
HOME >> 鉄道模型工学 > 動力特性の測定の自動化 > 傾斜角測定ユニットの製作
鉄道模型工学 動力特性の測定の自動化 傾斜角測定ユニットの製作
■ 傾斜角測定ユニットの製作
動力性能の測定において、動力車の牽引力測定は重要な測定項目である。 今まで、いろいろな測定方法を検討してきたが、傾斜台方式が一番安定して計測出来る方法であると判断している。 その測定方法は、測定台の傾斜角を測定して、動力車の重量と重り車両の重量から勾配抵抗を計算し、これを動力車の牽引力として算出するものである。 このためには、測定台の傾斜角を測定する必要があり、その方法として、最初のシステム構成の項でも紹介した。 即ち、
レバーと可変抵抗器(いわゆるボリューム)で回転角を検出する方法で考える事にした。 この場合、レバー機構の構成から、回転角は90度以内しか取れないだろうと思われる。 可変抵抗器の回転角は300度近くもあるので抵抗の可変範囲の 90度/300度=3/10 しか使わない事になる。 「登り坂の手助け」対策も考えながら、可変抵抗器をダブルで使ったらどうかなどあれこれ悩んだ。 しかし、より簡単なシステムにするために、傾斜台を手で持ち上げた時はキャンセルスイッチを働かせ、可変抵抗器の使用範囲の問題は、オペアンプを使って増幅することにした。 可変抵抗器の両端に基準電圧の 5Volt を掛けて、スライド部の電圧を取り出し、 ArduinoのA/D変換に掛けるためにオペアンプで増幅させておくのである。 リンク機構による非線形性は EXCEL 上で補正すればよいと考えている。
この構想に従って、傾斜角測定ユニットを製作したので、このに報告しよう。
まず、角度検出のセンサは、回転式の可変抵抗器を使用する。 イメージ的にサイズの大きい方が良いのではと考えて、φ24mm の10kΩ、B 特性のボリュームを選定した。 東京コスモス電機製、【RV24YN20SB103】RV24YN型 10kΩ 、¥399.- である。 機械的回転角度は300度である。 回転寿命は 15,000 回とのことであるので、充分であろう。 それ以外の部品は、ジャンク箱から探し出してきた材料で対応している。 まずレバーは、厚さ 3mm のプラ板を整形し、ボリューム軸に嵌るφ6mm の穴を明け、ボリューム用のつまみの底面と瞬間接着剤で固定する。 つまについているネジによって、ボリュームの軸とは任意の角度位置で固定出来る。 レバーの先端には、やじろべい式牽引力計で使用した「タミヤ製楽しい工作シリーズ、No.171、 3mmネジシャフトセット」 の残り部品であるピロボールナットとアジャスターを使用した。 また、ロッドは、同じく残部品のネジシャフトを切断して使用する。 このピロボールを使ったため、ジョイント部のガタはゼロに抑える事が出来ている。 レバーの長さは取りあえず 100mm とした。 下左のこれらの部品を示す。
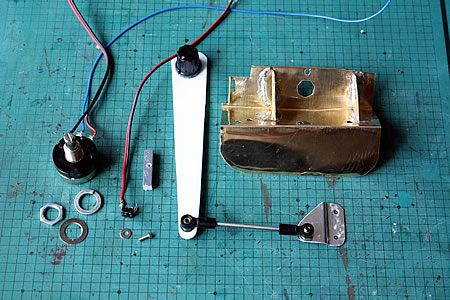
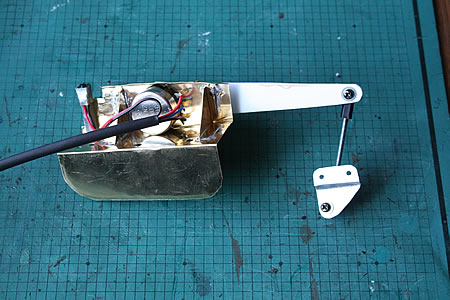
