
HOME >> 鉄道模型自動運転システム > 自動列車停止装置 ATS のシステム要件
自動列車停止装置 ATS のシステム要件
■ はじめに
物置部屋に設置された我がレイアウトに、無謀にも追突防止の自動列車停止装置、いわゆるATSを設置しようと挑戦を始めた。 最初に、システムの要となる通過センサーの工作から始めたが、マイクロスイッチを使用した簡易形のセンサーは見事に失敗してしまった。
そこで、光センサーを使用した通過センサーを工作してテスト走行を実施した結果、このセンサーは活用できることが分かったが、光センサー使用すると言う事は、何らかの電気/電子システムを作ると言うことに他ならないので、処理回路やリレー回路など、機械屋の小生にとっては難題が待ち受けているものと覚悟をきめている。 しかし、システムを考えると言う事は嫌いではないので、楽しんで挑戦する事にした。
ところが、このセンサーを使用してテスト走行を実施していた時に、システムを成立させるための条件や、あるいは制約事項が多々あることに気が付いた。 レイアウトの工事を始める前に、このシステムを成立させる要件を検討して置く必要性を感じたので、今回は、そのシステムを構築するにあたり、システムに要求される要件をまとめる事にした。 大がかりな工作が予想されるので、工作後のシマッタ!では取り返しが付かない事になるからである。
なお、触ったことがないDCC システムについては、一切考慮していいませんので、あしからず。
■ 鉄道模型のNゲージに於けるATSシステムのむつかしさ
システム要件を考えている中で、鉄道模型のNゲージ特有の問題を再確認し、ATSシステムに於ける難しさに気が付いた。 実際の鉄道では、絶対に起こしてはいけない追突を、ほぼ100%完全に防止出来るシステムが採用されているが、Nゲージでは、それを実現させるのは難しいと思うようになった。 そこで、完全主義を捨てて、ホビーとして適当に楽しめる程度の完成度にすることする。
問題点を挙げてみよう。 まず、車両の存在を検知する方法の違いがある。 実際の鉄道の場合には、左右のレールの通電具合で車両の存在を検知していると聞いている。 これによって、電車や客車、あるいは貨車であろうとも、車輪ひとつでもレールの上にあれば、それを検知できる。 そして、ある区間を区切った検知区間のどこに居ても検知が可能なのである。 翻ってNゲージの場合は、左右の線路を使って給電しているので、このような訳には行かない。 左右の車輪はあえて絶縁されており、車輪がレールの上にあっても検知出来ないのである。 動力車や室内灯などを設置した車両では、僅かな電流を検知するセンサーを使用すれば反応可能ではあるが、取り扱える車両が限定されてしまう。
また、今回工作した車両通過センサーの場合は、センサーを設置した場所でしか車両の存在を検知できないのである。 実際の鉄道のように検知区間のどこに居ても検知が可能である事とは異なり、あるポイントでしか検知出来ないのである。 これはシステムを構築する上では決定的な違いとなり、検出部分が、いわゆる、“線” と “点” の違いであると考えている。 “点” では “線” のように全区間での検知が出来ないである。
また、給電と動力車の制御方法の違いも認識する必要がある。 Nゲージの場合は給電する電圧を制御して車両の運転を制御しているため、給電をストップさせれば車両は停止してしまう。 当たり前だと思われるが設計上の注意が必要なのである。 センサーによって自分自身の存在を検知し、それによって閉塞区間の給電をストップしてしまう様なうっかりした設計をすると、永久に停止した状態のデッドロックに突入してしまうのである。
この他にも問題点はあると思われるが、上に述べたように完全主義を捨てて、ホビーとして適当に楽しめる程度の完成度にすることにしよう。
■ 前提条件の設定
センサの位置や閉塞区間の長さなどをレイアウト上で構成する場合のシステム要件として、固定している通過センサー(“点” 方式のセンサー)を使用したATSシステムでの必要条件や設定事項を書き出しておこう。
- 【 要件1 】 閉塞区間の長さ
- ひとつの閉塞区間の長さは、走行させる列車の最大長さ以上に設定すること。 これは、通電カプラーを装着したモデルがあるため、閉塞区間内で確実に停車させるために、その車両長さ以上の長さに設定しておく必要がある。
- 【 要件2】 通過センサーの位置
- 通過センサーの位置から閉塞区間までの距離は、走行させる列車の最大長さ以上に設定すること。 これは、列車の動力車の位置にもよるが、自分自身の存在を検知した通過センサーによって、自分自身が停止しないようにするためである。 最後尾の動力車の例は殆どないので、ある程度の長さでもよいが、自分自身の室内灯や尾灯を消さないためにも列車の最大長さ以上に設定することが望ましい。
- 【 要件3】 動力車の位置
- 列車を停止させる場合には、その列車編成の動力車の位置を考えておく必要がある。 このため、機関車による牽引列車だけでなく、列車の中央部に動力車を置いた編成であっても対応できること。 この要件は本当に必要かどうかは不明であるが、検討事項として頭に入れておけとの意味合いである。
- 【 要件4】 通過センサーの検知
- 通過センサーは先頭車両だけでなく列車全体を検知すること。 これは速度計のように先頭車両の通過のみを検出するセンサーと異なり、最後尾の車両が通過し終わるまで連続してセンシングすることを要求するものである。 前の車両が確実に通過し終わってから、閉塞区間を解放するようにするためである。
■ 関係式をさぐる
上記のシステム要件を念頭において、各項目の関係を理解するため、式を立てて考察することにする。
まず、下のイラストを参照してください。 このイラストは、先行する列車1を後から追いかけてくる列車2が追突しない限界の状態をイラストにしたものである。 右半分が閉塞区間で停止していた列車2が、列車1の通過完了を受けて閉塞を解かれ、スタートする瞬間の位置関係を示し、左半分は、ある時間後に追いついて来た列車2を、次の閉塞区間で停止させるためのぎりぎりの状態を示したものである。 これ以上列車2が早ければ、閉塞区間が閉塞されても列車2の動力車は前の通電区間に入ってしまうので、停車させる事は出来ない状態となる。 この時の列車1と2の速度V1とV2の関係を求めれば、各項目の関係が理解できるようになると考えた。
 .
