
HOME >> 鉄道模型工作室 > モニタ式の操作盤を作ろう ポイント操作の確認
鉄道模型工作室 モニタ式の操作盤を作ろう ポイント操作の確認
ラズパイのWebIOPi アプリを使って卓上レイアウトを遠隔操作するプロジェクトを進めている。 今回は、ポイント駆動ユニットを接続し、卓上レイアウトにてテストを実施した。
■ まずは動画で紹介しよう
最初に完成状態を動画で紹介しましょう。 正常に作動している様子ですが、操作に慣れていないため、ウロウロの状態です。

■ ポイント駆動回路の追加
ハード回路に、ポイント駆動回路を追加した。 ポイント駆動回路のユニットは、「卓上レイアウトで楽しもう 自動運転 その7の4」(2019/12/5)で紹介したユニットで、今回は、12V仕様のユニットを使用しました。 5V仕様のユニットでは、DC5volt の電源が必要となるのですが、ラズパイの5V 出力の使用は、負担軽減のために避けることにしまいた。 もともと、モータドライバとコンデンサ式のポイント駆動回路には、12Vの電源が必要なので、この電源を活用します。
この駆動回路の信号入力は、トランジスタを使用して駆動させていますので、5Vではなくて、ラズパイ信号出力である 3.3volt でも駆動出来ると判断したのです。 ただし、ラズパイとポイント駆動回路のGNDラインは接続しておき、電圧レベルの基準点を同一にしておく配慮を行っています。
テスト走行として実施した時の回路を紹介します。
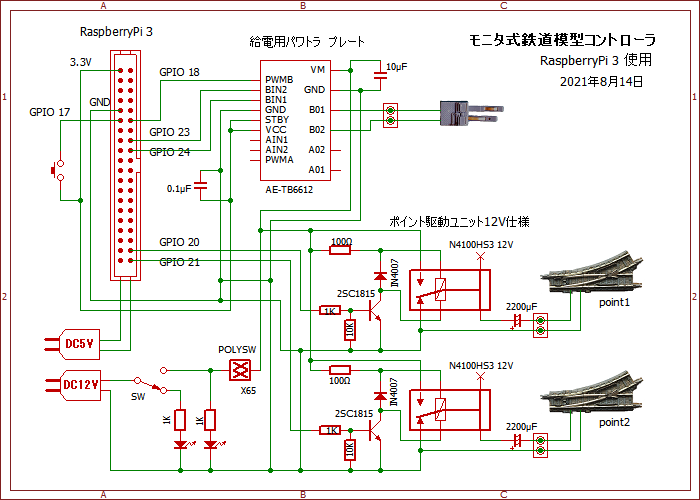
給電用パワトラは、2チャネルモータドライバ TB6612FNG を使って基板にセットした秋月のキット(AE-TB6612)を使用している。 出力側のターミナルブロックは使用せずにピンヘッドを使い、ブレッドボード上で使用出来るようにしています。 入力端子は、PWMB 端子を GPIO 18 に接続し、BIN2 と BIN1 を 23 と 24 に接続している。 メインの給電は 12volt である。 ポイント駆動ユニットの回路は今までのものをそのまま使用し、入力端子はGPIO 20 と GPIO 21 を使用した。
また、12volt 系は、ACアダプタを使用し、電流は 1.5A 仕様である。 そして大きなコンデンサの蓄放電が伴うので、安全のためにX65仕様のポリスイッチを挿入しているがその効果は分かりません。 また、この回路にON/OFFのプッシュボタンスイッチを追加しました。 丁度、ブレッドボードでも使用できるものがストックにありました。 このスイッチは、テスト走行中に遭遇したトラブル対策です。
操作がもたついている時、電車は停止ブロックに突き当たってガリガリしている状態で何度かありました。 あわてている時の操作が上手くいきません。 この様な時は電源を緊急停止にさせるべきですが、そのスイッチが無かったのです。 この時のスイッチは、12volt 系だけで充分なのです。 ラズパイ系まで停止させると、始めからやり直しになってしまって、逆に面倒なことになるのです。
そして、スイッチがどちらの状態かが分かるように、LEDを点灯させるようにしています。 また、GPIO 17 につながるプッシュボタンは、先回報告したラズパイのシャットダウンボタンです。
 .
.
■ ファイル構成
もう一度、今回のテストにおけるファイル構成を紹介しておきます。 ラズパイへのセットアップは、わが教則本である「RaspberryPiで学ぶ電子工作」 2017/2/1発行の第2刷を参考にし、サンプルファイルも指定のサイトからダウンロードして活用しています。
そして、ファイルを修正する度に、新しいフォルダを作り、その中に関係するファイル一式を収めています。 右のイラストを参照ください。
Webブラウザを使用するのでメインのファイルはHTMLファイルですが、ボタン操作などは JavaScript で記述します。 記述はHTML内でも可能ですが、別ファイルとして設定しています。 また、ラズパイ内で対応して稼動アイルはPython にて記述した script.py ファイルが受け持ちます。
この他に、スライダ機能を実現するために、サンプルファイルの記述をそのまま受け継いでいるので、関係する JQuery 関係のファイルもあります。 この内容はチンプンカンプンなので、そっくりそのまま活用させて頂いております。 この他に、変化するボタンのために作成した画像を同じフォルダ内に収めています。
スライダに関しては、マスコンをイメージした物を作りたいのですが、スライダの仕組みを理解していないため応用が出来ません。 ボタンの様に、クリックすると画像を変えるといった単純動作ではないからです。 操作棒の移動とその時の位置情報を読み取り、それをどうやって画像やGPIOに反映させるのかが分からないからです。 されに、水平スライダーを垂直スライダーに変更する方法もまだ分かっていないのです・・・・・・・・・・・!
この他に、シャットダウンボタン機能を実現するサンプルファイル 10-01-sw-poweroff.py もダウンロードして、指定の場所に保管し、必要な設定を実施しています。 これらは教則本に紹介されていますので、参照ください。
■ 卓上レイアウトでのテスト走行
これらの準備が整ったので、卓上レイアウトを変更して、テストを実施しました。 この時のレイアウトを下に示します。 一周するエンドレスレイアウトに、ポイントを使って二つの引込み線を設けた単純な構成です。 ポイントの定位は、直進状態としました。 この中で、ちょっとした細工として、ホームの入口にギャップを設けた事です。 ポイント1を反位にした場合には、ホームに停車中の列車を動かさないようにするためです。 このギャップが無いと、たとえポイントが反位になって給電が絶たれたとしても、外周路を回って来て反対方向から給電されてしまうので、列車は動き出してしまうからです。