ボリュームを保持する台は、ジャンク箱にあった適当な大きさの0.3mm の真鍮板を活用し、クランクガタに細工したが、剛性が不足していたので補強壁を2ヶ所ハンダ付けした。 キャンセル用のスイッチは 5mm 各のプラ棒の先に接着し、保持台とはスライドによって高さを調節できるようにしている。 これらの部品を組付けた状態を右上にしめし、レバー側から見た状態、上から見た状態を下に示す。


■ 測定台への取付
次にこの検出部を測定台に取り付けた様子を下にしめす。 検出部は中間の台枠に固定し、ロッドの固定部は下側の台枠に固定している。 下左の写真。 傾斜台が折りたたまれた傾斜角ゼロの状態でのレバーとロッドは、右の写真の状態になる。 この時、キャンセル用スイッチも接触するように位置を調整して固定する。


傾斜台が持ち上がると、下の写真の様にレバーは回転し、左が中間位置、右が最大位置の状態である。 この中間位置でレバーとロッドがほぼ直角となる位置にロッドの固定側の位置を決めている。


■ 回路部の作成
次に、オペアンプを含めた回路部分を作るためにボリュームの抵抗を測定した。
傾斜角ゼロの状態からの立ち上り時の抵抗値は、不感帯の部分があったり、またすっきりと立ち上っていない様でもあった。 また、オペアンプも同様にゼロ電圧での不感帯もあるため、ゼロ点は、下駄を履かせて少し上げる事にした。 ボリュームのつまみ部分のネジをゆるめ、ボリュームを少し回した状態で、傾斜角ゼロを設定する。 この時の抵抗値は430Ωであった。 即ち、傾斜角ゼロでも 5Volt×0.43k/10k = 0.2Volt 程度は出ていることなる。 傾斜角の場合は、ゼロ位置から正確に測る必要があるため、この様な配慮を行ったが、同じオペアンプを使用する電流測定の場合は、ゼロ電流から測定することは無いので、心配する必要はないであろう。
次に傾斜台をおよそ200パーミルに設定しボリュームの抵抗値を測定すると、2800Ωであった。 従って、ボリュームの出力電圧は、5Volt×2.8k/10k = 1.4Volt となる。 この結果、オペアンプの増幅率は、約3.5倍必要となる。 そこで、5.1kΩと 10kΩ+5.1kΩを使用して 20.2/5.1=3.96 倍の増幅率になるように回路を組むことにした。
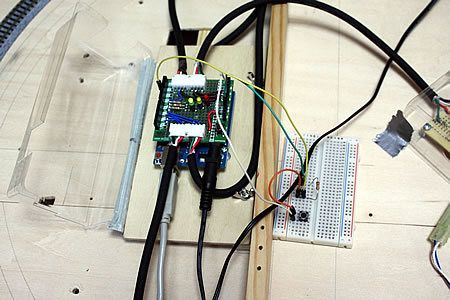
組み上がった回路を測定台に固定した状態を下の写真に示す。
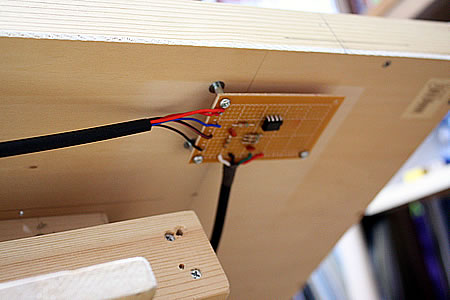

角度検出部とArduino を搭載しているセンターユニットとの間の配線状態を下に示す。

■ 傾斜角測定の較正作業
角度検出ボリュームから出る電圧は、オペアンプでの増幅され、それをArduino がAD変換して出力されるので、実際の傾斜角に換算する必要がある。 そこで実際の傾斜角を測定しながらデータを較正する必要がある。
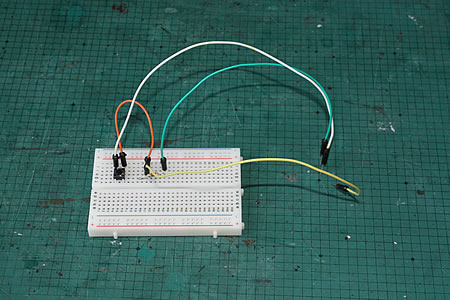
まず、この較正作業を実施するために、先回と同様に押しボタン入力部をブレッドボード上に作り、Arduino の空き端子に入力端子を設けた。
