
モータ特性のモデル化
■ はじめに
我が実験室の「鉄道模型実験室/モータの速度特性の測定」(2012.4.21作成)で報告したように、今年の春頃より、モータ単品の特性測定に挑戦しています。 そして、最近では動力車の動力機構の伝達効率を推定することもトライしております。 この中で、モータの出力トルクと回転数を電圧値と電流値から推定する必要がでてきており、どうしてもモータ特性を数式で表現する「モデル化」が必須となってしまいました。
数式自体は参考文献などから容易に組立てることが出来るのですが、
モデル化で一番の問題は、数式に含まれる定数の「数値」をどうやって設定するのか? と言うことです。
モータで言えば、トルク定数とか逆起電力定数の値をどうやって測定するのか、あるいは設計図から計算するのか、・・・・・・・・・・・・。
ホビーとして実施している小生の実験室では、モータの外部から測定出来る特性を使用し、モータの機能を発揮している各定数を推定する方法を取ることにしました。 モータの研究をする訳では無いので、原理的な厳密性を追求するものではありません。 ただ、モータに供給された電圧と電流値からモータの出力トルクと回転数を計算出来れば良いと言う立場です。
また、鉄道模型のモータは、メーカ毎に、あるいはモデル毎に異なっています。 さらに、個体毎にもバラツキがありますので、これらの定数は製品毎に求める必要があります。 そこで、測定データをもとに、これらの定数を容易に推定する方法を探索することにしました。
■ モータの関係式
まず始めに、モータの関係式を整理しておこう。 鉄道模型工学概論に記載した関係式と、その後、動力車の調査で追加したモータに関する式を整理して再掲載する。 ここでは、モータなどの慣性を考えていない静特性を考えている。 また、モータのトルクについては、モータの内部回転抵抗を考慮するため、電磁気的に回転子が発生したトルクを「モータトルク」とし、モータの出力軸から取り出せれるトルクを「出力トルク」と呼ぶことにする。
![]()
 .
.
基本特性として、モータトルクを Tm 、コイル電流を I 、トルク定数を Kt とすると、
![]()
で示される。 即ち、モータのトルクはコイル電流に比例し、直接的には外部電圧には依存しないのである。
次に、逆起電力を e 、モータの回転数を Nm 、逆起電力定数を Ke とすると、
![]()
となる。 また、外部電圧を E 、巻線抵抗を Ra 、ブラシ接触部の電圧降下を Eb とすると、
![]()
ちなみに、モータの回転数を Nm を、外部電圧 E と、コイル電流 I を用いて表わすと、①②式より、
![]()
となる。 また、モータの内部回転抵抗、即ちモータ軸損失を速度比例項と一定項で表わすとすると
![]()
で表現でき、その値は、モータトルクと出力トルクの差として現れる。
これらの関係を理解するために、ブロック線図で表現すると、右の図の様になる。
モータの関係式は、上記の4個の基本式で表わせるが、逆起電力 e の作用で、ややこしくしている。
このブロック図は、エネルギー伝達ブロックと理解すれば、より分かりやすい。 モータは、電源より電圧と電流のエネルギーを受けて、負荷に対して回転数とトルクを作用させるエネルギー変換装置である事が分かる。 逆方向に作用すれば発電機となるのことは、ご存じの通りである。
そして、エネルギーは、負荷に応じて供給されることを覚えておこう。 電源は一定電圧を供給するが、電流はモータの負荷に応じて沢山流れたり、わずかしか流れないといった状況を呈するのである。 自分はこのことを 「のれんの腕押し」 と理解している。 腕っ節の強いお相撲さんでも、のれんを押していく時には、その力を必要としないのである。
また、このエネルギー伝達ブロックは、モータに限らず、機械装置や油圧機器など、いろいろな装置やシステムに適応する事ができるが、特徴として、4端子ブロックとなることである。 エネルギーとして表現される、電圧×電流、回転数×トルク、速度×力、圧力×流量、・・・・・・・・・・・など、入力が2端子、出力も2端子の4端子ブロックである。
さて、話はそれてしまったので、本筋に戻す事にする。
モータの特性を示す式は、上記の4個の基本式を変形して表示すればよいのであるが、どの変数をどの変数を用いて表わすかを考えなければならない。 自分もよく混乱するので、例を示しておこう。
上のブロック図から見ても分かるように、モータの6個の定数が分かっていれば、回転数 Nm は、電圧値と電流値から計算できるのである。 さらに、モータを無負荷の状態で運転している場合には、電流値が分からなくても、出力トルクがゼロであることより、電圧値だけからでも計算出来るのである。 このモータが無負荷の状態で運転している場合は、モータ軸には何も連結されていないので、出力トルクは常にゼロである。 いま、モータにある電圧を掛けるとモータは回り出し、ある回転数に落ち着く。 これは、電動子が発生しているトルクとモータ軸の回転抵抗がバランスしている状態である。 このトルクを発生させるためにいくらかの電流が流れている。 この状態では、回転数 Nm を電圧値と電流値から計算できるが、電流値が分からなくても、出力トルクがゼロであることより、電圧値だけからでも計算出来るのである。 でも、出力トルクがゼロである必要はない。 出力トルク Tm’ が測定出来れば、この Tm’ と電圧値 E から回転数 Nm を計算できるのである。
即ち、ある変数を求める場合、他の三つの変数のうち、二つの変数さえ分かれば計算出来るのである。 このことを念頭において、外部から測定出来る四つの変数を使ってモータの特性を決める6個の定数の値を推定方法を探索することにする。
■ 定数の推定の方法
モータ単品での特性を測定したデータをもとに、モータの特性を決める6個の定数を容易に推定する方法を探索することにしました。
この原稿を書いていくなかで、今までの考察をまとめてEXCELのグラフを見直している時に、ハッ と気付いたことがある。 それは、EF66-51の調査の時にモータ軸の損失トルクを計算してグラフ化していたが、このグラフを見ている時に、λm と Rm がはっきりと表示されていることに気付いたのである。 このグラフは、トルク定数 Kt を仮の値に設定し、電流 I と出力トルク Tm’の実測値を使って所定の式でトルクを計算し、横軸には回転数Nm の実測値を用いてグラフ化したものである。 するとこのグラフの勾配がλmを示し、Y切片がRm を示していたのである。 λm と Rm をはっきりと分離し、EXCEL が自動的に最適値まで計算してくれているのである。 これによって、 定数 Kt 、Rm 、λm の最適値をそれぞれ推定出来のである。
同じ考えを定数 Ke 、Ra 、Eb にも当てはめて、デルタ電圧δと勝手に名づけたが要素を計算することによって、これらの定数も同様に簡単に最適地が推定出来ることを見つけだした。
このため、ほぼ出来あがっていたこの報告書の内容を再編集し直し、新たな構成で作り直したのである。
 .
.
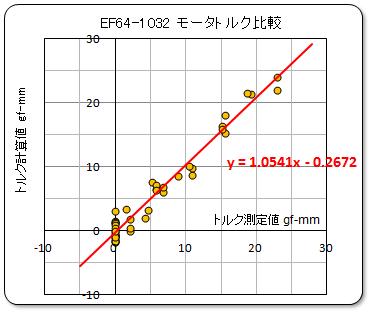
1) 出力トルクTm’を計算と実測値とで比較
- 回転数 Nm 、電流 I 、出力トルクTm’の関係より、Kt 、Rm 、λm を確かめる。
- 測定された電流 I と回転数Nm より、式①と④を使用して出力トルクTm’を計算し、実測値との比較により、 もっともよく合致する Kt 、Rm 、λm を求める。
- 出力トルクTm’の計算式

