
HOME >> 鉄道模型実験室 > 新しいテープ式室内灯 チラツキパルスのトライ
鉄道模型実験室 No.234 新しいテープ式室内灯 チラツキパルスのトライ
先回、報告した新たな疑問、「電流値がどこまで落ち込むと、チラツキ現象として人の目に感じるのだろうか?」と言うに課題に対して、その実験方法を模索中ですが、今回は、使い慣れたArduinoを使った実験をトライしてみました。
■ 実験方法
アイディアは単純です。使い慣れたArduinoを使って矩形波信号を作り、その信号によってモータドライバの回路をON/OFFさせます。そして、それによってテープLEDを点滅させようとするものです。パルス波形は、0.5〜1.0 秒の間隔で発光を遮断させ、その遮断タイムをボリュームで調整するようにし、チラツキ時間の長短を作るのです。この電源電圧の遮断には、トランジスタ回路を組んでも良いのですが、すでに立派なモータドライバユニットを何個か持っているので、この部品を活用します。
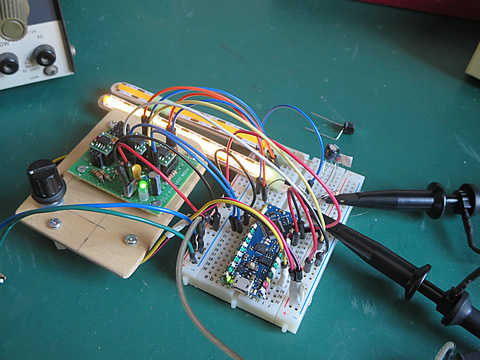
Arduino はブレッドボード上で使用でき Arduino Nano Every を使用しました。 また、モータドライバは、卓上レイアウト工作で作成したユニットを活用します。ここで使われているモータドライバICは、ローム製のフルブリッジドライバ 36V BD6231F です。そしてテープLED周りの回路をブレッドボード上に組んでテスト回路としました。
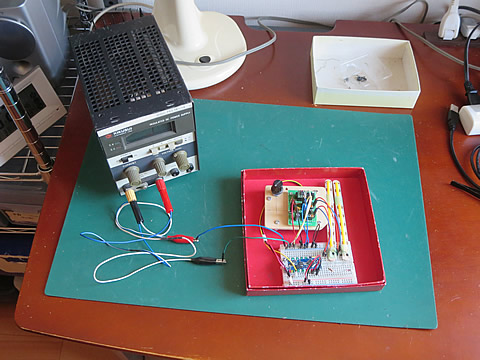
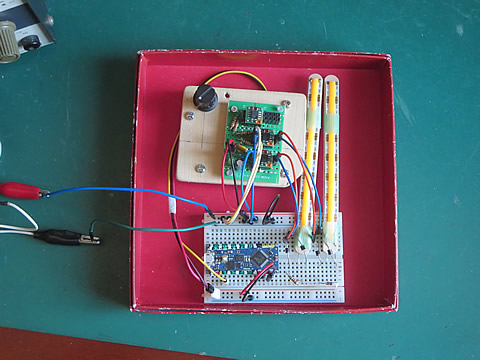
供給電源としては、電圧が調整できる安定化電源を使っており、テープLEDは新しいFCOBテープLEDです。


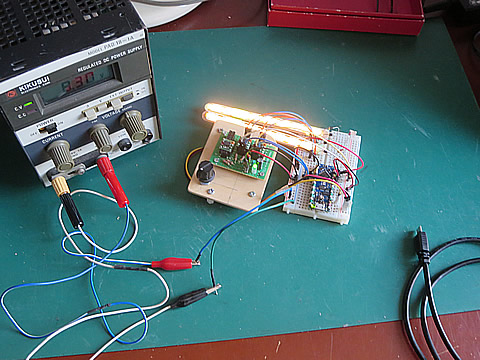
まず、テープLEDが点灯するかどうかをチェックしまいたが、何とか上記の様に点灯させることが出来ました。そこで、この点灯回路にパルス信号を与えてチラツキパルスの実験を開始しました。
■ チラツキパルスの実験トライ
Arduino に簡単なスケッチを書込み、この方法での実験できるのかを確認しました。
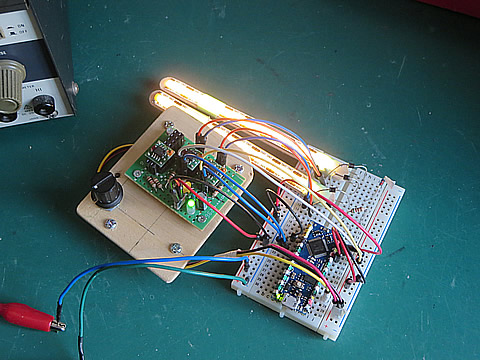
ボリュームを調整してチラツキ時間が可変である事が確認できました。その時の実験の様子を動画で紹介します。