*********** 傾斜角校正 *********************** #define LEDG_PIN 9 #define BASE_PIN 6 #define Button 5 void setup() { pinMode(LEDG_PIN,OUTPUT); pinMode(BASE_PIN,INPUT); pinMode(Button,INPUT); Serial.begin(9600); } void loop() { int angle; int angle_pin = 0; int input_Button = HIGH; int can_button = HIGH; while (input_Button == HIGH ) { input_Button = digitalRead(Button); digitalWrite(LEDG_PIN, HIGH); } angle = analogRead(angle_pin); String buf = String(angle) + ",E"; Serial.println(buf); digitalWrite(LEDG_PIN, LOW); delay(1000); }
◆ スケッチとExcel の修正
今まで作成した中のスケッチを活用して右のスケッチを作成した。 ピン5に設定した押しボタンが押された時に、ゼロ番のアナログ入力を読み取り、パソコンに送信する簡単なプログラムである。
Excel 側も同様に傾斜角測定用に修正する。 角度計測は、測定台の右側のリフト量測定点の高さを物差しで測り、傾斜台の回転中心を示す左のリフト量測定点との距離 900mm により、sinθを求めて較正値の基準とする。 物差しの読み取りは、0.5mm 単位までが限界である。
◆ 角度の較正結果
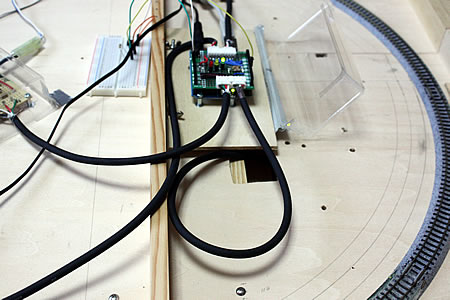
測定時の状態を下に示す。 パソコンは左の机に設置しており、USB ケーブルで接続している。
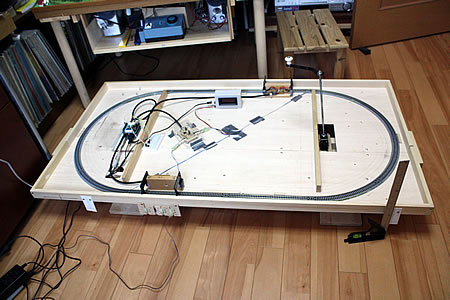
リフト量測定状態を下に示す。 左がゼロ位置、右が中間状態である。


 .
.
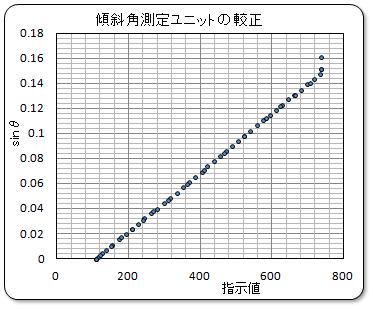
次に、測定結果を右に示す。
横軸には、AD変換された値を取り、縦軸にはリフト量測定から計算されたsinθの値をグラフ化したものである。 まず、その直線性に驚いた。 リンクを使用しているため、かなりの非線形を予想していたのであるが、まさに “まっすぐな” 直線である。 立ち上りは、ゼロ点にゲタを履かせているので予想どうりであるが、上限が約730と低くなっているのは予想外であった。 ここで頭打ちになっているのが判る。
リンクの位置やオペアンプの増幅率を修正すると、AD変換の限界値まで広げる事も出来るが、sinθが約 0.15 即ち150パーミル近くまで測定出来ているので、このままでOK とする事にした。 いや、修正作業をサボっただけなのだが・・・・・・・。
また、測定は角度を増加していく場合と減少して場合の往復で測定しているが、その差は見られなかった。 さらに、傾斜台の上の枠を持ち上げて、キャンセルスイッチの作動も確認し、その後の角度表示の再現性もバッチリであった。
 .
.
