
HOME >> 鉄道模型工作室 > 小型のターンテーブル式ジオラマを作ろう ターンテーブルの駆動制御
小型のターンテーブル式ジオラマを作ろう ターンテーブルの駆動制御
小型のターンテーブル式ジオラマを作っています。ベースと回転円盤の工作が出来たので、その駆動制御回路を検討しました。Arduino とモータドライバを使ったPWM制御方式です。
 .
.
■ ターンテーブルの駆動制御回路
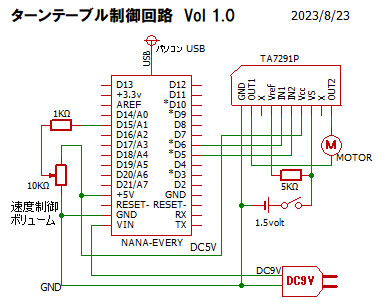
ターンテーブルの駆動制御回路は、マイコンとしてArduino Nano Every を使い、モータドライバはTA7291P を使って構成しました。このモータドライバ回路は、マルツの「TA7291P を使った小型モータ駆動回路」を参考にしました。
マイコン Every の電源は、6〜21ボルトなので9VのACアダプターを使い、入力は10KΩのボリュームを使用したきわめて簡単な回路です。
スケッチの記述を下に示す。ここでは、PWM制御にて回転数を指示する機能に絞って実施しています。
出力の analogWrite は、0〜255のデューティ比として出力されますが、ボリュームの電圧入力はアナログ入力として、0〜1023の整数として取り込まれます。このため、VOL入力値を4で割っておきます。 また、PWM信号の周波数はオリジナルの980Hzのままとしています。
// TurnTable-1
//Arduino Nano Every
// 2023.8.23
#define VOL A1
#define OUT1 6
#define OUT2 5
void setup() {
pinMode(VOL,INPUT);
pinMode(OUT1,OUTPUT);
pinMode(OUT2,OUTPUT);
analogWrite(OUT1,0);
analogWrite(OUT2,0);
}
void loop() {
int vol;
vol=analogRead(VOL)/4;
analogWrite(OUT1,vol);
delay(500);
}
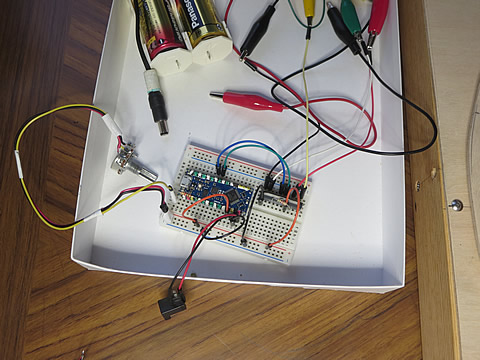
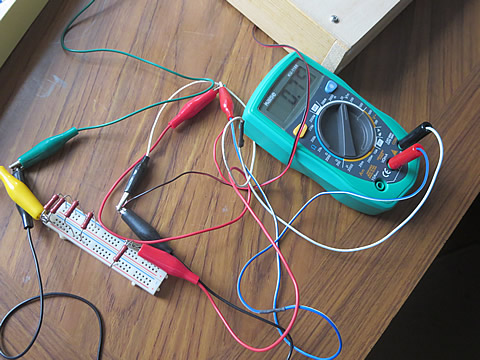
この回路をブレッドボード上に構成して作動確認を行います。
 .
.
● 実験結果
マイコンにプログラムを書き込み、単2乾電池一個使用してモータを駆動させましたが、テーブルはびくともしませんでした。でも、ピーと言うPWM制御の音が聞こえていましたので、マイコンは正常に作動していると判断しました。そこで、テスターを持ち出して出力関係の電圧を測定しました。
.
