
HOME >> 鉄道模型工作室 > 小型のターンテーブル式実験装置を作ろう またも壁が!
小型のターンテーブル式実験装置を作ろう またも壁が!
小型のターンテーブル式実験装置を工作していますが、またまた壁にぶつかってしまいました。先回のテスト結果より、一部改善を実施して、自信をもって本実験として取り組んだのですが・・・。
■ 改善の実施
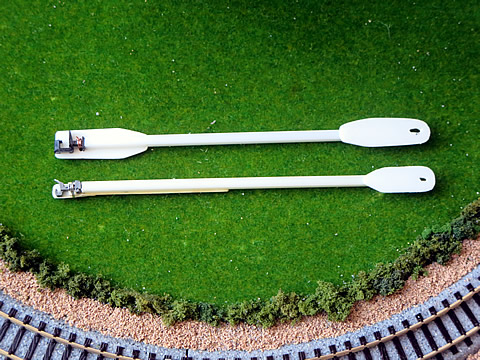
先回のテスト結果より、速度特性を測定中の無負荷状態をチェックするために、連結棒と拡大レバーとの間に大きなガタを設ける細工を実施しました。そして、アーノルドカプラー車にも連結出来るように新しく作りました。

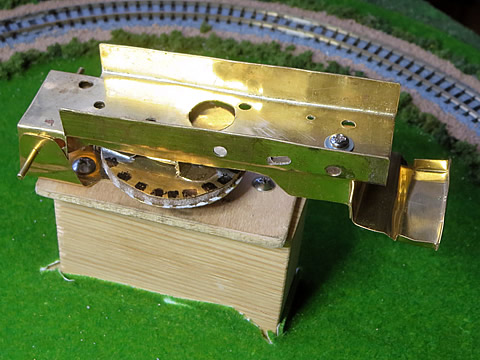
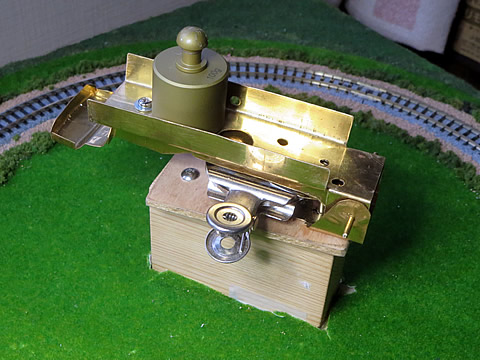
そして、ブレーキ部の重り搭載部はひ弱だったので補強しました。

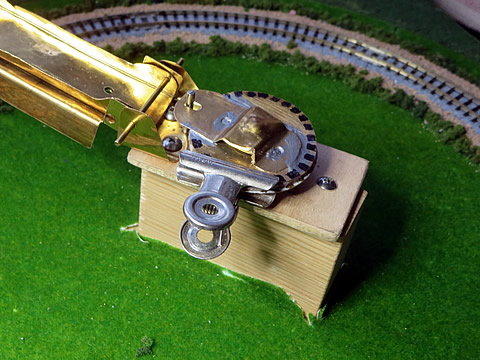
また、ブレーキ力の限界がどうかの疑問があったので、二つのブレーキ円盤をクリップで挟んで滑らないようにして測定できるようにしてみました。
これらの工夫を盛り込んで、自信をもって本実験として次の実験に取り組みました。
■ 岳南電車ED402号機の測定
先回と同じく、鉄コレの岳南電車ED402号機の測定を実施した結果を次にしめします。まず速度特性は、綺麗に測定する事が出来ました。
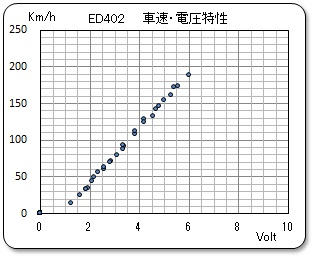
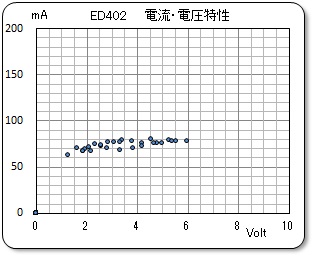
ブレーキ装置はクリップ状態にしてターンテーブルを駆動装置で回転させ、連結棒のガタ部を見ながらその回転を調整しました。いちいち調整するので面倒です。そして調整しきれずに2グラム以上あったデータは、データ整理段階においてグラフ表示をカットしています。従って上右端のデータはデータチェック用のためなので、測定結果としては意味をなしません。
************************************************************
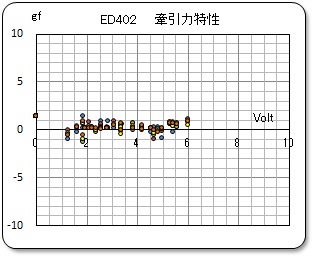
次に牽引力特性を測定しました。まず、結果から表示します。
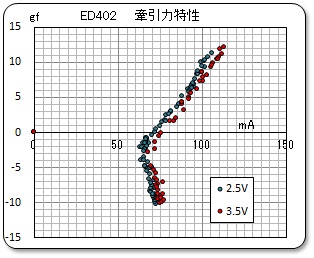