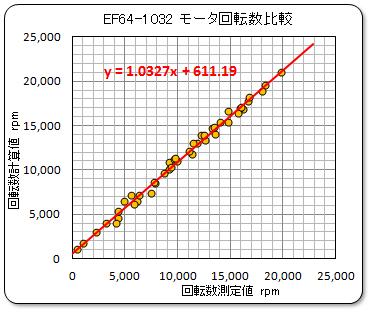
- 3個の定数 Kt 、Rm 、λm を仮の適当な値に設定して、出力トルクTm’の計算値を求め、右の様なグラフを描き、実測値と計算値が1:1になるように、 Kt 、Rm 、λm の値を修正していく。 計算値は赤色で示している。
- 即ち、赤色で示した近似直線が、 y = 1.0000x ±0.00 に近ずくほど良いと判断する。
- 測定データは、無負荷特性とトルク特性の全データを使用する。
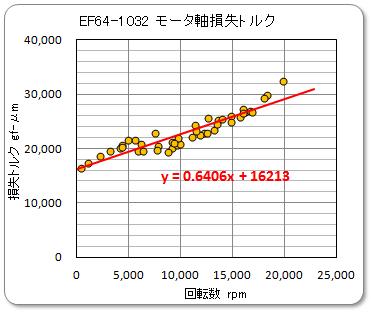
2) モータ軸損失トルクを利用する
 .
.
- 今までの考察をまとめてEXCELのグラフを見直している時に、ハッ と気付いた。 それは、EF66-51の調査の時にモータ軸の損失トルクを計算してグラフ化していたが、このグラフを見ている時に、λm と Rm が表示されていることに気付いたのである。
- モータ軸損失トルクは、前述の④式で表わされるが、①式を使って Tm を消去すると、

