
丂丂HOME >> 揝摴柾宆幚尡幒丂>丂孹幬戜偺孹幬妏應掕儐僯僢僩偺妑惓
揝摴柾宆幚尡幒 No.175 丂孹幬戜偺孹幬妏應掕儐僯僢僩偺妑惓
丂孹幬戜偺孹幬妏傪應掕偡傞儐僯僢僩偺岺嶌偑廔傢偭偨偺偱丄偙偺應掕僔僗僥儉偺妑惓傪幚巤偟偨丅丂偟偐偟丄偄傠偄傠晄嬶崌偑偁偭偨偺偱丄偁傟偙傟廋惓偡傞昁梫偱偁偭偨丅
仭丂妑惓偺偨傔偺弨旛
丂應掕曽朄偺妑惓嶌嬈偼丄崱傑偱偺嬯楯偑曬傢傟傞偺偐丄偁傞偄偼朅偲側偭偰偟傑偆偺偐偺丄婜懸偲晄埨偑擖傝崿偠偭偨妝偟傒偺嶌嬈側偺偱偁傞丅丂傑偡丄嵟弶偵彴柺偺悈暯忬懺傪妋擣偟偰偍偙偆丅丂應掕戜偺巊梡応強偑孹偄偰偄偰偼尦傕巕傕側偄偺偱偁傞丅
丂悈弨婍傪帩偪弌偟偰僠僃僢僋偡傞丅丂嵍塃傪擖傟懼偊偰傕僺僞儕偲悈暯傪帵偟偰偄偨丅丂偝偡偑偵僩儓僞儂乕儉偝傫偱偁傞丅


丂師偵僗儅儂偺孹幬妏應掕傾僾儕傕僛儘揰妑惓傪幚巤偟偰偍偙偆丅丂偦偟偰丄嶌嬈偵昁梫側攝慄椶傪應掕戜偺掙偺寠偐傜奜偵庢傝弌偟偰偍偔丅丂僔僗僥儉偺揹尮傛偆僐乕僪丄柾宆幵椉傪憱峴偝偣傞媼揹慄丄偍傛傃Arduino 偐傜偺僔儕傾儖捠怣傪庢傝弌偡UBS僐乕僪偱偁傞丅


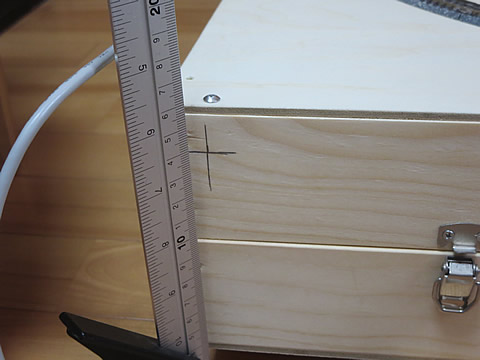
丂妑惓偵昁梫側婡婍傪壓偵帵偡丅丂僲乕僩僷僜僐儞丄埨掕壔揹尮丄僲乕僩丄偦偟偰崅偝傪應傞僗働乕儖偱偁傞丅


丂偙偺僗働乕儖偼丄孹幬戜懁柺偵報傪偮偗偨廫帤慄偺億僀儞僩崅偝傪應掕偡傞傕偺偱丄應掕戜偺椉抂偺丄偦傟偧傟20mm 偺埵抲偵婰擖偟偰偄傞丅丂偙偺億僀儞僩娫偺挿偝偼挌搙 1,060mm 偱偁偭偨丅丂彴偐傜偺崅偝偼丄 135mm 偱偁傞丅

丂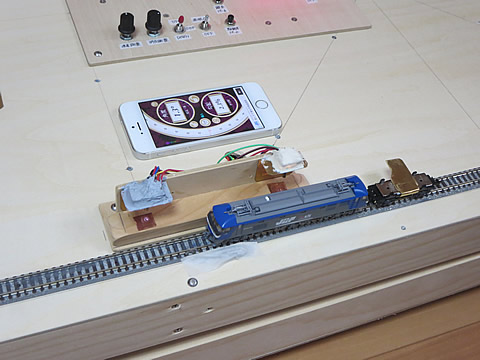 丂.
