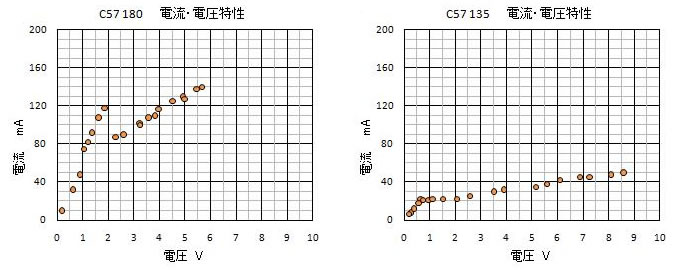
また、次のグラフのように、KATOとTOMIXのC57を比べて見ると、どこが違うのだろうと考え込んでしまう程、パターンが異なっているものもある。
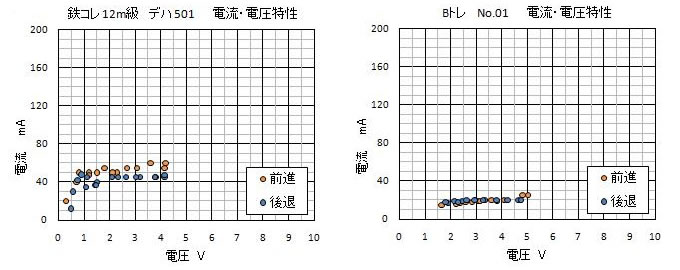
鉄コレやBトレについては、さすが小型軽量であるため、電流値も小さい。
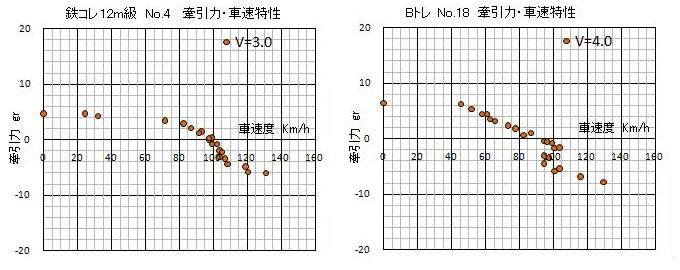
3)牽引力・車速特性
この特性は、動力車の特性を語る上で、一番興味があり、かつ重要な特性である。 他の車両を牽引している場合や、自分自身あるいは連結車両の重さによる坂道登坂・降坂時の牽引力と制動力などの、負荷状態での動力車の特性を知ることが出来る。 また、重連させた時のお互いの車両状態を知るためにもポイントとなる特性である。 そして、自分が検討した動力特性の基本式を確認する重要な特性でもある。
この測定データに対しては、図9の特性図が対応する。 それでは実際のデータを見て見よう。
まず、KATOの96型SLを見て見よう。 デフありなしや生産時期が異なる(?)が、データのバラつきを考慮すれば、同一のモデルと判断される。 29611は2009年購入の再生産品新品で、安定した性能を示している。
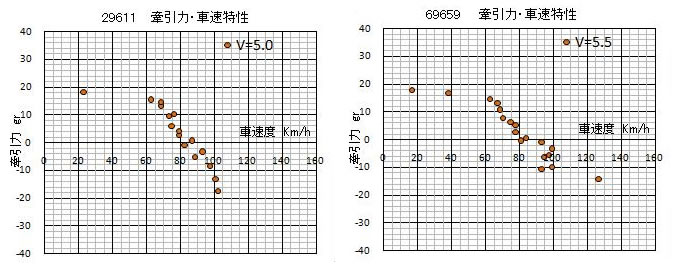
他のSLの代表的な車両を下に示す。
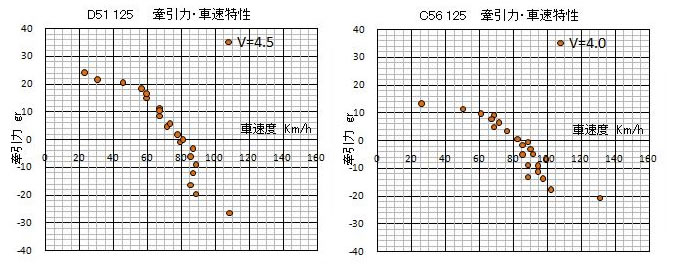
粘着限界に入った〔C〕状態のデータもなんとか収集出来ている。 もう少し多くのデータを取りたいと思ったが、滑り状態に入っているため、ゴム輪の摩耗を心配して手短に測定している。 また、制動側に於いては、〔B〕の状態について測定データ上でも、その傾向は意外と明確に出ている。 そして、データが安定する車両やバラツク車両など、不安定な状態にあることも確認できた。 また、その状態の変換点ロも明確に表れている。
通常の走行状態である〔A〕状態は、制動側を含めてもほぼ直線状であり、バラツキも意外と少なかった。 制動側の粘着限界の〔D〕状態は、円盤の回転速度も速く、大切な測定試料(鉄道模型のこと)を気遣って、そこそこに測定を終えている。
これらのデータを見ていると、図9の特性図に示した特性と同じ傾向を示しており、自分の検討してきた屁理屈が、間違いないことを証明されているようで、嬉しかった。 さらに、それぞれの車両の特徴を読み解くことができるのも楽しいですね。
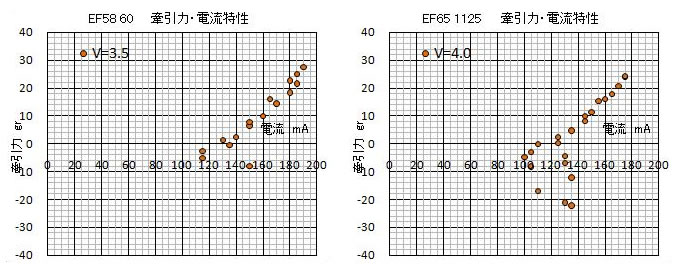