すると、ポート6の電圧は、ボリュームの変化に合わせて変化しており、正常と判断しました。しかし、モータドライバの出力は、変化するものの、最大でも1ボルト以下でした。これではモータは動きません。
そこで、乾電池を2個にして、モータ駆動用の電源を3ボルトにしたのですが、それでもやっと1ボルトを超えたぐらいです。
*****************************************************
ここで、モータドライバの内部抵抗による電圧降下が発生していることにやっと気が付きました。上記のマルツさんの解説でも、このモータドライバ場合は、入口・出口の部分を合わせて2V程度の電圧降下が発生しますので、3ボルト以上の電源が必要と期されていました。
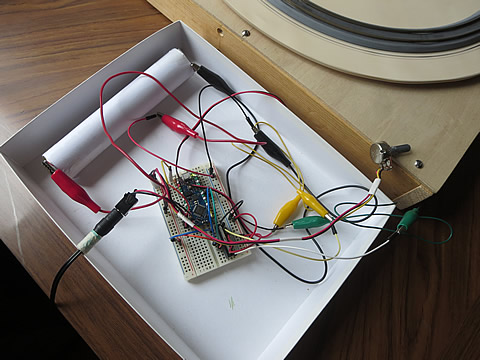
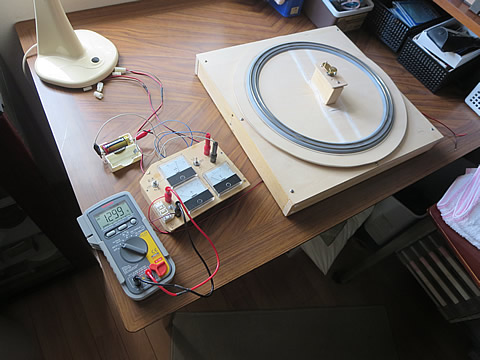
そこで、乾電池3個を使って実験再開です。右上の写真。ボリュームを回すとやっと回転するようになりましたが、動き出しは不安定でした。DCモータの飛び出し起動の影響と思います。
実験の様子を動画で紹介しましょう。

PWM制御のキャリア周波数が 1KHz 程度なので、ピーと言う音が気になります。でも、耳に聞こえない20KHz まで上げることが出来ますので、問題ないのですが、スローでの制御がぎこちないですね。もっとスムーズに制御できると期待していたのですが外れです。
*****************************************************
この、モータドライバはバイポーラ形の集積回路であるため、電圧降下が大きいのではと考えて、低ON抵抗のLDMOS素子を使ったTB6612 使用のドライバに変えて同じように実験しましたが、現象はあまり変わりませんでした。
*****************************************************
この状態では、ターンテーブルの回転制御としては使えるものの、制御しずらい回路となると判断して不合格とし、この方式を諦めることにしました。
● 対応策を模索する
では、どうするか? 模型工作用のモータと減速機構ではまずいのではないかと考え、駆動回路の構成を再検討する必要に責められたのです。でも、せっかくの工作のやり直しにつながります。
- 9ボルトあるいは12ボルト仕様の減速ギヤ付きモータに交換し、模型用のパワーユニットで駆動制御する。でも、メカ部分をどう構成すのか?
- 今の3ボルト使用のマブチモータと同じサイズの9ボルトあるいは12ボルト仕様のモータを探す。アマゾンで探してみたが、写真でみると同じようなサイズの様だが寸法がはっきりしないのが多い。入手して現物を見なければ使用できるのかどうかわからないのだ。
- ・・・・・・・・・アイディア切れ・・・・・・・。
ぼんやりと考えている時に、ふと昔の電車の制御方法を思い出しました。
そうだ!・・・・・・ ノッチ制御だ!
昔の電車の運転は、マイコンなどを使っていなかったのだ。抵抗をズラリと並べてカタカタと選択し、モータをコントロールしていたのだ。この方法であれば、ロータリスイッチと抵抗があれば実現できるのである。電車でなくてターンテーブルの制御なので、何も連続的な制御でなくても良いのである。
ところで、このような方式にするには、どのような抵抗値にすればよいのかを知る必要があります。そこで、現在のメカではどのくらいの電圧と電流が必要とされているのか、実験してみることにしました。
■ ノッチ制御のための寄り道実験