となる。 ここで、Kt を仮の値に設定し、電流 I と出力トルク Tm’の全ての実測値を使って、上の式の右辺の計算により、モータ軸損失トルクを求め、グラフ化したのが、左のグラフである。 横軸には回転数Nm の実測値を用いている。 - そのプロット点を直線近似させ、その計算式も表示させている。 この近似式の勾配とY切片の値に注目しよう。 上の式の左辺(中央)と見比べて見ると、勾配がλm を、Y切片がRm の値をダイレクトに示しているではないか・・・・・・・・・・・!
- ただし、左のグラフにはひそかな細工がしてあります。 EXCELの近似式の係数は、小数点以下4桁しか計算してくれない。 当初の状態では y = 0.0007x + 17.368 としか表示してくれなかった。 これは回転数の値が1万回レベルで、桁数が大きかった為です。 そこで、縦軸の数値の桁数を上げることにしました。 データを 1000 倍して表示することにすると、見事に有効数字を上げる事が出来、推定値の精度を上げることが出来たのです。 従って、縦軸の表示単位は、gf-mm から gf-μm と見慣れない単位となってしまいました。
- このグラフを使用すると、Kt を仮の値に設定すれば、それに対応した最適なλm とRm をEXCEL が自動的に計算してくれます。 そこで、この ( Kt 、Rm 、λm ) のセットを使い、前述の(1)のグラフで、出力トルクTm’の計算値と実測値とを比較しながら、Kt の値を少しずつ変化させます。 この時に、評価尺度として近似直線の式を見て行けば、最適な組み合わせを求めことが出来ます。 即ち上記の二つの式と二つのグラフを見ながら、評価尺度の y = 1.0000x ±0.00 に容易に近ずくことが出来るのである。
 .
.
3) 回転数Nm を計算と実測値とで比較
- 回転数 Nm 、電圧 E 、電流 I の関係より、Ke 、Ra 、Eb を確かめる。
- 測定された電圧 E と電流 I より、式②と③を使用して回転数Nm を計算し、実測値との比較により、 もっともよく合致するKe 、Ra 、Eb を求める。
- 回転数Nm の計算式

- 3個の定数 Ke 、Ra 、Eb を仮の適当な値に設定して、回転数Nm の計算値を求め、右の様なグラフを描き、実測値と計算値が1:1になるように、Ke 、Ra 、Eb の値を修正していく。 計算値は赤色で示している。
- 即ち、赤色で示した近似直線が、 y = 1.0000x ±0.00 に近ずくほど良いと判断する。
- 測定データは、無負荷特性とトルク特性の全データを使用する。
4) モータの電圧関係を利用する
 .
.
- 上記の(2)の考えを、(Ke 、Ra 、Eb )のセットでも応用出来ないか検討した。 このセットは電圧関係の式なので、②と③の式に注目した。
- ②と③の式より、逆起電力 e を消去すると、

となる。 この式の意味する物理的内容は良く分からないので、デルタ電圧δと勝手に名づけたが、前記の(2)と全く同じ形態となることに、自分でもびっくりしている。 - ここで、Ra を仮の値に設定し、電流 I と電圧 E の全ての実測値を使って、上の式の左辺の計算により、デルタ電圧δを求め、グラフ化したのが、左のグラフである。 横軸には回転数Nm の実測値を用いている。
- 縦軸の細工も前記の(2)と同じである。 直線近似の勾配とY切片より、Ke と Eb をダイレクトに求めることができるのである。
- この(Ke 、Ra 、Eb )のセットを使用し、前述の(3)のグラフで、回転数Nm の計算値と実測値とを比較しながら、(Ke 、Ra 、Eb )の最適値を推定していくのは(2)と同じである。
*******************************************
上記の(1)から(4)の方法により、(Ke 、Ra 、Eb )と(Kt 、Rm 、λm) のセットを、それぞれ分離して最適値を推定出来る。 しかし、本当に最適値なのかどうかは、他のグラフを使用して検証しておく必要があるだろう。 その結果を踏まえて、個別の定数値の全体的な適合具合を判断することが望ましいと考えている。
5) 無負荷特性での回転数の比較
- 無負荷特性では、比較的データのバラツキが少ないので、このデータを活用する。
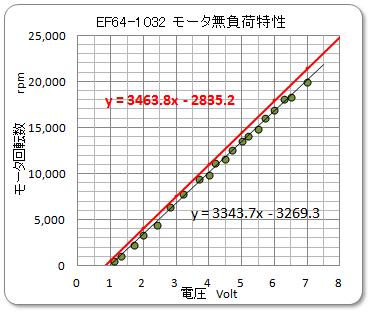
- 電圧をある値に設定し(ここでは1volt、2volt、~7voltまで)、出力トルクゼロの条件を入れて、モータの回転数 Nm を計算し、実測データのグラフの上に重ねて表示させる。 右のグラフ参照。
- 回転数 Nm の計算式は、①②③④式より、電流 I を消去し、Tm’= 0 を条件として式を整理する。