.
右から左の状態までの走行距離は、
![]()
![]()
である。 この時の走行時間は同じなので、
![]()
となり。 この関係式から列車1と列車2の速度比を求めると、
![]()
となる。 一般的には、センサー位置を統一したいので、Ls1とLs2はほぼ同じ様な値を設定するだろうと仮定すると、Ls1 = Ls2 となるので、
![]()
となる。 あれー? センサーの位置は消えてしまうので関係無いのかな? と思ってしまうが、 V2/V1 の関係には関与しないものの、要件2)の様に、自分自身をデッドロックしないようにするため、ゼロとは行かにだろう。 また、Ls1 = Ls2 = Lo とすると、閉塞区間が連続している状態を示すことになる。
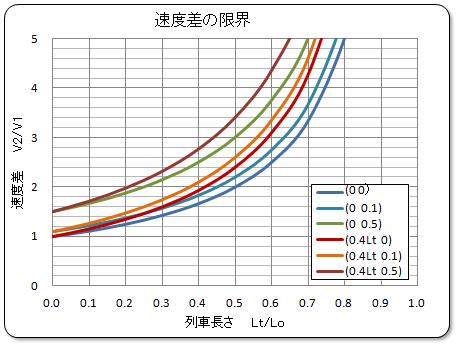
この V2/V1 の関係を区間間隔 Lo を基準にしてグラフ化したものを右上に示す。 パラメータとして表記している ( a b ) の値は、a = Lm/Lt で動力車の位置を、 b = Lf/Lo で停止位置を示している。 ここで、列車1と列車2の車両長さは同じと仮定している。 そして、このライン以上の速度比をもった列車では、後続列車を停車させる事が出来ないので、追突してしまう事を意味している。
このグラフから、各項目の関係を読み取ろう。 V2/V1の速度比が大きいことは、速度の違う車両でもこのATSシステムに適応できる事を示しているので、出来るだけ大きくなる条件を見つけようとするものである。
- 1)列車1の長さ Lt
- 先行する列車1の長さ Lt について考察してみよう。 列車1の最後尾で列車2のスタートを制御し、先頭車で次の閉塞区間を制御するため、列車は長い方が有利である。 機関車単機で走行する場合などは、列車の長さが短いため、次の通過センサーにたどり着くまでに時間が掛り、列車2が閉塞区間を通り過ぎてしまうのである。 区間間隔 Loを小さく設定すれば良いが、区間数が増大して工作が大変になりそうだし、要件2)のデッドロックもあるので、列車長さLt と区間間隔 Lo のジレンマに陥るであろう。
- 2)動力車の位置 Lm
- 動力車の位置 Lm については、列車1と列車2の車両長さを同じと仮定しているものの、動力車の位置が後ろにある方が有利であることが判る。 当然か!
しかし、機関車による牽引列車もどんどん走らせたいので、この条件は活用しないことにしよう。 - 3)停止位置 Lf
- 停止位置 Lf を大きくする方法も有利であるが、この制御には何らかの追加のセンサーが必要となってしまう。 しかし、将来はATSシステムと信号機も連動させたいとも考えているので、閉塞区間の先頭部分で列車を停車させてみたいと考えている。 このためには、閉塞区間の先頭部分にもセンサーを配置して、先行区間にあるセンサーとのANDを使って列車を止めようとするものである。 この方式を採用すると、Lf = 0 となってしまい、不利な状態になるのであるが、閉塞区間での停車位置が一定するので採用してみたい案件である。
■ まとめ
先回の光センサーを使った走行テストで混乱してしまった頭を整理する事が出来た。 走行させる列車の長さ、動力車の位置、停止位置、区間間隔などと速度比の関係を知ることが出来たので、この関係を頭に入れて、我が物置レイアウトに設置可能なATSシステムを構想することにしよう。