
HOME >> 鉄道模型 自動運転システム目次 その1 その2 再編集版
卓上レイアウトで楽しもう その6
- ■ 自動運転 その33-3 ( 2021/4/8)
 この「その33」シリーズもいろいろ工作してきましたが、システムとして仕上がったので、手持ちの色々な車両を走らせてみることにしましょう。 第2弾です。
この「その33」シリーズもいろいろ工作してきましたが、システムとして仕上がったので、手持ちの色々な車両を走らせてみることにしましょう。 第2弾です。- ■ 自動運転 その33-2 ( 2021/4/7)
 この「その33」シリーズもシステムとして仕上がったので、手持ちの色々な車両を走らせてみることにしましょう。
この「その33」シリーズもシステムとして仕上がったので、手持ちの色々な車両を走らせてみることにしましょう。 - ■ 自動運転 その33-1 ( 2021/3/19)
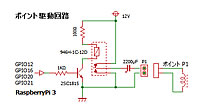
 先回は、制御箱内のゴチャゴチャの配線を改良すべく工作を実施した。 そして、ホームでの追い越しが出来るように設定したのに、その様子を紹介していませんでした。今回は、いつもの様に配線図とスケッチ、および走行状態を紹介します。
先回は、制御箱内のゴチャゴチャの配線を改良すべく工作を実施した。 そして、ホームでの追い越しが出来るように設定したのに、その様子を紹介していませんでした。今回は、いつもの様に配線図とスケッチ、および走行状態を紹介します。 - ■ 自動運転 その33 ( 2021/3/14)
 先回のレイアウト「卓上レイアウトで楽しもう その32」(2021/3/5)のレイアウトを変形させ、ホームでの追い越しが出来るようにして走らせることにした。
先回のレイアウト「卓上レイアウトで楽しもう その32」(2021/3/5)のレイアウトを変形させ、ホームでの追い越しが出来るようにして走らせることにした。- ■ 自動運転 その32 ( 2021/3/5)
 バンダイ製の台車に集電配線を行いし、室内灯装着の工作を実施した。 その走行状態を動画にて紹介する。 しかし、走らせ見るとトラブル続きであった。 集電化工作が原因であるが、改善も限界があるのでレイアウト変更で対応した。
バンダイ製の台車に集電配線を行いし、室内灯装着の工作を実施した。 その走行状態を動画にて紹介する。 しかし、走らせ見るとトラブル続きであった。 集電化工作が原因であるが、改善も限界があるのでレイアウト変更で対応した。- ■ 自動運転 その31 ( 2021/2/5)
 I/Oポートの不足の解決策として、Arduino MEGA を使用する方法について調査を実施し問題なく使用出来る事が確認出来たので、早速レイアウトの自動運転に活用した。
I/Oポートの不足の解決策として、Arduino MEGA を使用する方法について調査を実施し問題なく使用出来る事が確認出来たので、早速レイアウトの自動運転に活用した。- ■ 自動運転 その30-1 ( 2021/1/26)
 先回の続きとして、リーバース走行を含む運転モード3と4について検討を実施した。今回はその応用として、1番と2番ホームに列車が停車している場合を主に紹介しよう。
先回の続きとして、リーバース走行を含む運転モード3と4について検討を実施した。今回はその応用として、1番と2番ホームに列車が停車している場合を主に紹介しよう。- ■ 自動運転 その30 ( 2021/1/23)
 「スケッチの構成に関する一考察」で少し紹介した新しいレイアウトでの自動運転の作業を進めています。 そして、やっとのことでテスト走行までたどり着きましたので、その様子を紹介します。
「スケッチの構成に関する一考察」で少し紹介した新しいレイアウトでの自動運転の作業を進めています。 そして、やっとのことでテスト走行までたどり着きましたので、その様子を紹介します。- ■ 自動運転 その29 ( 2021/1/6)
 先回では、苦労して装着したBトレの室内灯を楽しむことと、クリスマスツリーを囲むループ線をめぐるレイアウトがテーマでしたが、やっぱり単純な仕掛けでしたので、少し変化をつけることにしました。
先回では、苦労して装着したBトレの室内灯を楽しむことと、クリスマスツリーを囲むループ線をめぐるレイアウトがテーマでしたが、やっぱり単純な仕掛けでしたので、少し変化をつけることにしました。
