
鉄道模型実験室 No.290 引出し特性の予備実験
今回の実験を始めた目的は、慣性負荷を与えた時の発進時の状態を実験してみようと考えたからです。その実験装置が完成したので予備実験を実施した。
■ 実験装置の概要
 .
.
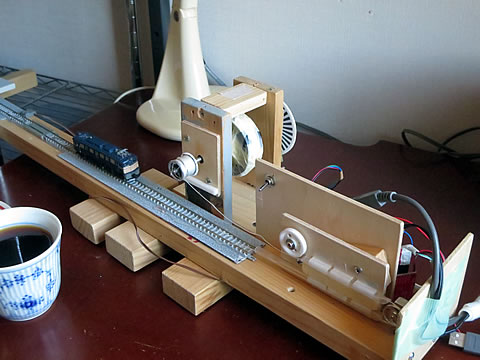
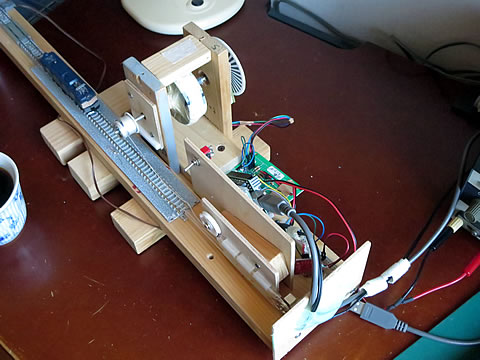
実験装置は、「粘着特性を測定しよう 架線とレールの設置」(2025/9/20)にて使用したレール台を活用し、その右端に工作した慣性体ユニットと引張力測定ユニットを取り付けた。
今回は信号ケーブルを使用しないので、レール台とレール端のレールエンドだけを使用した。レールエンドは線路端から動力車が飛び出すのを防止するためである。
*****************************
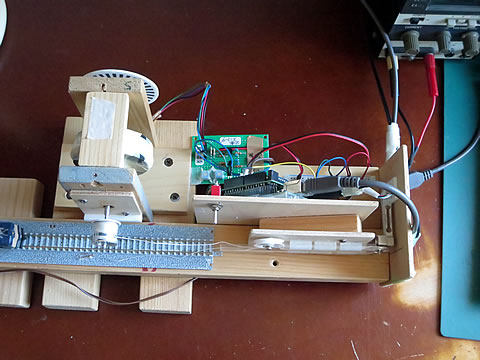
データ処理回路については、下に示す回路図のように、Arduino 用のシールド基板と、直交エンコーダ処理用基板を裏側に設置して配線を実施している。
シールド基板は、「モータの無負荷回転特性を測定する」(2016/6/16)にて工作したもので、その後に実験目的に従って、いろいろ手を加えてきた古参の基盤であるが、今回も活躍をお願いした。
下の回路図には、今回使用する回路だけを描いていますが、実際はもっとゴチャゴチャした回路です。
直交エンコーダ処理用基板は、「直交ロータリエンコーダを作る」(2026/2/25)にて紹介したものです。

.
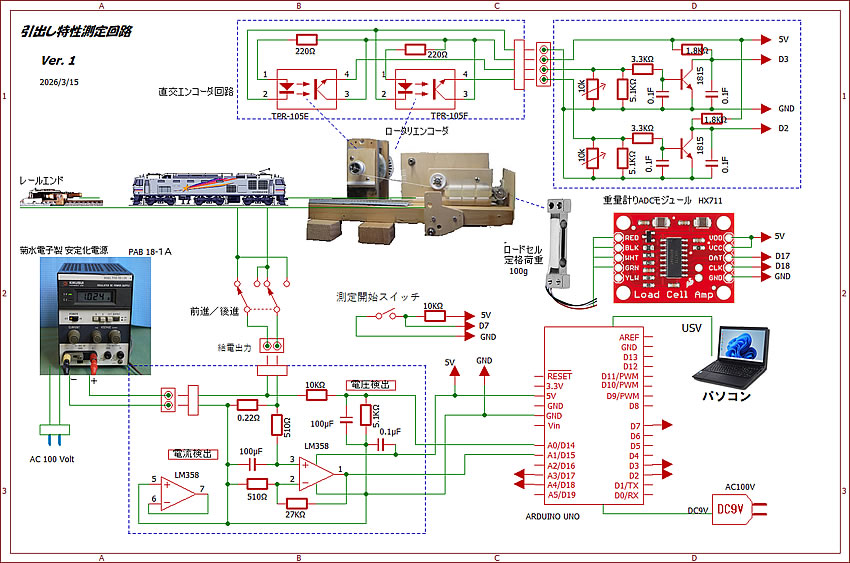
今回使用したデータ処理回路を下に示す。
// Hikidasi-1 2026/3/12
// 引出し特性測定 エンコーダ使用
// 割込み D2 D3
// HX711.DOUT-PIN D17
// HX711.PD_SCK-PIN D18
#include <HX711.h>
#define PIN_A 2
#define PIN_B 3
#define LEDY_PIN 10
#define LEDG_PIN 9
#define START_PIN 7
#define vol_pin 0
#define cur_pin 1
const int8_t ENCODER_TABLE[] = {0,-1,1,0,1,0,0,-1,-1,
0,0,1,0,1,-1,0};
volatile bool StatePinA = 1;
volatile bool StatePinB = 1;
volatile uint8_t State = 0;
volatile long Count = 0;
unsigned long value;
const int LOADCELL_DOUT_PIN = 17; //ロードセル信号
const int LOADCELL_SCK_PIN = 18; //ロードセル信号
HX711 scale;
void setup() {
pinMode(LEDG_PIN,OUTPUT);
pinMode(LEDY_PIN,OUTPUT);
pinMode(PIN_A, INPUT_PULLUP);
pinMode(PIN_B, INPUT_PULLUP);
pinMode(START_PIN,INPUT);
scale.begin(LOADCELL_DOUT_PIN, LOADCELL_SCK_PIN);
attachInterrupt(0, ChangePinAB, CHANGE);
attachInterrupt(1, ChangePinAB, CHANGE);
Serial.begin(115200);
}
void loop() {
long force;
int voltage;
int current;
unsigned long t;
int start;
digitalWrite(LEDG_PIN, HIGH);
start = digitalRead(START_PIN);
