
鉄道模型実験室 モータの速度特性の測定
鉄道模型工学の一環と思いながらも、だんだん深みにはまり込んでいます。 今回は、かねてから考えていたモータ単品での性能測定に挑戦することにしました。 そのきっかけは、非接触による回転速度の計測が可能となったからです。 その測定方法の紹介をかねて、TOMIX カニ24-100形 補助動力車のモータを使用して、その速度特性を測定することにしました。
● 測定装置の概要
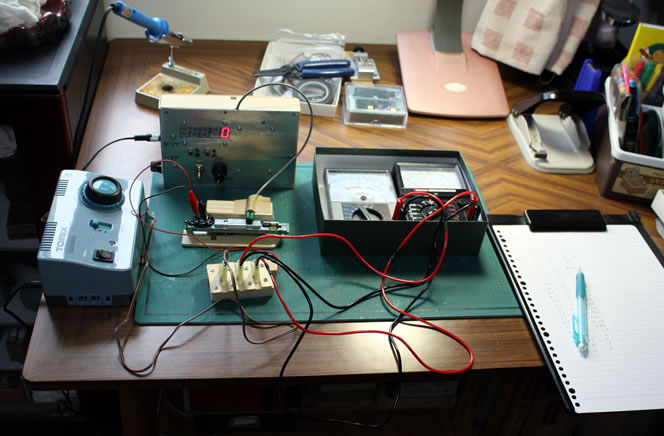
測定装置を説明いたします。 下の写真はその全体を撮影したもんで、いつもの作業台の上で作業しております。
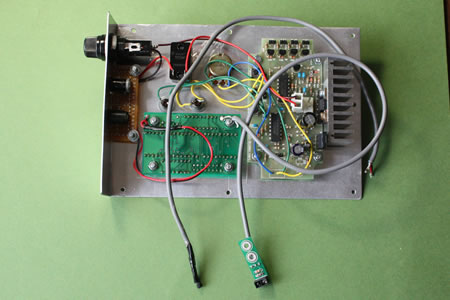
まず、センサー部分を紹介致します。 工作室売店 ( http://iizukakuromaguro.ocnk.net/ )から発売されている 「デジタル回転計センサー基板」 の中の反射式センサー3mm 砲弾型センサー ( SENSOR-REF-3mm ) のキットを使用しました。 組み上げた状態が下の写真の右側の物です。 左側は、今まで定置実験装置の駆動部に使用していた磁気式のセンサーです。

その回路部は、今まで使用していたものをそのまま使用して、センサーを取り替えただけです。 今回は、円盤駆動用のモータを使用しないのでその駆動制御回路は不要なのですが、 面倒なので取り付けたままにしております。 横着ですなぁ・・・・・。 左の写真が裏側の回路基板類で、右側の写真がケースの表側です。 表示は今までどうりの5桁で表示します。 表示単位は rpm です。

************************************************************************************
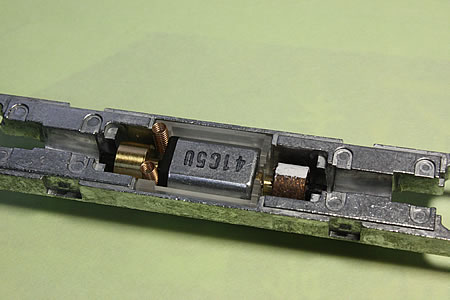
次に、供試品であるモータを車両から取り出し、反射式センサー用の反射部分を作ります。 丁度良い具合にフライホイールがありますので、その外周にクラフト・テープを巻き付け、ペイントマーカーで一部分を白く塗っておきました。 この部分が回転する反射部分となります。

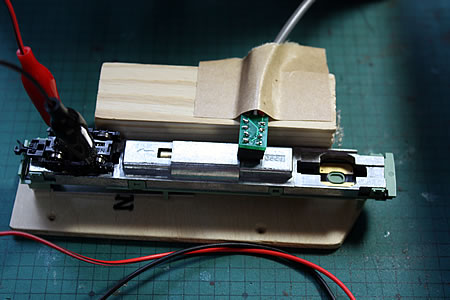
モータ単品で測定しても良いのですが、今回は車体に組み込んだ状態で測定することにしました。 ただし、台車に回転を伝えるジョイントなどは組付けません。 左の写真は、シャシーの中にモータを収めたところで、その状態を上下をひっくり返したものが右の写真です。 窓からうまい具合にモータの回転反射部分が見えます。 ここにセンサーを近付けて、モータの回転を測定することにしました。