丂.
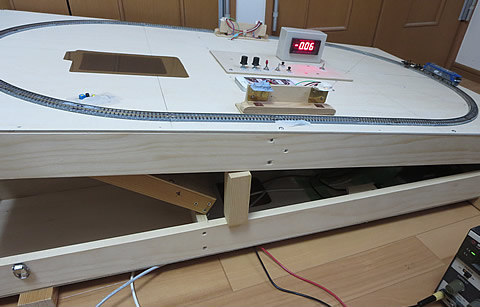
丂妑惓曽朄偼丄塃偺幨恀偺傛偆偵摦椡幵傪巊偭偰應掕梡愱梡戜幵傪尅堷偝偣丄應掕僎乕僩傪捠夁偝偣偰 Arduino 偐傜應掕僨乕僞傪憲怣偝偣傞丅丂摦椡幵偑廃夞楬傪堦廃偡傞偙偲偵媼揹僗僀僢僠傪ON/OFF 偝偣偰孹幬戜傪彮偟偢偮忋徃偝偣偨傝壓崀偝偣偨傝偡傞丅
丂摦椡幵庤掆巭偟偰偄傞忬懺偺偲偒偵丄僔儕傾儖儌僯僞偵昞帵偝傟偰偄傞憲怣偝傟偨僨乕僞傪撉傒庢傞丅丂偦偟偰丄孹幬戜偺椉懁偺廫帤慄偺億僀儞僩崅偝傪撉傒庢偭偰僲乕僩偵婰擖偡傞丅
丂偙偺嶌嬈傪弴師恑傔偰僔僗僥儉偺慡斖埻傪應掕偟偰峴偔丅
仭丂應掕偺僩儔僀
丂嵟弶偵丄偳偺傛偆側嬶崌側偺偐帋偟偵嶌摦偝偣傞偲丄僛儘揰偺埵抲偑應掕奜偺埵抲偱偁偭偨偙偲偲丄應掕搑拞偱應掕忋尷偵払偟偰偟傑偭偰偄偨丅丂僛儘揰埵抲偼儗僶乕偺愝掕傪曄峏偡傞偙偲偵偡傞傕丄應掕忋尷丄懄偪壜曄掞峈婍偐傜偺傾僫儘僌揹埑傪AD曄姺偟偨僨僕僞儖抣偑丄746偱摢懪偪忬懺偵側偭偰偄偨偺偱偁傞丅
丂偙傟偼丄Aruduno 偺AD曄姺偱偼1024 傑偱峴偗傞偺偱偁傞偑丄搑拞偱怣崋傪憹暆偟偰偄傞僆儁傾僢僾偺忋尷偵堷偭偐偐偭偰偄傞偺偱偁傞丅丂乽孹幬妏應掕儐僯僢僩偺惢嶌乿乮2013/3/16乯嶲徠丅
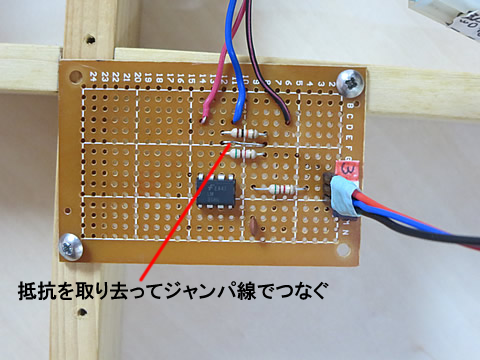
丂偙傟偼丄僆儁傾儞僾偺憹暆棪偑崱夞偺儕儞僋峔惉偵墬偄偰偼揔愗偱側偐偭偨偺偱丄僆儁傾儞僾偺憹暆棪傪掅尭偡傞偙偲偵偟偨丅丂崱傑偱偺憹暆棪偼3.96攞偱偁偭偨偺偱丄弌椡懁偺10K兌偲5.1K兌偺捈楍晹暘偐傜丄5.1K兌偺掞峈傪庢傝嫀偭偰丄憹暆棪傪丄