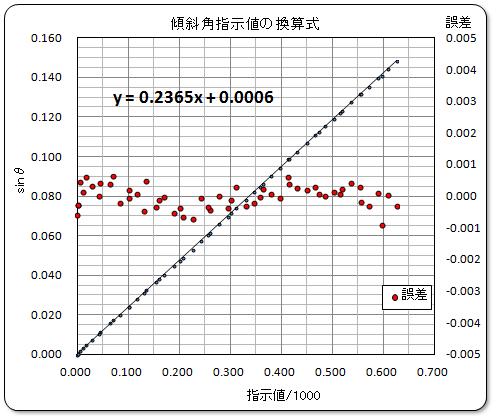
次に、このデータをもとに、AD変換値(指示値)から sinθの換算式を求めることにする。 ここで、ゼロ点のズレを補正しておくことにする。 また、今後の測定時に、水平状態でこのゼロ点を求め、その値をもとにゼロ点補正をするようにExcel の表を修正した。
近似直線とその換算式を示すグラフを左に示す。
ここで、換算式の係数の精度を高めるため、以前でも使ったテクニックとして、横軸と縦軸の表示桁を合わせている。 即ち横軸のデータを 1/1000 にして計算すると、換算式でもっとも重要な比例係数の有効桁が4桁で示されることになる。
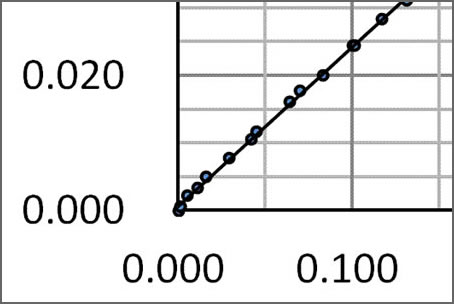
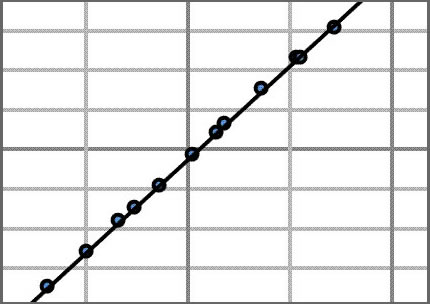
表示されたグラフを見ると、プロット点と近似曲線の位置が微妙に異なっている様にみえる。 そこで、グラフ表示の倍率を400%に拡大して部分的に表示させたのが、下のグラフである。 串団子の様に、近似曲線はプロット点を串刺しにしており、さすがExcel と感心している。 微妙に異なっていたのは、表示上の問題と思われる。
近似直線の直進性について、もうひとつ検証してみよう。 データ値と換算式の差を換算誤差として計算し、左のグラフ上に赤点でプロットしている。 全体的に少し波打っているが、その程度を中間地点で見てみると 1%以下である。 そしてバラツキ具合と同程度と判断される。
 .
.
◆追加実験
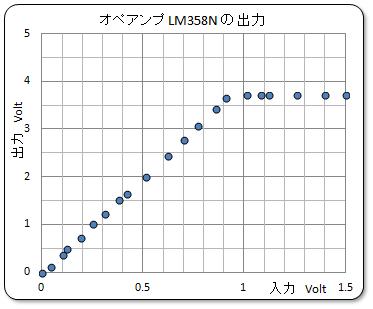
オペアンプの頭打ちについて、ブレッドボードに同様な回路を構成して実験してみた。
回路の電源は 5Volt のACアダプターを使用し、入力側の電圧可変は小型の10kΩのボリュームを使用する。 そして、入出力電圧はテスターを使用して測定した結果を右に示す。
やはり、3.7Volt 近辺で頭打ちとなっていた。 それにしてもみごとな特性である。 それまではしっかりと直線性を保ち、限界となるとピタッと一直線である。
この限界以上で使用するには、オペアンプの種類を変えるか、電源電圧をアップするしかないであろう。 作成したセンターユニットのシールドでは9Voltを使用しているので、これを使用する手もあるが、シールド上のコネクタの位置と配線を見直さなければならないので、今回は無理の様である。
************************************
少し手抜き工事の感もあるが、思ったよりも安定的で、信頼性のある傾斜角測定ユニットが出来たと考えている。 測定限界も 150 パーミル以下で使用していけば問題無いと判断している。
次は、いよいよ牽引力測定にトライしよう。
![]()