
鉄道模型実験室 No.297 慣性円盤の補強
引出し特性という現象を観察しているが、実験装置の摩擦トルクの低減と回転ムラの改善に取り組みました。その改善効果は確認されたので、予想していた慣性円盤の慣性能率の補強を実施する。しかし、またもや新な問題が発生してしまった。
■ 慣性円盤の補強
先回の実験で、慣性円盤の慣性能率が覚悟はしていたが、やはり小さいことが判明した。そこで、その補強を実施した。まず、重量戸車の外周に厚紙を巻き付けて外壁とした。この内側のスペースに、ストック品であった色々な錘を詰め込んだ。これらのストック品は車両の加重のために使用していたものである。

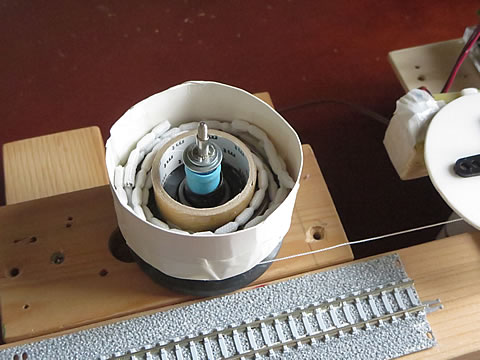
さらに、重宝していた水槽の水草用の重りもありったけ盛りつけた。そして、回転によって飛び出さないように紙テープで止めた。

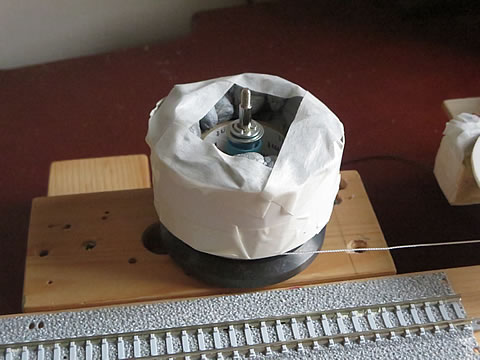
まだまだ不十分と思うが、まずは、この程度の加重で実験してみることにする。次の手は、板状の鉛をこの外周に張り付ける方法も考えている。
■ 引出し特性の観察
この工作の効果を確認するために、テスト実験を実施した。
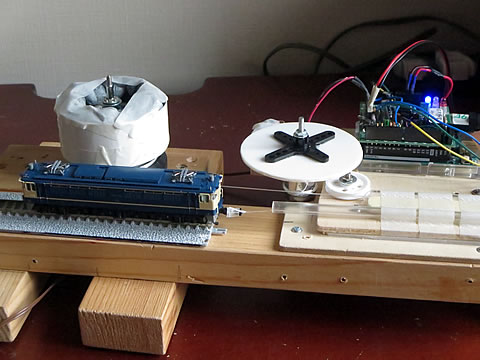
● テストに使用したモデル
 .
.
先回しようしたEF81-119号機は、中古品として入手したものであるが、カプラー部に変な工作が実施さrており、強度不足で破損してしまった。代用品を探したが、適切な対応品が無く諦めて選手交代とした。
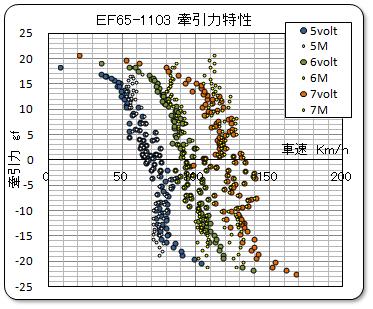
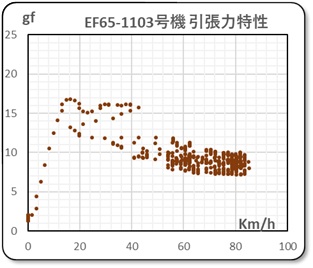
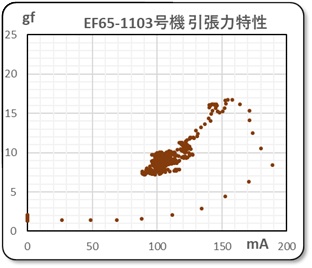
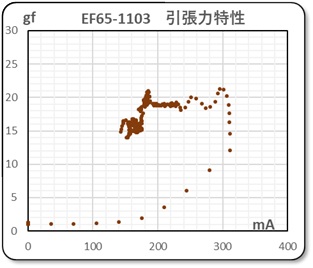
選択したのは、KATO製の品番:3061-1、商品名:EF65 1000 後期形、EF65-1103号機である。このモデルの動力特性図と粘着力特性図をここに再掲載する。
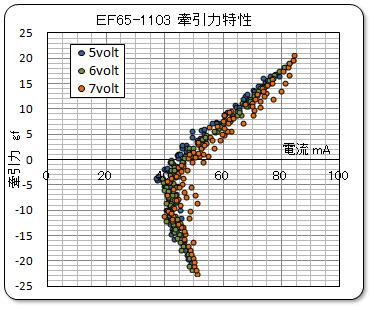
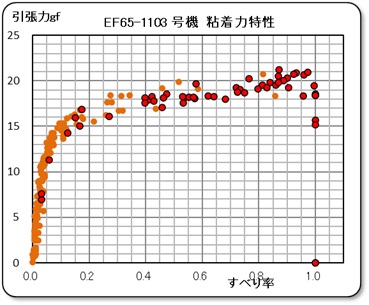
引張力は、15グラフを越えると動輪がスリップが大きくなり、最大では20グラム程度になることは、今までの静特性での測定結果より読み取ることが出来る。
● 電圧によるステップ応答の観察
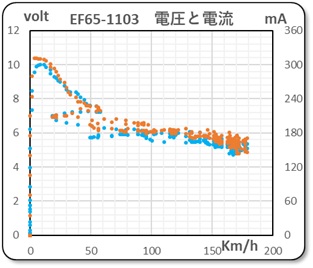
先回と同じように、まず、電圧によるステップ応答(インディシャル応答)による車速とその時の引張力を観察しました。電圧を 10volt に、電流を最大近くに設定して、ヨーイドンの走行を実施しました。電圧は10ボルトに設定したはずでしたが、データを見ると違っていました。なんでだろう?
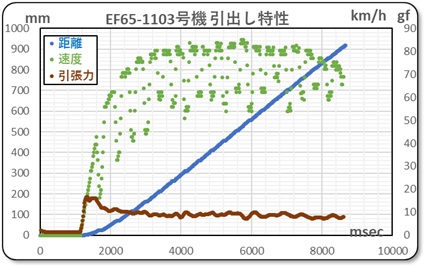
何か速度のでーたが変ですね。やけにバラついています。