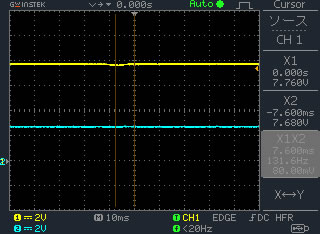
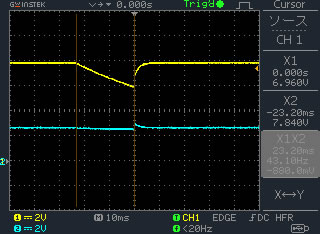
次に、オシロにて電圧変化を観察しました。電源の遮断時間が計測出来るのかの確認です。

いくつかのオシロ画面の様子を紹介します。


// Every-room-light-1
// 2024.3.3
#define VOL A0
#define ON 3
int vol;
void setup() {
pinMode(VOL,INPUT);
pinMode(ON,OUTPUT);
}
void loop() {
digitalWrite(ON,LOW);
delay(500);
vol=analogRead(VOL);
digitalWrite(ON,HIGH);
delay(vol);
}
**********************
// Every-room-light-2
// 2024.3.4
#define VOL A0
#define ON 3
int vol;
void setup() {
pinMode(VOL,INPUT);
pinMode(ON,OUTPUT);
}
void loop() {
digitalWrite(ON,HIGH);
delay(500);
vol=analogRead(VOL)/10;
digitalWrite(ON,LOW);
delay(vol);
}
■ 実験回路の内容
トライ実験により、実験装置の確認ができました。ただ、詳しい実験結果の報告は次回以降とし、ここでは実験回路やスケッチの内容を紹介します。
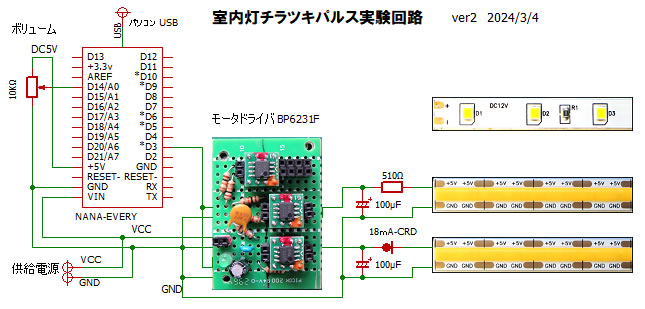
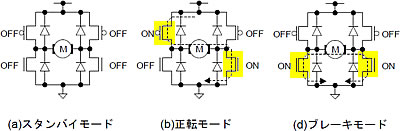
最初の回路(ver1)では、モータドライバのモータ部分をテープLEDの置き換えた回路とし、スケッチも右の中の上段のプログラムを使っていました。即ち、点灯時は正転モードで、遮断時はブレーキモードにしていました。
すると、LEDは消灯するも、コンデンサに溜まった電気がGNDに逃げてしまうという失敗をやらかしました。これではコンデンサの効果が確認できません。このため、ショットキーバリアダイオードを使って逆流防止としました。
 .
.
その他にも問題がありましたが何とか目的のデータが得られるようになったのですが、お風呂の中でいろいろ反省しながら考えていると、無駄な回路であることに気が付きました。
ブレーキモードで回路をオープンにするのでは無く、スタンバイモードで回路を切断すれば良い事に気が付きました。でも、ドライバには逆向きのダイオードがあるので、上流側に逆流する心配があったのですが、ここには常に高圧が掛かっているので逆流の問題はないと判断しました。
また、LEDからの戻りは、ドライバを通さずに直接GNDに接続することも回路を単純化することが出来ました。こうして仕上がったのが、上記の回路(ver2)で、スケッチも下段の内容になりました。点灯時と消灯時の指令が逆になっています。
また、ボリュームの調整範囲を、0〜100 msec 程度のなるように変更しています。なお、モータドライバユニットの回路図も参考として左に記載しておきます。
*****************************************
さて次回は、実験結果を報告しよう。
2024/3/5