まず、作動時の電圧と電流の状態を調べることにしました。モータの内部抵抗は1Ω程度ですので、これと同程度の抵抗を用意し、モータと直列に接続してモータにかかる電圧を変えてみることにしました。電流が大きくなるのでワット数の大きな抵抗を探しました。
ストック品の中に、12Ω×1W の大きさの抵抗がありましたのでこれを使用しました。この部品はどこかで使用した記憶があるので、報告ページを探してみると、「12m級のEF58の製作」(2010/7/3)にありました。もう10年以上の前の事ですね。
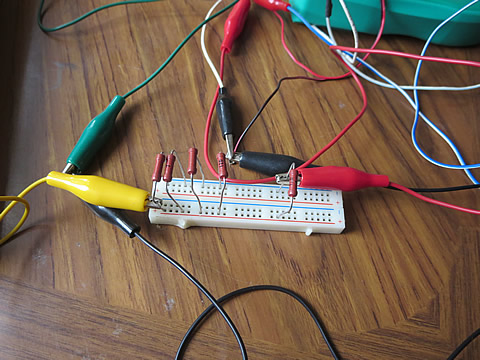
最初に、乾電池1個を使用してモータを回してみました。テーブルは問題なく回転し、その時のモータ端子間の電圧は1.19volt でした。次に、抵抗1本とモータを直列に配線して様子を見ましたが、モータは動きませんでした。電圧は 0.08volt でしたので、これではモータは回りませんね。12Ωの抵抗では大きすぎるのです。これ以上小さい抵抗は、0.02Ωのものしか無いので、この12Ωの抵抗を並列に並べて、より小さい抵抗を作りながら実験を進めました。 下の写真。
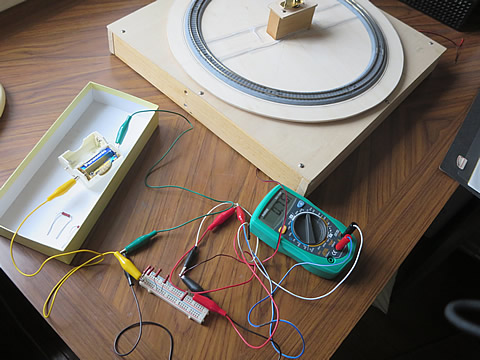
抵抗は、ブレッドボードの一部を使い、同じ抵抗を並列に差し込んで構成しました。
ターンテーブルには負荷をかけていない状態で回転させています。従って、モータにかかる負荷は、テーブルの駆動機構の回転摩擦抵抗のみとなります。
**** 追加実験 ******
報告書をまとめている時に、0Ω、すなわち乾電池で直に駆動した時の電圧のデータが欲しくなったので、追加の実験を実施しました。
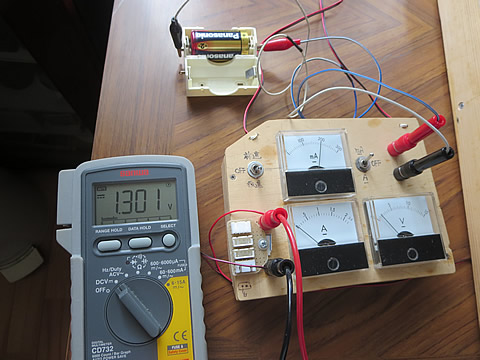
ついでに電流値も測定するために、例の簡易測定器を使用しました。
● 実験結果
実施した実験結果をまとめました。電源は単2乾電池1個です。
抵抗本数 |
合成抵抗 |
モータ端子電圧 |
抵抗端子電圧 |
電流(計算値) |
抵抗の消費電力(計算値) |
|||||
抵抗のみ |
モータ含 |
M停止 |
M回転 |
M停止 |
M回転 |
M停止 |
M回転 |
M停止 |
M回転 |
|
Ω |
volt |
volt |
mA |
W |
||||||
1 |
12.1 |
13.7 |
0.08 |
--- |
1.27 |
--- |
105 |
--- |
0.13 |
--- |
2 |
6.9 |
7.8 |
0.14 |
--- |
1.11 |
--- |
159 |
--- |
0.18 |
--- |
3 |
5.1 |
5.8 |
0.18 |
0.45 |
1.00 |
0.83 |
196 |
163 |
0.20 |
0.14 |
4 |
4.2 |
4.8 |
0.21 |
0.66 |
0.89 |
0.60 |
212 |
143 |
0.19 |
0.09 |
5 |
3.6 |
4.3 |
0.25 |
0.77 |
0.82 |
0.48 |
228 |
133 |
0.19 |
0.06 |
6 |
2.9 |
3.9 |
0.28 |
0.85 |
0.75 |
0.40 |
259 |
138 |
0.19 |
0.06 |
7 |
2.6 |
3.6 |
0.30 |
0.87 |
0.69 |
0.35 |
265 |
135 |
0.18 |
0.05 |
なし |
0 |
0.66 |
1.30 |
850 |
200 |
|||||