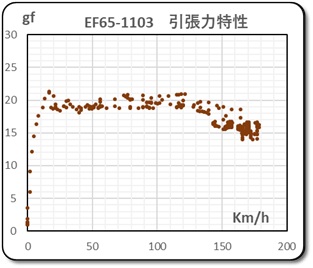
左端のグラフに示す引張力と速度のデータも不思議なパターンを示していました。このデータは平均化処理をしていたので、その処理をしていない元データを中央のグラフに示します。パターンは少し変化しましたが、やはり挙動が理解出来ません。何故だろう?
● 電流によるステップ応答の観察
電流によるステップ応答も観察してみました。電流は中程度のダイヤルにしてヨーイドンの走行を実施しました。

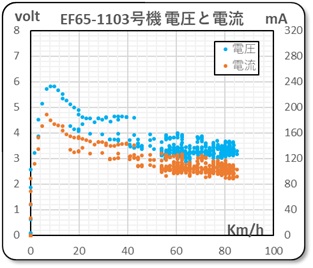
やはり速度のデータがよろしく在りません。電圧と電流のデータも、理解できずに眺めているだです。慣性力の効果があったのかどうかも分かりません。

まさに、子供に測定器を与えたのと同じ状態ですね・・・・・・・・・・・・・・。
*****************************************************
速度データについては、周期的に変化している点に注目して、計算の元となった時刻データの差分(⊿msec )と、エンコーダの回転位置のデータ、即ちパルス数の差分(⊿count )をグラフにしてみました。下左のグラフです。


グラフからは、パルスカウントのデータがおかしいことが分かります。差分でゼロの場合がある・・・・・・・? そこで、横軸をインクリメントされているパルス数( count )にしてグラフ化しました。上右のグラフです。
するとパルスがおよそ 100 毎にゼロに落ち込んでいることが分かります。エンコーダの白黒パターンは1回転当たり32個で、直交方式での読み取りですのでその4倍、即ち、1回転当たり128個のパルスが出ているはずです。このことより、原因はパルスカンターにあると断定しました。
パルス変化がゼロという事はパルスを検出していないのです。従ってこの間はパルスのインクリメントされません。パルスを検出しなかったのは、円盤の白黒パターンが遠くなって反応しなくなった・・・・・・・。これは、円盤の反り、あるいは傾きによって、センサからの距離が離れてしまったからに違いないのです。
改善は、必須ですね・・・・・・!!
**************************************************
さて、次回はその改善の様子を報告します。 改善!改善!・・・・・・・・・・。
2026/4/8