卓上レイアウトで楽しもう その5
- ■ 自動運転 その28 ( 2020/12/22)
 卓上レイアウト・シリーズの新しいパターンもそろそろネタ切れです。 今回は、苦労して装着したBトレの室内灯を楽しむことと、クリスマスツリーを囲むループ線をめぐるレイアウトとし、クリスマス飾りとすることにします。
卓上レイアウト・シリーズの新しいパターンもそろそろネタ切れです。 今回は、苦労して装着したBトレの室内灯を楽しむことと、クリスマスツリーを囲むループ線をめぐるレイアウトとし、クリスマス飾りとすることにします。- ■ 自動運転 その27-1 ( 2020/11/28)
 卓上レイアウト・シリーズの新しいパターンとして、先回から少し変形させた新しいパターンを組み立てた。 今回のポイントは卓上用クリスマスツリーを囲むループ線を設けた事である。
卓上レイアウト・シリーズの新しいパターンとして、先回から少し変形させた新しいパターンを組み立てた。 今回のポイントは卓上用クリスマスツリーを囲むループ線を設けた事である。- ■ 自動運転 その26−4 クリスマス飾り ( 2020/11/25)
 卓上レイアウトシリーズのパターン12もやっと完成することができたので、目的としたクリスマス飾りを置いてみた。
卓上レイアウトシリーズのパターン12もやっと完成することができたので、目的としたクリスマス飾りを置いてみた。- ■ 自動運転 その26−3 機関車牽引列車 ( 2020/11/17)
 先回は運行が完了した列車と、ヤードに停留させていた列車とを交代させて、交代した列車を周回運行させるという自動運転のパターンを検討した。 今回はこのパターンにて機関車で牽引された旅客列車を走らせた。
先回は運行が完了した列車と、ヤードに停留させていた列車とを交代させて、交代した列車を周回運行させるという自動運転のパターンを検討した。 今回はこのパターンにて機関車で牽引された旅客列車を走らせた。- ■ 自動運転 その26−2 交代パターン ( 2020/11/16)
 運行が完了した電車と、ヤードに停留させていた電車とを交代させて、交代した電車を周回運行させるという自動運転のパターンを検討した。
運行が完了した電車と、ヤードに停留させていた電車とを交代させて、交代した電車を周回運行させるという自動運転のパターンを検討した。- ■ 自動運転 その26−1 周回パターン ( 2020/11/12)
 今年も暮れが迫って来た。 クリスマスシーズンが近づいてきたので部屋の飾りを兼ねて卓上レイアウトを再開した。今回は、基本運転としての周回パターンについて自動運転を検討した。
今年も暮れが迫って来た。 クリスマスシーズンが近づいてきたので部屋の飾りを兼ねて卓上レイアウトを再開した。今回は、基本運転としての周回パターンについて自動運転を検討した。- ■ 自動運転 その26 再開する ( 2020/11/7)
 今年も暮れが迫って来た。 クリスマスシーズンが近づいてきたので部屋の飾りを兼ねて卓上レイアウトを再開した。
今年も暮れが迫って来た。 クリスマスシーズンが近づいてきたので部屋の飾りを兼ねて卓上レイアウトを再開した。- ■ 自動運転 その25 ( 2020/4/25)
 先回、ビデオ解析として報告したレイアウトについて、後追いであるがハードに関する部分を紹介しておこう。
先回、ビデオ解析として報告したレイアウトについて、後追いであるがハードに関する部分を紹介しておこう。
卓上レイアウトで楽しもう その4
- ■ ビデオ撮影を使った解析 No.2 ( 2020/4/23)
 いま四苦八苦しているシステムがあります。 その解決のために、ビデオを使って不具合対策の第2弾を報告します。
いま四苦八苦しているシステムがあります。 その解決のために、ビデオを使って不具合対策の第2弾を報告します。- ■ ビデオ撮影を使った解析 No.1 ( 2020/4/18)
 いま四苦八苦しているシステムがあります。 その解決のために、ビデオを使って不具合対策を実施しているのです。 まずはその様子を紹介しましょう。
いま四苦八苦しているシステムがあります。 その解決のために、ビデオを使って不具合対策を実施しているのです。 まずはその様子を紹介しましょう。- ■ 自動運転 その6−1 ( 2020/4/8)