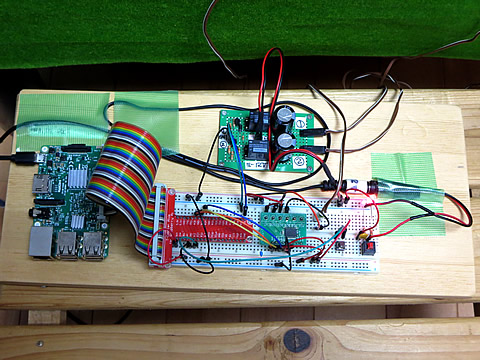
制御機器の部分を拡大してみましょう。 まな板のような板の上に機器類を固定しています。 下の写真。
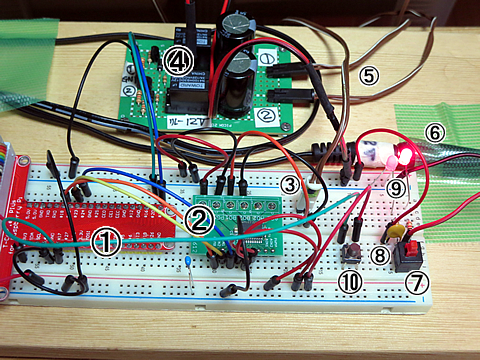
機器の配置を右の写真につけた番号で説明します。
- (1)は、ラズパイのGPIO端子と接続しているエクステンションボードです。
- (2)は、モータドライバです。 出力端子側には、(3)の給電フィーダーのコネクタと接続します。
- (4)は、ポイント駆動ユニットで、ポイントのコネクタ(5)を接続します。
- (6)は、12ボルトのACアダプタのコネクタで、ブレッドボードの奥側の給電ラインに接続させますが、(7)のプッシュ式トグルボタン、(8)のポリスイッチや(9)のLEFなどに接続します。
- (10)は、シャットダウンボタンです。
また、ご覧の様に、ラズパイにはモニタ、キーボード、そしてマウスも接続していません。 電源は二つのACアダプタを繋いでいるだけです。 遠隔操作はパソコンでもタブレットでも可能ですが、スマホが便利ですね。 そして、隠れた働き者が、無線通信用ルータです。
下の写真は、自分の作業場所となっている部屋ですが、卓上レイアウトとルータの位置が分かると思います。 右の写真がそのルータです。


テスト状況は巻頭で報告しました。 馴れない手つきでスマホをいじっていますが、電車のスピードに追い付いていないですな・・・・・・・・・!
*******************************************************************************
最初のねらいとは少しずれてしまいましたが、一応は活用できるシステムが出来たと言うことで、模型の操作を楽しむことにしましょう。
*******************************************************************************
わがハンドル名として使用している RTMRW (R君とT君とわたしM のRailWay ) に使わしてもらっている孫のR君が今日、大学から帰省するので、デモンストレーションをしようと考えいます。 彼の小さい頃の写真を「機械技術者の鉄道模型実験室」に載せています。 110頁です。 孫は大きくなって成長しましたが、わが鉄道模型は成長したのだろうか? 相変わらずの 下手の横好き で進歩がないようですな・・・・・・・・・・。
2021/8/16 作成