プリント基板や床板を組付けたあと、適当な台に車体を裏向けに置き、通電のために片方の台車を組付けて、クリップで車輪部分をはさみ、電源と接続します。 センサーはモータの回転反射部分が見える窓の部分に置き、ガムテープで固定しています。 下の左の写真です。 電源はパワーユニットを使用し、その配線の途中から電流と電圧が測定出来るようにコンセント(?)を作りました。 電流と電圧はアナログテスターを使用してます。 右の写真にその状態を示します。
● モータの速度特性の測定
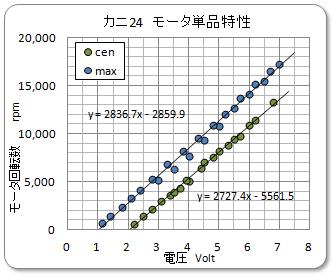
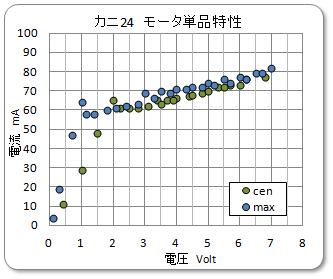
調整ボリュームは、高速側の max 状態と、そこから90度戻した状態を測定した。 モータには、何も連結されていない状態なので、非常に静かで安定した状態で測定することが出来た。 電圧を掛ける方向は、テールランプが消える方向で測定した。
モータの発熱による温度変化によって特性は変化すると思われるが、厳密な実験ではないので、適当な馴らし運転の実施と言う事で、あまり気にしないことにしている。
maxの状態( max )と90度戻した状態( cen )では、勾配がやや変化しているしているものの、殆んど平行移動であると言えよう。
● 平坦路単機走行データとの比較
動輪はギヤにてモータと連結されているため、車輪のスリップをゼロと仮定した場合には、車体の速度とモータの回転数の関係は計算にて求められる。
すなわち、車体のスケール速度を V [ Km/h ] 、モータの回転数を Nm [ rpm ] 、動輪の直径を D [ mm ] 、 減速機構のギヤ比を i とすると、 N ゲージの縮尺は 1/150 なので、
V = πD/i ・Nm ・ 60×150/1,000,000
= 0.0283 ・D/i ・Nm
となる。 単位換算のための係数について、60は分から時に、150は模型上のスケール速度に換算するもの、1,000,000はmm を Km に換算するものである。
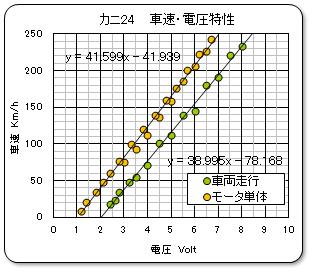
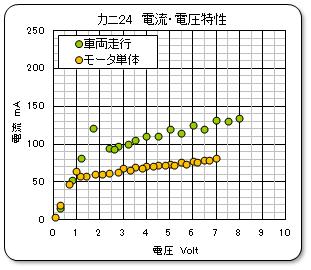
このカニ24の場合は、動輪が 5.7 mm で、ギヤ比が 11 であったので、先ほどのモータ単品のデータを上記の換算式で車体の速度に換算し、TOMIX カニ24-100形 補助動力車の調査 で得られている車両走行時のデータに重ねて見た。 調整ボリュームは、高速側の max 状態のみである。
結果は上のグラフに示すように、速度ではおよそ 40 〜 60Km/h 程度も差がある事が判る。 電流でも 40 〜 50mA も違っている。 配線途中の電圧降下や車輪のスリップなどの影響があると思われるが、この差の大部分は駆動系の摩擦抵抗と見ている。 摩擦によってモータの抵抗が増えると、その回転数はダウンし、さらに電流値も上がってしまう結果が、グラフに明確に表れたと解釈すべきであろう。
先回の動力特性を測定した際、牽引力・速度特性を見ていて、これは摩擦抵抗が大きい場合のパターンだなと思っていたが、やはりそのようである。 供給電圧が 4 Volt の状態で走行させている場合、本来なら 120 Km/h のスピードが出るはずなのに、メカ部の摩擦抵抗によってモータの回転数が落ち、70 Km/h の速度しか出せていない現象となっている。
● まとめ
有意義なセンサーを手に入れたことで、モータの回転数を簡単に測定する事が出来るようになった。 測定精度や信頼性については、出来上がり品を信用するしかないが、何ら疑問を持っていない。 全面的に信用している。 そして、モータ単品での色々な実験に使用できそうであり、より一層の楽しみ方が増えたようである。 データの蓄積と共に、メカ部の摩擦損失の測定のほかに、モータのトルク特性も測定出来そうなので、次はこれらに挑戦して行こう。
![]()