 最新のユニットを使って、今までのシステム構成を見直して行きます。 今回は、「自動運転 その6」(2019/11/24)の構成を変更しました。
最新のユニットを使って、今までのシステム構成を見直して行きます。 今回は、「自動運転 その6」(2019/11/24)の構成を変更しました。- ■ 自動運転 その5−1 ( 2020/3/28)
 最新のユニットを使って、今までのシステム構成を見直して行きますが、まず手始めに「自動運転 その5」(2019/11/18)のユニット構成を変更しました。
最新のユニットを使って、今までのシステム構成を見直して行きますが、まず手始めに「自動運転 その5」(2019/11/18)のユニット構成を変更しました。- ■ 自動運転の制御手段 ( 2020/3/28)
 卓上レイアウトを楽しもうと銘打って、自動運転システムを工作してきましたが、ここで立ち止まって今までの工作内容を振り返ることにしました。 今回は、まだ課題が残っている自動運転の制御手段について考えてみることにします。
卓上レイアウトを楽しもうと銘打って、自動運転システムを工作してきましたが、ここで立ち止まって今までの工作内容を振り返ることにしました。 今回は、まだ課題が残っている自動運転の制御手段について考えてみることにします。- ■ 各ユニットの見直し ( 2020/3/25)
 卓上レイアウトを楽しもうと銘打って、自動運転システムを工作してきましたが、ここで立ち止まって今までの工作内容を振り返ることにしました。 先回の電気系回路構成の見直しに引き続き、各制御ユニットの回路についても修正を実施しました。
卓上レイアウトを楽しもうと銘打って、自動運転システムを工作してきましたが、ここで立ち止まって今までの工作内容を振り返ることにしました。 先回の電気系回路構成の見直しに引き続き、各制御ユニットの回路についても修正を実施しました。- ■ 電気系回路構成の見直し ( 2020/3/24)
 卓上レイアウトを楽しもうと銘打って、自動運転システムを工作してきましたが、ここで立ち止まって今までの工作内容を振り返ることにしました。 先回の報告内容に従って電気系回路構成の見直しを実施しました。
卓上レイアウトを楽しもうと銘打って、自動運転システムを工作してきましたが、ここで立ち止まって今までの工作内容を振り返ることにしました。 先回の報告内容に従って電気系回路構成の見直しを実施しました。- ■ 見直しを実施する ( 2020/3/22)
 卓上レイアウトを楽しもうと銘打って、自動運転システムを工作してきましたが、ここで立ち止まって今までの工作内容を振り返ることにしました。 いつも愛読させてもらっています「Nゲージレイアウト国鉄露太本線建設記」さんのアドバイスをもとにシステムを見直すことにしました。
卓上レイアウトを楽しもうと銘打って、自動運転システムを工作してきましたが、ここで立ち止まって今までの工作内容を振り返ることにしました。 いつも愛読させてもらっています「Nゲージレイアウト国鉄露太本線建設記」さんのアドバイスをもとにシステムを見直すことにしました。- ■ 自動運転 その24 3重円形路での半自動運転 ( 2020/3/14)
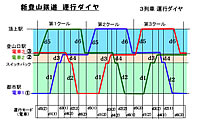
 ポイント操作を手動操作にした半自動運転としました。 レイアウトはシンプルな3重の円形レイアウトにし、中央部に対向型のホームのある駅としています。入線や出発は手動操作のポイントに従い、ホーム内での減速停車と、発進加速を自動運転としました。
ポイント操作を手動操作にした半自動運転としました。 レイアウトはシンプルな3重の円形レイアウトにし、中央部に対向型のホームのある駅としています。入線や出発は手動操作のポイントに従い、ホーム内での減速停車と、発進加速を自動運転としました。
卓上レイアウトで楽しもう その3
- ■ 自動運転 その23 十字路の交互運転 ( 2020/3/1)
 クローバー路線での自動運転について、やっと満足できるレベルまで持つ込むことが出来ました。 そこで、最初から予定していた2列車の同時運転に挑戦しました。 注目点は十字路の交互運転です。