- 実験値と計算値は、それぞれ近似直線を表示させ、その計算式も表示させる。
- 式には6個の定数が 影響している。
 .
.
6) 無負荷特性での電流・電圧特性の比較
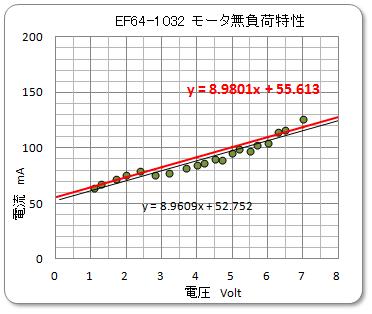
- 電圧の増加によって(回転数の増加によって)電流値が増加している様子が示されているので、このデータを活用する。
- 電圧をある値に設定し(ここでは1volt、2volt、~7voltまで)、出力トルクゼロの条件を入れて、電流 I を計算し、実測データのグラフの上に重ねて表示させる。 左のグラフ参照。
- 電流 I の計算式は、①②③④式より、回転数 Nm を消去し、Tm’= 0 を条件として式を整理する。

- 実験値と計算値は、それぞれ近似直線を表示させ、その計算式も表示させる。
- 式には6個の定数が 影響している。
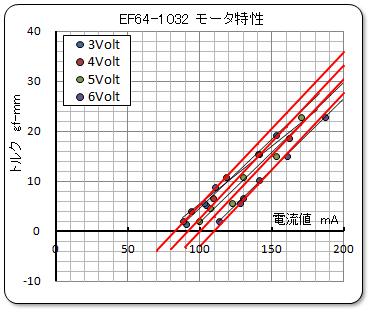
7) トルク特性での比較 1
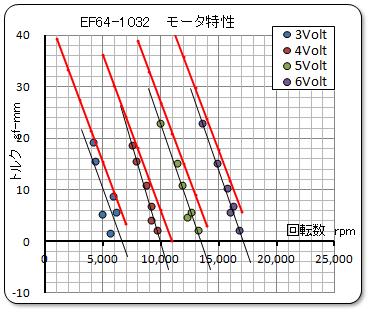
- モータ特性として一般的に知られているトルクと回転数のグラフに、計算値を重ねて比較する。
- パラメータとしての電圧を測定時の設定値(例 3volt、4volt、5volt、6voltt)に合わせ、モータの回転数 Nm を実測データ近辺の値に設定し、この電圧と回転数より出力トルク Tm’ を計算して実測データのグラフの上に重ねて表示させる。 右のグラフ参照。
- 出力トルク Tm’ の計算式は、①②③④式より、電流 I を消去して式を整理する。

- 実験値と計算値は、それぞれ近似直線を表示させ、その合致具合を探る。
- 式には6個の定数が 影響している。
 .
.
6) トルク特性での比較 2
- モータ特性としてトルクと電流値のグラフに、計算値を重ねて比較する。
- パラメータとしての電圧を測定時の設定値(例 3volt、4volt、5volt、6voltt)に合わせ、電流値を実測データ近辺の値に設定し、この電圧と電流値より出力トルク Tm’ を計算して実測データのグラフの上に重ねて表示させる。 左のグラフ参照。
- 出力トルク Tm’ の計算式は、①②③④式より、回転数 Nm を消去して式を整理する。

式の中の符号に間違いがありましたのでお詫びして訂正いたします。(2012.9.18 訂正)