while (start == HIGH) { // スタートスイッチを待つ
start = digitalRead(START_PIN);
}
digitalWrite(LEDY_PIN, HIGH);
t = micros(); // 測定時刻
update_value();
voltage = analogRead(vol_pin);
delay(2);
current = analogRead(cur_pin);
delay(2);
force = scale.read();
String buf = String(t)+","+String(voltage)+","
+String(current)+","+String(value)+","+String(force);
Serial.println(buf);
digitalWrite(LEDY_PIN, LOW);
delay(10);
}
void ChangePinAB(){
StatePinA = PIND & 0b00000100;
StatePinB = PIND & 0b00001000;
State = (State<<1) + StatePinA;
State = (State<<1) + StatePinB;
State = State & 0b00001111;
Count += ENCODER_TABLE[State];
}
void update_value(){
noInterrupts();
value = Count;
interrupts();
}
また、Arduinoのプログラムであるスケッチの記述内容を右に示す。内容としては、
- ロードセル信号を処理するために、HX711ライブラリーを使用する。
- 直交エンコーダを処理するため割込み処理とその関数処理を組み込んだ。
を設定しており、メインループ内では、
- 測定開始スイッチがONの状態、即ちLOWの場合であること。
- 測定時の時刻を取得する。
- エンコーダによってインクリメントされた回転角を取得する。
- 電圧とと電流を取得する。
- ロードセルのデジタル値を取得する。
- これらの値を送信する。
- ループ時間の調整。
を実施するように設定している。
■ 実験方法
最初に、測定する動力車を線路上にセットし、カプラーに牽引用糸の金具を取り付ける。糸のたるみが無いように慣性体を回しておき、電源をスタンバイさせる。
次に、Arduinoとパソコンとは、USBを使用してシリアル回線を使って通信させる。パソコン側ではExcel を開き、Data Streamer を設定しておく。ボーレートは 115200 、データの間隔は 10 ミリ秒とし、データ行はおよそ1000~2000行に設定し、入力データのシートにてデータの開始をクリックしておく。
つぎに、測定開始スイッチをいれてデータが取り込まれているのを確認後、動力車をスタートさせる。充分な距離を走行後、電源スイッチをOFFにして、データの取り込みも中止する。
Excel ファイルは保存後に、データをチェックして、必要な換算や計算を行って、グラフに表示させる。
■ 実験結果
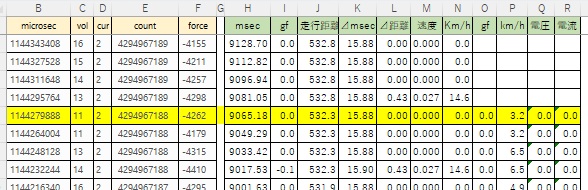
今回のテスト走行には、ED62-15号機を選び走行させた。データを記録したExcel ファイルにて下に示すように計算処理を実施する。
- 時刻測定はmicrosec で取り込んでいるので、msec に換算する。
- ロードセルからのデータ force から引張力に換算する。
- 累積パルス数 count より走行距離を計算する。今回使用した巻取りドラム径はφ17.5mm なので、分解能は 0.430mm/パルスである。
- 時刻データ msec の差分として、⊿msec を計算する。15.88msec と狙いどうりの間隔で測定していることが分かる。
- 走行距離データの差分として、⊿距離を計算し、距離を時間で割って速度を計算する。
- この速度データをスケール速度のKm/h に換算する。