丂丂丂( 5.1 + 10 )/5.1 = 2.96
攞偵偟偨丅丂廋惓岺嶌偼5.1K兌偺掞峈傪庢傝嫀偭偰僕儍儞僷乕慄偱偮側偖偺傒偱偁傞丅丂壓嵍偺幨恀丅丂
仭丂妑惓嶌嬈偺幚巤
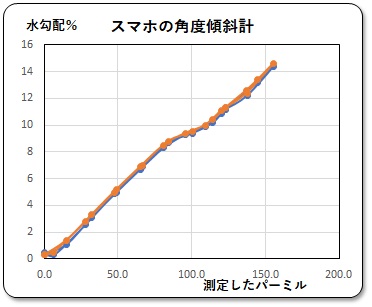
丂忋婰偺庤弴偱妑惓嶌嬈傪幚巤偟偨寢壥傪壓偵帵偡丅丂僲乕僩偵彂偒巭傔偨僨乕僞傪Excel 忋偱張棟偟丄廫帤億僀儞僩偺崅偝僨乕僞偐傜孹幬戜偺岡攝傪僷乕儈儖丄懄偪1/1000偺岡攝偱昞帵偝偣偨丅
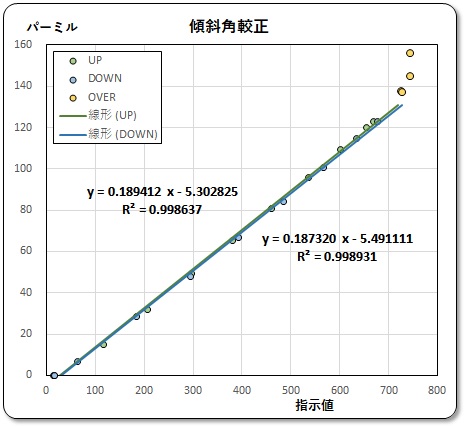
丂忋徃帪乮UP乯偲壓崀帪乮DOWN乯丄偍傛傃嬱摦憰抲偺尷奅埲忋偼壓嵍偺幨恀偺傛偆偵庤摦偱帩偪忋偘偨忬懺乮OVER乯傪暿乆偵僾儘僢僩偟偨丅丂忋嵍偺僌儔僼丅丂僆儁傾儞僾偺尷奅偼側傫偲偐僙乕僼偱偁偭偨丅丂傑偨丄忋徃帪偲壓崀帪偺嵎傕傎偲傫偳柍偄傛偆偱偁偭偨偺偱丄傑偲傔偰僌儔僼偵偟偨偺偑忋塃偺僌儔僼偱偁傞丅
 丂丂丂
丂丂丂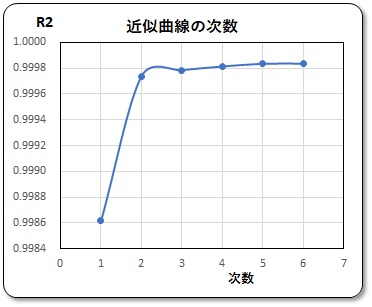
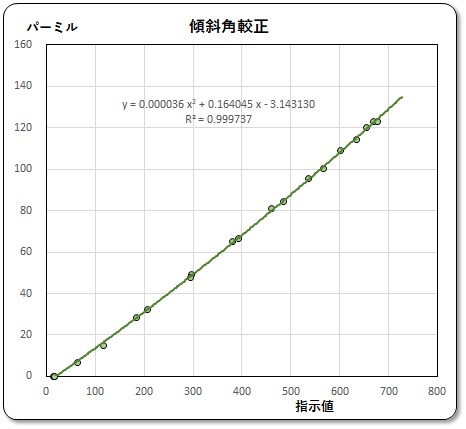
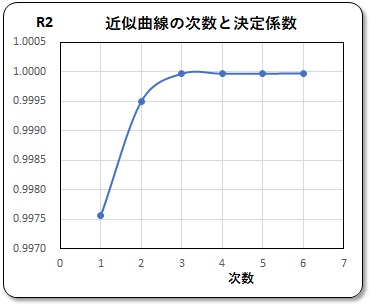
丂偙偺僌儔僼傪尒偰偄偰丄捈慄嬤帡偱偼傛傝傕師悢嬤帡偺傎偆偑偟偭偔傝偲偄偔偺偱偼側偄偐偲巚偄丄俀師嬋慄側偳傪摉偰偼傔偰傒偨丅丂偙偺帪拲栚偟偨偺偼丄僺傾僜儞偺寛掕學悢 R-俀忔抣偱偁傞丅丂侾師傛傝傕俀師嬋慄偺傎偆偑偙偺R2 