
HOME >> 鉄道模型工学 > 鉄道模型工学概論 >
重連特性 目次 特性式と特性図 重連時の課題 実験データでの検証
鉄道模型工学概論 重連特性
§3 実験データでの検証
§3.1 実験対象の車両
重連特性を理解するためには、適切な車両で実測するのが一番である。 このために、どのような車両で測定しようかと思案中に、偶然にも適切な車両を見つけてしまったのである。 その車両はマイクロのEH10-9号機である。

その入手のいきさつや調査結果については、 既に「2モータ式EH10 の不調原因をさぐる」 として報告済みであるが、ここでは、重連特性の実験データとしての観点から、再編集して記載することにする。
この車両は、同じ構成の2両の車両を連結させているが、モータはそれぞれの車両に搭載されている。 そして、その特性もピッタリと同じである。 しかし、幸い(?)なことに、入手時には、一方の車両のモータが不調であったため、特性が異なる2台の動力車の重連状態となっていた。 分解修理によって、その不調を改善すると、特性がピッタリの重連状態を再現させる事が出来てしまった。 この修理の前後の特性を比較することによって、重連特性の一面を垣間見ることが出来たので、その知見内容をここに報告することにした。
なお、 不調の原因や修理内容については、上記のページを参照してください。
測定データは、貨車などを牽引していない機関車単体で平坦路を走行している無負荷状態での、速度と電圧、および電流と電圧を測定し、車速・電圧特性および電流・電圧特性を調査した。 その後、牽引力計を接続し、牽引力と速度、および牽引力と電流を測定し、牽引力・車速特性および牽引力・電流特性も調査した。 この2つの状態の4つの特性を順を追って説明する。
そして、各特性の説明で示すグラフでは、左側のグラフが不調状態でのデータであり、速度の異なる車両が重連された一般的な重連状態を再現している時のデータと見る事が出来る。 また、右側のグラフは、速度特性がピッタリと合致した理想的な重連状態を再現しているデータを表わしている。 この両者を比較して見ていく事によって、重連時の特性が明らかになると思われる。
§3.2 車速・電圧特性について
最初に、貨車などを牽引していない機関車単体で平坦路を走行している無負荷状態での、速度と電圧を測定した車速・電圧特性を示す。
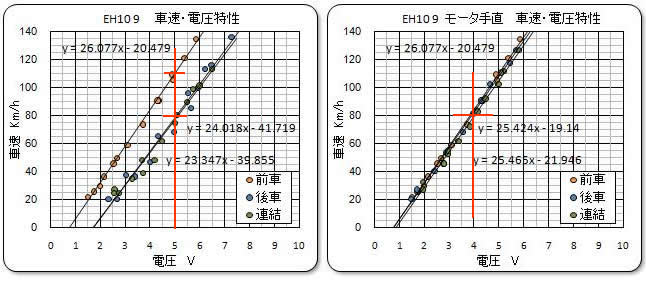
左のグラフの状態において、電圧 E = 5.0Volt では前車がスケール速度 110Km/h を出しているのに対し、後車は 80Km/h の速度しか出ていない。 その差は 30Km/h もあり、それぞれを離して走行させると見る見るうちに離される行く事が観察される。 その速度差は歴然としている。 この車両を連結させた状態で走らせると、後車がブレーキ役となるため、合体した両車のスピードは、後車単機走行とほぼ同じ速度まで落ち込んでしまっている。
後車の不具合を手直しして、前車と同じ特性まで改善した場合は右のグラフで示される。 両車はほとんど同じ速度特性となり、連結しても単機走行と同じ状態を保持している。 そして、スケール速度 80Km/h を出すには電圧 E = 4.0Volt で良い事も示している。