- 実験値と計算値は、それぞれ近似直線を表示させ、その合致具合を探る。
- 式には6個の定数が 影響している。
■ 実際の計算方法
実際の計算方法について説明する。 計算シートは EXCEL を使用して必要な欄に計算式を埋め込み、計算された値をグラフに表示する。
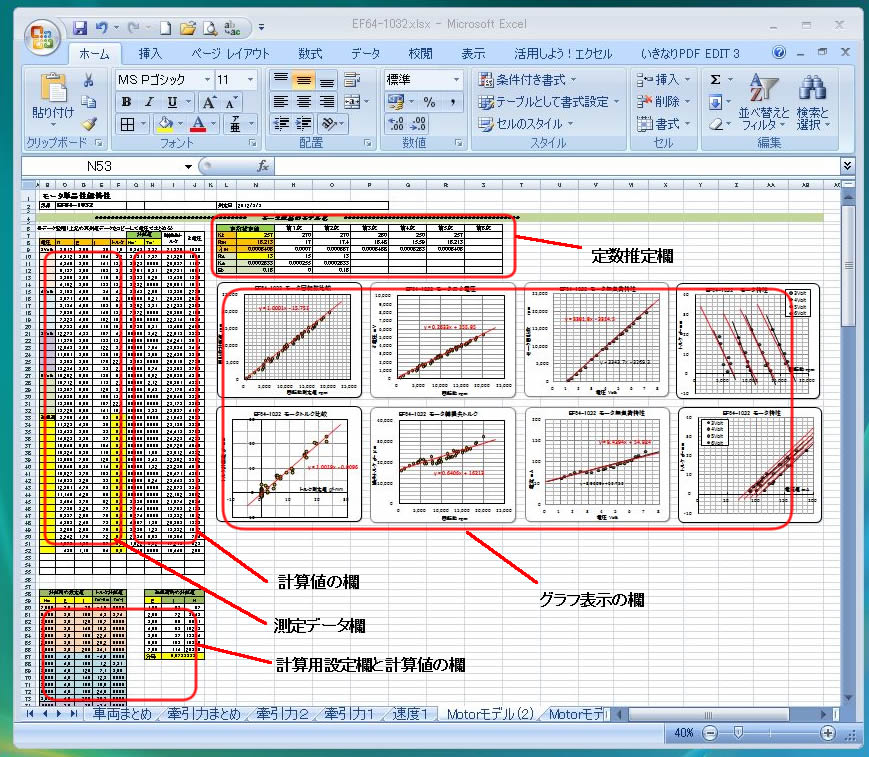
 .
.
定数の推定欄は、一か所にまとめ、各計算で必要となった場合には、参照セルのセル番号を$記号付きの絶対参照として指定する。 また、逐次修正していくので、古い設定値をメモ代わりに右の欄に順次コピーしておくことにしている。 このシートだけで、モータの6個の定数を求める事が出来るようにしている。 また、グラフは、そのままコピーしてホームページに活用出来るよう大きさを揃えている。
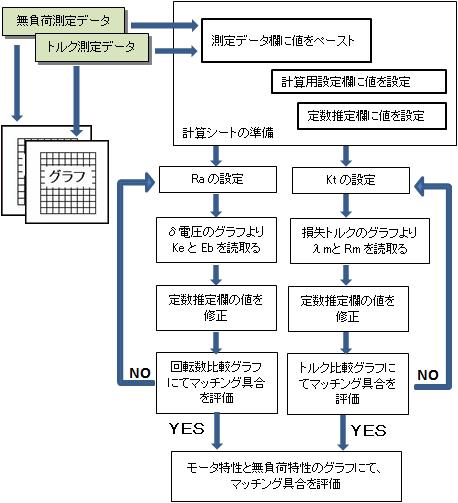
次の、計算手順を説明する。 左の簡単なフローのように、
- 測定データを整理して測定データ欄に貼り付ける。
- 測定データのグラフを見ながら、計算値を表示するための、電圧値や電流値などを決めて計算用設定欄に記入する。
- 定数推定欄に、他のモータの値を参考にしながら、計算のための初期値を記入する。
- δ電圧のグラフより、Ke と Eb を読み取り、 定数推定欄の値を修正する。
- 回転数比較グラフより、マッチング具合を評価する。
- 評価がいまいちの場合には、Ra の値を修正して、4に戻る。
- OKであれば、同じ方法で、Kt 、Rm 、λm 値を求める。
- OKであれば、モータ特性や無負荷特性のグラフにて、実測値と計算値のマッチング具合をチェックする。
- 不満であれば、あちこちの定数を修正する。 いじくり回していると、どの定数が何に効いてくるか分かってくるので、最後の微調整をする。
- もともと、モータ作動の不安定性や、やや怪しい測定方法の影響で、測定データ自身のバラツキや信頼性への疑問などを念頭において、ほどほどのマッチング具合で良しとすべきでしょう。
今回は、EF64-1032 の調査に合わせて、工夫したものである。 次回からこのシートを活用し、調査のスピードアップをはかり、多くの模型車両を調査して行こう。 その先には、模型メーカの開発苦労が見えてくるかも知れないし、不具合車両の手直しポイントが分かるかも知れない。 こんな期待を持って、この調査に熱中している青年(70を過ぎた?)がここにいるのである。