偺抣偑崅偄丄懄偪憡娭偑崅偄偲尵偆偙偲偱丄妑惓幃偲偟偰偼偙偪傜傪嵦梡偡傋偒偱偁傞丅丂僨乕僞偼恀拞偱彮偟墯傫偱偄傞忬懺側偺偱偁傞丅丂儕儞僋峔憿側偺偱旕慄宍偲側傞偺偼摉慠偱偁傞偺偩丅丂傑偨丄俁師傛傝崅偔偟偰傕傎偲傫偳曄傢傜側偄偺偱丄幃偼娙扨側曽偑椙偄偺偱偁傞丅
仭丂嶲峫偲偟偰僗儅儂偺傾僾儕傕専徹偟偨
丂曋棙側僗儅儂偺傾僾儕偱傕摨帪偵應掕偟偰偄偨偺偱偦偺僨乕僞傪傑偲傔偰傒偨丅 丂壓偺僌儔僼丅
 丂丂丂丂
丂丂丂丂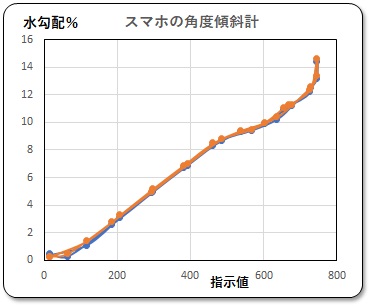
丂擇偮偺慄偑廳側偭偰偄傞偑丄庤慜懁偲墱懁偺孹幬傪應掕偟偨偑丄0.2亾傎偳嵎偑偁偭偨偑尨場偼傛偔傢偐傜側偄丅丂偦傟偵偟偰傕側傫偩偙偺嬋慄偲尵偄偨偄偹丅丂搑拞偱僙儞僔儞僌僎僀儞偑曄壔偟偰偄傞偺偱偼側偄偐偲巚傢傟傞丅丂偙偺僌儔僼傪尒偰丄傾僾儕偺怣棅搙偼棊偭偙偪偨偹丅丂偙傟偐傜偼嶲峫掱搙偵偟偰偍偙偆丅
仭丂曗彆僼儔僢僷偺岠壥
丂徃崀嬱摦憰抲偱側偔偰丄庤摦偱孹幬戜傪帩偪忋偘偨応崌偱傕孹幬妏傪應掕弌棃傞傛偆偵曗彆僼儔僢僷傪愝偗偰偄傞偑丄偙偺応崌偺僙儞僔儞僌僨乕僞偺妑惓傕幚巤偟偨偑丄偦偺偹傜偄偼摨偠妑惓抣偱應掕弌棃傞偐偳偆偐偱偁傞丅
丂妑惓曽朄偼忋婰偲摨偠偱偁傞偑丄曗彆僼儔僢僷傪嶌摦偝偣傞偨傔丄徃崀嬱摦憰抲偱偁傞偲偙傑偱摦偐偟丄偦偙偐傜偼庤摦偱帩偪忋偘偨丅丂帩偪忋偘偺曐帩偼妏嵽傪寗娫偵姎傑偣偰曐帩偟偨丅丂壓偺幨恀丅

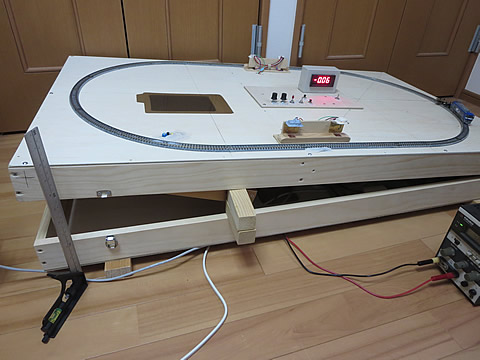
丂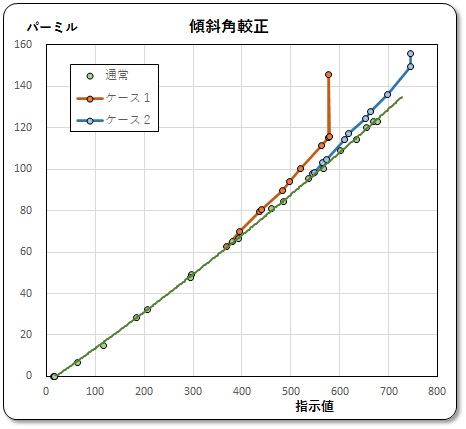 丂.