次のデータはKATOの電気機関車の例でる。 EF58 においては、〔A〕状態での勾配が意外と寝ており、坂道にさしかかるとかなりスピードダウンするものと思われる。 電気機関車は「力強いもの」とのイメージとは逆のようである。 そして、制動側の〔B〕の状態では、車両が不安定となりデータが読み取れなかった。 レイアウトでの実際の走行では、スピードダウンは確認できたが、下り坂での異常運動は確認出来なかった。 涼しい顔をして走っていた。
EF65についても、勾配がねており、〔B〕状態もギクシャクしていた。 しかし、レイアウト上での走行は何ら異常が無かった。
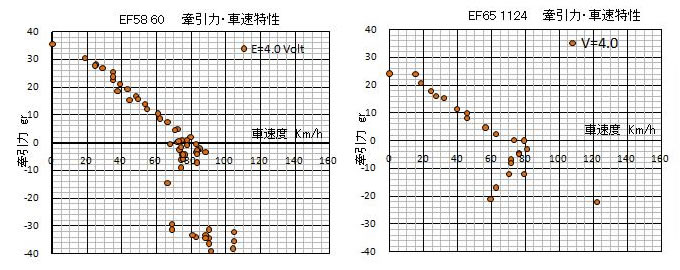
制動領域での測定方法での課題
上記の現象について、原因はまだ良く分かっていない。 不安定な牽引力負荷か、あるいは測定装置とのマッチングが取れていないのかも知れないし、 あるいは、この測定方法では測定出来ない領域であるかも知れない。 また、車両の特性としてヒステリシスを有していることも想定されるし、あるいは、模型車両として右上がりの特性を持っている可能性もある。
この制動領域での現象を測定するには、線路側を強制的に回転させる測定方法では無く、車両の速度は自身の状態で保持できる傾斜法による負荷設定方法が必要かもしれない。 この問題は、今後の課題とする。
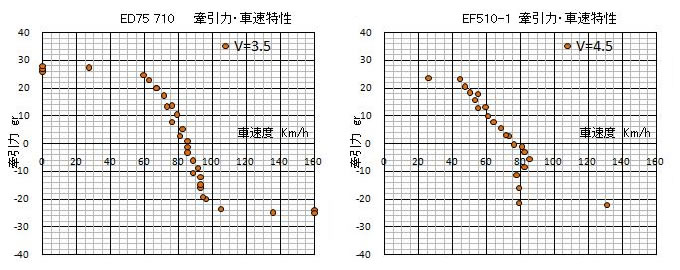
一方で、TOMIXのED75では、逆に勾配が立っており、さらに牽引力も30g近くもあるため、坂道でもなんでも、スピードを落とさず、どんどん登って行く感じと思われる。 これこそ力強い電気機関車と言える。 データのバラつきも小さく安定した走りを見せている。
他の考え方として、重連させる場合には勾配が寝ている方が適用しやすいので、車両を選別する場合にも参考となる。 即ち、ここで示されたED75よりもEF65の方が重連用機関車には向いていると言える。
なお、この特性でしめされる勾配は、モータ特性とギヤ比で決まり、ガタや摩擦等の製作誤差には関係しない。このため設計値そのものに近い(測定誤差は影響する)ので、メーカーの設計意図が見えてくるようである。
参考に、鉄コレとBトレの特性も調べてみました。 さすがに小型車であるので、牽引力は小さい。 このため、縦方向のスケールは拡大しています。 しかし、Bトレが意外に力がある! と思われるかと思いますが、実は水草用の重りを使ってしっかりと加重しております。 車両重量は 34.6g もあり、それも動輪側に片寄せています。 通常の車両重量は、15〜20g 程度ですから、かなりの重量アップとなっています。
さらに嬉しいことに、勾配が寝ているため、重連がしやすい特徴もあります。 我がミニレイアウト、RT鉄道では、多くの車両を連結して走らせています。 700系や500系では、4M12Tの16両編成などで走らせています。 4両のモータ車は同じ仕様とは言っても製品がばらついているはずですが、このデータを見るとその違いをなんなく吸収しているものと推察します。 実際に重連させても何ら違和感がありません。 トラブルを起こすのは、むしろ集電性の方で、動力特性は気にする必要はないと思います。