データ的には、問題なく綺麗に測定できています。データのバラツキは、速度なのか牽引力なのか、あるいは電流値なのかは判断できませんし、測定方法のバラツキなんか、あるいは小型車両が故の性能のふらつきなのかは分かりません。ホビーで実施しているので、この程度の精度は容認することとします。
■ 不満点とは
測定結果は、上記のように綺麗なデータが取得出来ているのですが、何が不満なのでしょうか?
1)ブレーキ装置は本当に必要なのか?
当初から考えていた速度特性測定時は、ターンテーブルを強制回転させて測定していますので、ブレーキ装置は不要となってしまいました。そこで、牽引力特性の測定時でも本当に必要なのか検証する必要があります。今回の実験時でもブレーキ部の設定をいろいろ変えて行ってみました。考え方は、「小型のターンテーブル式実験装置を作ろう 動力特性の測定方法」(2023/9/10)で述べたX測定法か、Y測定法かの課題なのです。
まず、ターンテーブルをモータで駆動させておき、重りによるブレーキ力を調整して駆動領域の測定を進めました。すると、10gfあたりで頭打ちとなりました。重りを重くしても変わりず、モータの回転数を絞っても同じ状態でした。そこで、モータを止めると車両はスリップ状態になりますが、測定が出来ません。
そうですよね、Arduino のロジックでは円盤のマーキング信号によって、測定のスタートとストップを実施しているので、円盤が止まっていると測定出来ないないのは当然です。別のスイッチを設けて別ロジックで測定するしかありませんね。
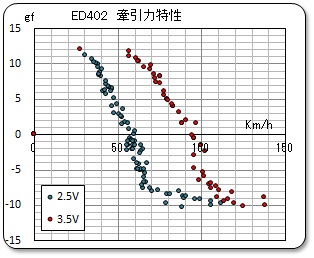
今度は制動側の測定を実施しました。制動領域の垂直部分は、テーブルの回転数をほぼ合わせて、重りを調整しながら測定を進めました。データが頭打ちなったころ合いで、回転数を上げるとグラフに示すように、スリップ領域でもデータが取得できました。この状態では、ブレーキ装置の2枚の円盤は密着状態であり、クリップで挟んでいる時と同じ状態となります。
すなわち、X測定法とY測定法は、両方共必要であると判断しました。
2)何故、駆動領域のスリップ状態が測定できないのだろうか?
上記のように、制度領域でのスリップ状態は綺麗に把握できるのですが、駆動領域で上手く行かないのはなんでだろうと言う疑問が湧いてきます。そこで、電圧設定を3.5volt に変更した時の測定時、回転するターンテーブルを少し指でさわって回転を邪魔した状態で測定しました。その時のプロット点が 30km/h 弱のデータです。回転数を落としてやれば測定できるのです・・・・・・・・!