各抵抗を並列に連結した時の本数を元に、測定をしています。測定はそれぞれ個別に測定しており、同時測定ではありませんので、データ間のばらつきが生じているものと考えていますが、全体的な傾向を知りたいので、問題にはしておりません。また、クリップ線の抵抗も無視しています。
また、モータが回転できる条件の時に、あえてテーブルを手で押さえて回転を止めた(=モータの回転を止めた)状態でも測定を実施しています。
個々の抵抗の値は、11.8、11.9、12.0、12.0、12.1、12.1、12.1Ωでした。使用はランダムに使用しています。
●グラフで表示
データの数字だけを見ていても理解できないので、グラフにまとめました。まず、抵抗の本数を元にして、各特性をグラフ化しました。
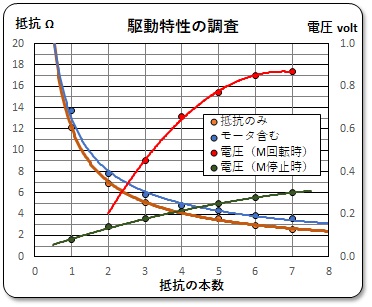
左のグラフは、合成抵抗値を示しています。そしてその時のモータ端子電圧も表示しました。これより、モータは2本と3本の間にて起動しています。抵抗でみると6Ω前後と推定できます。
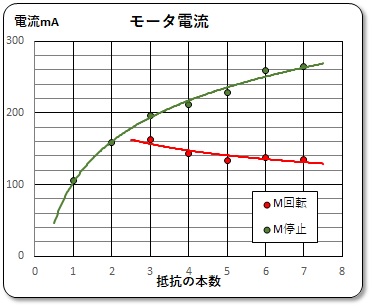
そして、この時の合成抵抗間の電圧降下量を測定してその時に流れている電流値を計算しました。その結果を上右のグラフに示します。モータが停止時は、モータの内部抵抗によるによって、電圧と電流は比例的に増加しますが、モータが回転を始めると、その逆起電力によって電流の流れが制限されます。約140mAで安定しています。
******************************************************
次に、個別特性について見ていきましょう。下左のグラフに、合成抵抗値とその時のモータ端子電圧を示します。これより、この機構のモータ制御には、0〜7Ωの間で制御すれば良いことが分かります。抵抗を下げていくとモータは回転を始めて、だんだん速度を速めてい行くことが分かります。回転数は計測していませんが、今までの経験より、電圧と回転数は比例するという事実をもとにして考察しています。 ノッチ制御も、このような抵抗になるように構成を工夫すれば良いことになります。
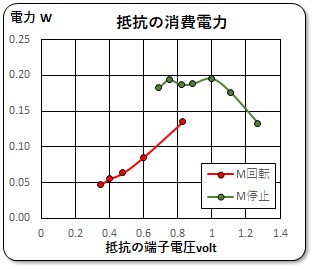
下中央のグラフは、この抵抗に電流が流れている場合の消費電力について計算したものです。この消費電力は熱として発生するので、その許容値を把握しておく必要があるのです。最大でも 0.2W と計算されましたが、1/4W の抵抗ではヤバいようです。このため、1W クラスの抵抗を使用する必要があります。
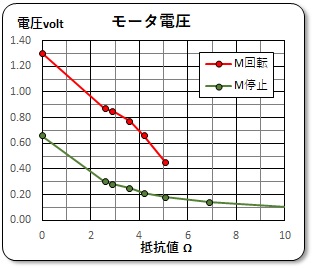
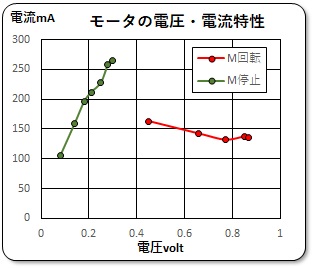
上右のグラフは、モータの電圧・電流特性を見ておきます。モータの電流値と負荷トルクは比例するので、モータ回転時の負荷トルク、すなわち駆動機構の回転負荷はほぼ一定値であることが推定できます。
■ ノッチ制御のための仕様を検討する
寄り道した実験の結果より、
- 制御用の抵抗は、0Ωから7Ωの範囲で可変であること、そして連続的である必要はない。
- 2Ωから6Ωの範囲は、細かい制御ができると良いであろう。
- 抵抗は、1W クラスの抵抗を使用すること。
と言うこと分かりました。また、抵抗での電力ロスが発生するとは言っても、乾電池1個で充分駆動させることができるので、PWM制御よりも合理的ではないかと考えてしまうのですが・・・・・・・・。 仕組みも簡単に出来そうですし!
*********************************************
次回は、その方法を検討することにします。
2023/8/26