模型の大小や、SL、EL、電車など色々な形式の動力車に於いても、構造的には同じであるため、その特性も同じ傾向にあると言えます。 そして何よりも、図9に示した通りの特性になっていると言えるでしょう。
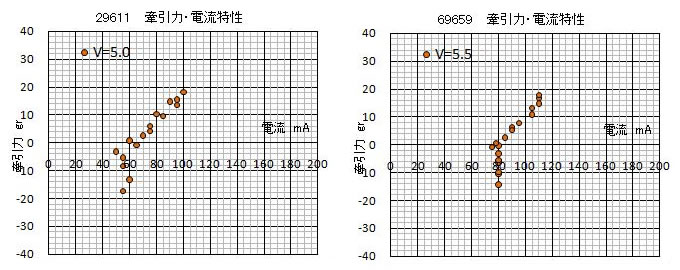
4)牽引力・電流特性
次に、牽引力・速度特性と同時に測定した牽引力・電流特性を見て見ましょう。特性図は図10に該当します。 データは、3)の牽引力・車速特性と同じ順番に並べてあります。
KATOの96型SLの2両です。殆ど同じ特性と言えよう。
他のSLにおいても、〔A〕状態と〔B〕状態がきれいに出ています。
どうも、EF系の機関車は、〔B〕状態での電流特性に、趣きが異なっている様にも思える。 n 数が少ないのでなんとも言えないが、この点も今後の実験課題です。
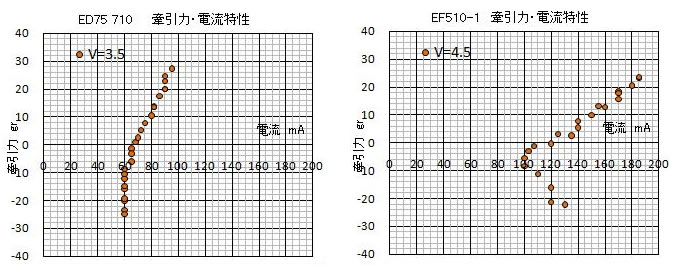
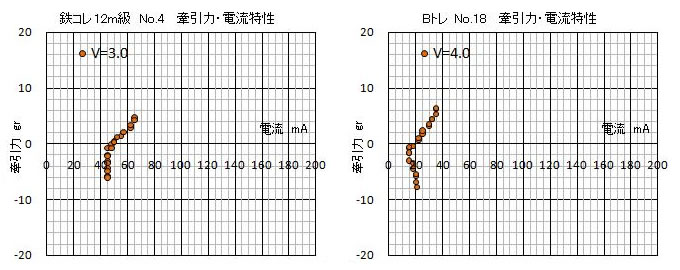
どれを見ても、〔A〕状態と〔B〕状態がくっきりと示されています。 また、〔B〕状態が安定しているものと、不安定なものがあることが分かります。 〔A〕状態では、牽引力と電流が直線関係にあり、その勾配は設計値そのものです。 この測定では、電圧は一定値であるので、前照灯などの照明機器の電力は一定となります。 従って特性の変化具合はモータの特性ということないなります。 ED75とEF510との違いは何があるのか興味が湧いてきます。
測定データは、§1.5 車両特性で述べた特性に合致した傾向を明確に示しています。 このことは、式(20)に示した内容は、車両特性をほぼ正しく表現しているを示しています。
なお、重ねて述べるが、 この装置はあくまでホビーでの範疇であり、簡易でやや不安定な装置で測定しているため、 このサイトで記載されている内容について、
測定されたデータの値について、
その精度や信頼性はなんら保障されているものではない。
小さな鉄道模型における性能については、個々の製品毎のバラつきは大きいし、使い込まれた経緯やメンテナンスの状態は千差万別である。 チョットした組付け具合や調整によって、その走行性能や集電性能が大きく変わってくることは、鉄道模型の愛好家であれば、おおいに経験されていることと思われる。 また、測定方法についても、まだまだ問題を含んでおり、果たしてその測定データは信用できるのかといった疑問も含んだままである。
このため、データとしての疑問な点があった場合には、 測定した模型車両側の問題かもしれないし、測定装置や測定方法の問題かも知れない。 今後のデータの積み重ねと、第3者による同様な実験実績によって、確立されて行くものと考えている。