でも、制御用のボリュームを目いっぱい絞っても、なぜ、回転数は落ちないのだろうか・・・・・・・・・。
スイッチを切るとテーブルは止まります。この差は何故なのか?今まで実施してきた傾斜式測定法でも、この領域の測定はほとんど不可能でしたので、諦めることも出来ますが、今回の目標の一つが、この領域での測定なのです。従って簡単にあきらめ事が出来ないのです。
では、どうすれば良いのだろうか、原因を推測しながら、いろいろ実施してみました。
■ 暗中模索の状態です
と言うわけで、まずは実行とばかりに測定台の裏側の駆動機構を眺めていました。
1)乾電池方式を変更する。
関係ないと思いつつ、単一乾電池の電圧を測ってみると、1.48ボルトしかありませんでした。新品を使っていたのですが、もうここまで低下していました。やはり無理があるようですので、ACアダプタ方式に変更することにしました。でも 3.3volt 仕様のものしか無かったので、試しに使ってみました。モータは 3volt 仕様ですので問題ないのですが、回転数が速くなってしまいました。 1.5volt から 3volt に変更したので当然ですね。
2)12Ωの抵抗を挿入する。
電流制限のために、1W 12Ωの抵抗を直列に挿入すると、今度は回転が出ませんでした。抵抗が大きすぎたのです。電気の素人のように無駄な事をやっているのですがこれらの作業中にヒントを掴みました。
モータで回転させている時に、テーブルの回転軸を手でつかむと回転が下がるのです。当然と言えば当然ですね。
*********************************************************
今回の減速機構は、モータから歯車に回転を伝える部分に、ウォームギヤを使用しています。このウォームギヤがあるために、出力軸からはモータを逆回転させる事が出来ないので、モータには出力軸側の影響を受けないと思い込んでいたのです。でも、出力軸の負荷が下がるとその分、モータの負荷が小さくなるのでその回転が上昇するのは当然です。
テーブルの回転数を落とすため、駆動用モータの電圧を下げました。でも、こんどは車両からの駆動力が駆動用モータの代わりにテーブルを回すことになるので、テーブルの回転数は落ちません。ブレーキ機構によって駆動モータ側に伝達しても、モータの回転を止めるブレーキとしては作用していないのです。出力軸が勝手に回転してくれるのでモータは負荷が低下して楽ちん回転を続けているのです。
DCモータは負荷に応じて回転数が変動する。この事実をすっかり忘れていたのです。すると、対策案のアイディアがいろいろ湧いてきました。
*********************************************************
でも、乾電池方式からACアダプタ方式への変更はもう工作済みですので、元に戻す事はしたくありません。そこで、1W 10Ωの可変抵抗器を直列にもうひとつ挿入することにしました。
3)スリップリング式集電機構の復活
テーブルの回転抵抗低減のために停止していたこの機構を復活することにしました。テーブルの回転を邪魔しようとする魂胆です。モータの駆動力が10グラム程度とすると、集電機構の回転抵抗が5グラム程度なので、あまり効果は期待出来ないようです。このターンテーブルの摩擦抵抗の増加は、Y測定法には有効であっても、X測定法には障害となるのです。しかし、測定車両への配線作業が無くなりますので、この方式を復活させることにしました。
4)減速機構のギヤ比を大きくしてモータへの影響を小さくする
これも、どれはどの効果があるのか不明ですが、部品が無いので新規購入と分解・再組付けが必要となります・・・・・。
5)昔のギヤードモーターを使う
大きな容量の昔使用したギヤードモーターを使うことを考えて、その部品をごそごそと探し出しました。「定置実験装置の製作」(2010/12/15)で使用したタミヤギヤードモータ 3633K75 で減速比 75 である。これだけの出力があれば、多少の負荷変動ももろともしないのではないかと考えたのです。制御回路もあるのですが、さてどうやって組み込もうかと思案のしどころです。どのような機構にするのか、対応する部品はあるのかと難問だらけです。
そこで、この時と同じようにタイヤを取り付けて円盤を直接駆動させる・・・・・・・・という手もあるのですが、グロテスクになりそうななので止めましょう。
6)ステップモータは使えないのか
負荷に応じて回転が変動するDCモータの代わりに、ステップモータはどうだろうか?脱調するまではトルクを維持できて、回転を制御できるのでこのようなニーズにはもってこいのはずです。でも回転はスムースに制御できるのか、仕様をどのように決めれば良いのだろうか、構造は?やはり課題もいっぱいあり、大仕事となりそうです。
7)モータを発電機として使う
モータを発電機として使うと抵抗となるので、回転数が落ちそうである。この場合はモータを出力側から駆動する必要があるので減速機構の逆効率が問題となってくる。このため、現在のウォームギヤ式の減速機構を変更する必要がある。やはり無理なのかな?
と言うことで、対策に行き詰まっています。
************************************************************
壁にぶつかって戸惑っていますが、駆動領域のスリップ状態は諦めて、他の車両の測定を実施することにします。
2023/10/7