丂.
丂應掕寢壥傪塃偺僌儔僼偵帵偡丅丂僗僞乕僩埵抲傪曄偊偰働乕僗侾偲働乕僗俀偲偟偰昞帵偟偰偄傞丅
丂曗彆僼儔僢僷傪嶌摦偝偣峴偔偲丄捠忢偺儔僀儞偐傜偩傫偩傫棧傟偰偄偔帠偑暘偐傞丅丂偙傟偱偼偦傟偧傟偺僗僞乕僩埵抲偺忣曬偑柍偄偲丄惓妋偵偼捛偭偰偄偗側偄偺偱柺搢側帠偵側傝偦偆偱偁傞丅
丂丂丂彮偟婥妝偵峫偊偰偄偨偑丄傗偼傝懯栚偺傛偆偩丅
丂奺僼儔僢僷偺巟揰偺埵抲偲丄孹幬戜偵愙怗偡傞埵抲側偳傪尩枾偵崌傢偣側偄偲妑惓嬋慄偼堦抳偟側偄偺偩丅丂摉慠偲尵偊偽摉慠偱偁傞偑丄傕偆彮偟偛傑偐偣傞偲巚偭偰偄偨偺偱偁傞丅
丂懯栚偩偲敾抐偟偨偺偱丄偙偺曽幃傪曻婞偟偨丅
仭丂夵椙埬偦偺侾
丂曗彆僼儔僢僷偑懯栚側傜徃崀嬱摦梡偺僼儔僢僷偵儘僢僪偺抂晹傪愙懕偟偰丄孹幬妏傪偡傞傋偔峔惉傪壓偺幨恀偺條偵曄峏偟偨丅
丂偟偐偟偙偺埬傕偡偖偵曻婞偟偨丅丂棟桼偼丄儘僢僪偑僼儔僢僷偺嬝岎偄偵姳徛偟偰僾儔僗僠僢僋偺儗僶乕偑嬋偑偭偰偟傑偆偺偱偁傞丅丂儘僢僪抂晹偺屌掕埵抲傪庤慜偺曽偵堏摦偝偣傞偲姳徛偼柍偔側傞偑丄儕儞僋峔惉偲偟偰偼偐側傝偺堎宍偲側偭偰偟傑偆丅
丂偦偙偱丄捈娤揑偵敾抐偟偰偙偺埬傕曻婞偟偨丅


仭丂夵椙埬偦偺俀
丂師偵幚巤偟偨偺偼丄儘僢僪抂晹傪捈愙孹幬戜偵屌掕偡傞曽朄偱偁傞丅丂偙傟偼丄摉弶偐傜峫偊偰偄偨曽朄偱堦斣妋幚側曽朄側偺偩丅丂偱傕嵟戝偺寚揰偼丄孹幬戜傪梕堈偵奐偔偙偲偑弌棃側偔側傝丄孹幬戜棤懁偵愝抲偟偰偄傞奺婡婍偺儊儞僥僫儞僗偑晄壜擻偲側傞丅丂偙傟偼丄儘僢僪偺挿偝偑抁偄偨傔丄孹幬戜傪傢偢偐偟偐帩偪忋偘傜傟側偄偺偱丄儊儞僥僫儞僗偺偨傔偵偼偙偺儘僢僪偺屌掕傪偄偪偄偪暘夝偡傞昁梫偑偁傞偺偩丅丂