- これらの差分データは、デジタルデータの限界としての離散値を呈している。そこで、前後それぞれの4個と自分自身を含めた9個のデータの平均を計算して、引張力、速度、電圧と電流を計算した。黄色で示す行である。
● グラフによる表示
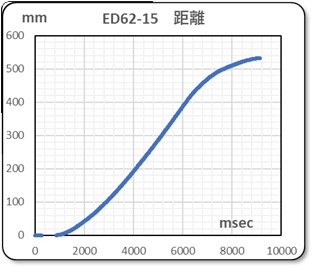
データを眺めていても理解できないのでグラフに表示した。まず最初に走行距離を下左のグラフに示す。発進後、速度を速めて最後には減速して停止している様子を明白に、かつ綺麗に表示している。
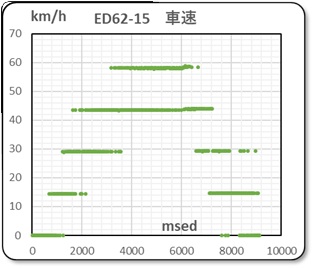
しかし、距離の差分から換算した速度データは、見事な離散値を示している。これではデータとして意味をなさないのである。
そこで、上記で計算した前後9個の平均値を使ってグラフ化したものを下に示す。
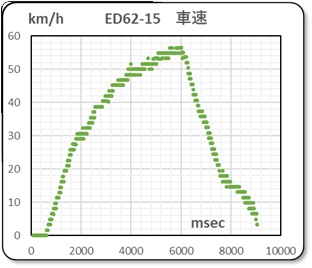
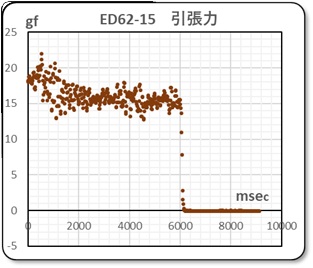
このグラフであれば、車速の様子が観察できる。そして、平均化処理を実施していない引張力のデータを右のグラフに示す。データはかなりばらついているが、動力車の状態なのか、牽引している糸の弾性なのか、あるいはロードセルの問題なのかは解明していないが、今までの測定経験より、仕方のない現象ととらえている。対応としてはデータを平均化する手段で実施してきた。
 .
.
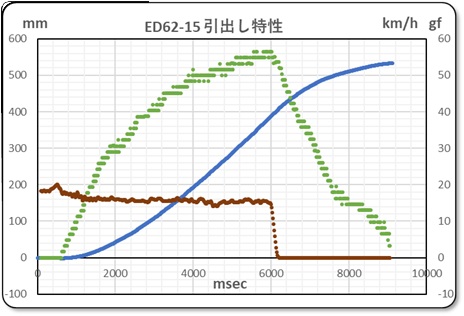
ところで、走行距離のデータは車両そのもののデータでは無いのである。慣性体の累積回転角を換算しているだけである。これは、牽引する糸が緊迫状態ではOKなのであるが、車両が減速して速度が落ちてくると慣性体の回転の方が速くなり、糸がたるんでくるのだ。この状態では、車両の走行距離とは言えないのである。
その切替ポイントを判別する方法は簡単である。速度変化でも判別できるが、糸の引張力を見れば一目瞭然である。、
そこで、これらの特性をひとつのグラフにして表示したのが左のグラフである。
**************
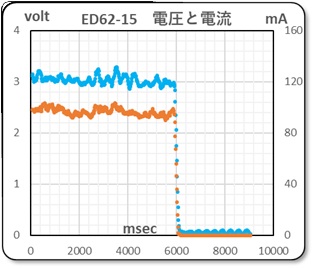
また、電圧値と電流値についても右に示す。
■ まとめ
今回の予備実験により、動力車の引出し特性が測定できることは確認できた。
でも、期待したようなデータとは行かなかった。本来なら「粘着特性を測定しよう 本格的な測定を始める」(2025/10/3)などに示すようなすべり率に対する引張力を観察したいのであるが、このためには動輪の回転状態をセンシングしなければならないだ。この測定はかなり厄介なので、その前に通常の引張力と車速の関係を示す特性を計測したのである。
この特性は、当初から追求してきた特性であり、測定したED62-15号機の昔の測定データと比較することにした。下左のグラフは、引張力と車速の関係をプロットしてグラフに示したものです。0グラムのプロット点は、糸がたるんでしまった時のデータなので無視してください。

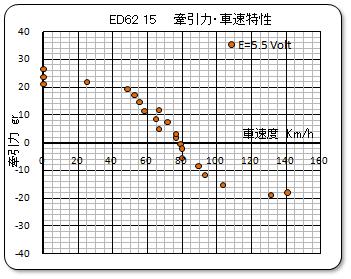
ここでミスしたことに気が付いた。昔のデータが古すぎて、測定方法が駆け出し時期の初期のデータしか無かったのである。今回の実験では低速領域での状態を示していますが、時速 50km/h 以上では測定されていませんでした。このため、新旧二つのデータの重なり部分が少ないので、それぞれお互いを補間しているとは断言できません。引張力がセロになるまで、もう少し長く測定するのか、あるいは回転抵抗とバランスして一定速度状態を維持するのかは、今後の要検討課題です。
でも、注目するポイントは極低速域での引張力の状態なのです。以前の粘着特性の測定でも注目していた特性パターンの傾向について、期待に反してやや右下がりの特性の様です。μカーブのような傾向が見られませんでした。
*****************************************
なんとか引出し特性を測定できるようになったので、今後はN増し測定を実施していくことにします。
2026/3/16