§3.3 電流・電圧特性について
次に、同じ状態での、電流と電圧を示す電流・電圧特性を記載する。
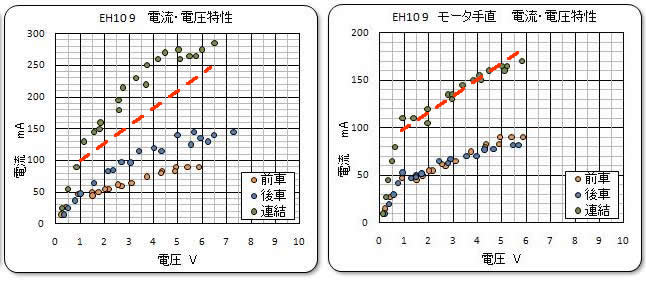
左のグラフにおいて、後車は前車よりも電流が明らかに高い。走行後も車体が温かくモータが発熱しているのが感じられる。 そして、連結した場合、前車と後車の消費電流を合計した値を赤点線で示すが、実際のデータはそれよりもずっと高い事を示している。 これは、重連時には何か異常な現象が発生している事を暗示しているとも云える。
モータ手直し後の理想的な重連状態では、消費電流を合計した赤点線とほとんど同じ値を示している。 なお、前車が後車よりも電流値がやや多いのは、前照灯を点灯しているためであり、モータでの消費電流はほとんど同一であると判断している。
§3.4 牽引力・車速特性について
次に、負荷状態での走行を考察する。 まず、牽引力と速度を示す牽引力・車速特性を見てみよう。
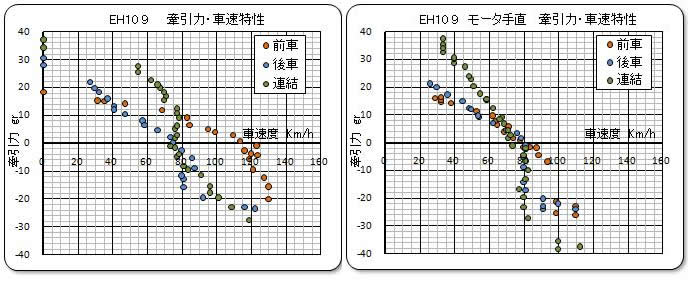
供給電圧は、連結状態でスケール速度が 80Km/h となるように、左のグラフでは、 E = 5.0Volt にて、右のグラフでは、 E = 4.0Volt にて測定している。 データがややばらついていて見にくいが、両者の違いははっきりと読み取れる。
まず、§1.3の重連時の特性で示した特性図と比較してみてみよう。 A機関車を前車、B機関車を後車とすれば、不具合時の連結状態では、前車と後車が引張やっこをしており、後車がブレーキ役を担っているのが明白である。 そしてこの制動領域での垂直な速度特性に引きずられて、連結時でも牽引側でも垂直に近い特性となっている。
両車が通常状態で走行しているのは、50 〜 80Km/h で負荷が 10 〜 25 グラム掛っている場合のみであることも分かる。 それ以外の状態では、両車あるいは一方の車両が不安定な走行領域に陥っている。
右のグラフに示す理想的な重連状態では、連結時には、それぞれの車両の特性を合算した状態をそのまま示していると見る事が出来る。 そして、通常状態で走行しているのは、30 〜 80Km/h で負荷が -5 〜 35 グラム掛っている場合と、大幅に拡大しているのが読み取れる。 後車のモータを少し手直ししただけで、これだけの効果がある事が判る。
§3.5 牽引力・電流特性について
次に、負荷状態での牽引力と電流を示す牽引力・電流特性を見てみよう。
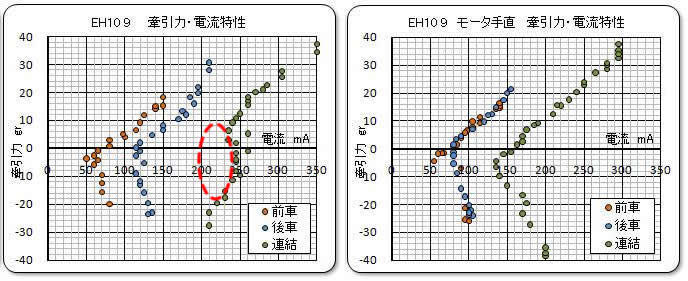
不具合時の連結状態を示す左のグラフを見ると、赤点線で示す領域で、電流値が膨らんでいるのが判る。 外部からの負荷が小さいのに電流値が高いのは、連結されている車両同士が引張やっこをしているためであり、余分な電力を消費している。 右の理想状態では、この領域での電流値が大幅に低下しており、連結による弊害が発生していないことを示している。
§3.6 まとめ
今回は、特異な状態での性能を測定する事が出来た。 これによって、今まで検討してきた重連時の状態について、より深く理解出来たと共に、その考え方が間違っていないことも証明出来たと思う。