丂偙偺條側晄曋傪夝徚偡傞偨傔岺晇偟偰偒偨偺偱偁傞偑丄丂壓庤側峫偊媥傒偵偵偨傝両丂丂斲丄柍懯崪偱偁偭偨偺偩丅丂崱屻偺傾僀僨傿傾偵婜懸偟偰崱夞偼偲傝偁偊偢偙偺曽朄傪嵦梡偡傞偙偲偵偟偨丅丂暘夝梕堈偺偨傔偵挶僫僢僩傪巊偆掱搙偺攝椂偱偁傞丅丂壓偺幨恀丅




丂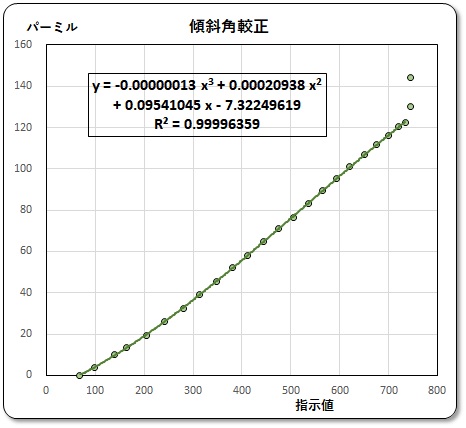 丂.
丂.
丂忋婰摨偠傛偆偵妑惓嶌嬈傪幚巤偟偨寢壥傪塃偵帵偡丅丂僛儘揰偺埵抲偲僆儁傾儞僾偺尷奅揰偼丄挌搙椙偄嬶崌偵側偭偰偄偨偺偱丄偙偺忬懺偱崌奿偲偟偨丅
丂傑偨丄妑惓偺偨傔偺嬤帡幃偼丄崱夞偼3師幃偑嵟揔偲敾抐偟偨丅
丂孹幬妏偺彫偝偄僝乕儞偺旝柇側旕慄宍嬶崌偑偆傑偔儅僢僠偟偰偄傞偺偑暘偐傞丅
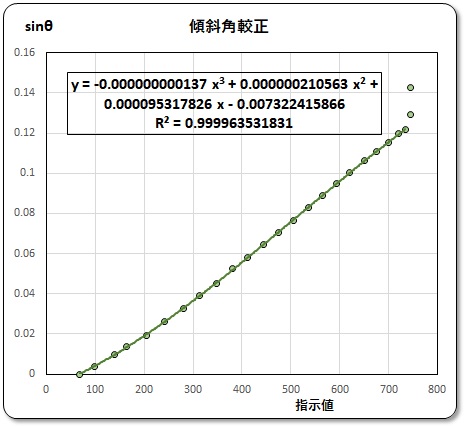
丂側偍丄孹幬偺忬懺傪棟夝偟傗偡偔偡傞偨傔僷乕儈儖昞帵偱愢柧偟偰偒偨偑丄應掕偝傟偨孹幬妏偐傜尅堷椡傪寁嶼偡傞応崌偵偼丄僷乕儈儖偱偼側偔偰 sin兤偺抣傪巊梡偡傞偺偱丄偙偪傜偺曄悢偱偺妑惓幃傪帵偟偰偍偔丅
丂丂偙傟偱孹幬妏偺妑惓偼OK偲偟偨偺偱丄師偼揹埑偲揹棳應掕偺妑惓傪幚巤偡傞丅
儁乕僕僩僢僾傊栠傞丂丂.
丂2020/10/2丂嶌惉