クローバー路線での自動運転について、やっと満足できるレベルまで持つ込むことが出来ました。 そこで、最初から予定していた2列車の同時運転に挑戦しました。 注目点は十字路の交互運転です。- ■ 自動運転 その22 ( 2020/2/26)
 先回の「卓上レイアウトで楽しもう 自動運転 その21」で、モータドライバを壊してしまいました。 その後、代わりのドライバが準備と調査が出来ましたので、自動運転の実験を再開しました。
先回の「卓上レイアウトで楽しもう 自動運転 その21」で、モータドライバを壊してしまいました。 その後、代わりのドライバが準備と調査が出来ましたので、自動運転の実験を再開しました。- ■ 自動運転 その21 ( 2020/2/19)
 レイアウトをまたまた変更しました。中央部のクロスを中心とした四葉のクローバーの形のレイアウトです。 この交差点を中心として、周辺部をグルグルと巡回させる走行パターンを考えています。
レイアウトをまたまた変更しました。中央部のクロスを中心とした四葉のクローバーの形のレイアウトです。 この交差点を中心として、周辺部をグルグルと巡回させる走行パターンを考えています。- ■ 自動運転 その20 ( 2020/2/11)
 卓上レイアウトの自動運転において、いよいよ Arduino Nano Every を使って制御を実施しました。 先回のイライラはどこ吹く風ですんなりと作動するようになりました。
卓上レイアウトの自動運転において、いよいよ Arduino Nano Every を使って制御を実施しました。 先回のイライラはどこ吹く風ですんなりと作動するようになりました。- ■ 自動運転 その19 ( 2020/2/10)
 システムの簡素化対策の一環として、制御マイコンを取り扱いが容易な Arduino Nano Every を使ってみることにする。 でも、今回も使いこなすまでには、ウロウロしてしまった。 原因は単純でしたが・・・・・・・・・!
システムの簡素化対策の一環として、制御マイコンを取り扱いが容易な Arduino Nano Every を使ってみることにする。 でも、今回も使いこなすまでには、ウロウロしてしまった。 原因は単純でしたが・・・・・・・・・!- ■ 自動運転 その18( 2020/2/6)
 システムの簡素化対策の一環として、信号機用制御マイコンを独立させる工作の第2弾として、スラブレール用センサのジャンク品を活用して信号機に仕立てることにしました。
システムの簡素化対策の一環として、信号機用制御マイコンを独立させる工作の第2弾として、スラブレール用センサのジャンク品を活用して信号機に仕立てることにしました。- ■ 自動運転 その17( 2020/2/5)
 今回は、システムの簡素化対策の一環として、信号機用制御マイコンを独立させる工作を実施しました。
今回は、システムの簡素化対策の一環として、信号機用制御マイコンを独立させる工作を実施しました。 - ■ 自動運転 その16 ( 2020/2/1)
- 今回は、その15で実施したシステムを少し簡素化しようと考え、その方策として一列車運行モードを実験しましたので報告します。
- ■ 自動運転 その15 ( 2020/1/28)
 自動運転その14にて紹介したレイアウトに、信号機を組込みました。 そして通過センサの機能も組み込むことにしました。 でも、今回もプログラム部分で、四苦八苦したうえでやっと順調に作動させることが出来ました。
自動運転その14にて紹介したレイアウトに、信号機を組込みました。 そして通過センサの機能も組み込むことにしました。 でも、今回もプログラム部分で、四苦八苦したうえでやっと順調に作動させることが出来ました。
卓上レイアウトで楽しもう その2
- ■ 自動運転 その14 ( 2020/1/20)
 自動運転その13にて紹介したレイアウトに、予定していたリバース運転を組込むことにしましょう。 でも、あちこちでつまずき、四苦八苦したうえでやっと順調に作動させることが出来ました。
自動運転その13にて紹介したレイアウトに、予定していたリバース運転を組込むことにしましょう。 でも、あちこちでつまずき、四苦八苦したうえでやっと順調に作動させることが出来ました。- ■ 自動運転 その13-2 ( 2020/1/9)
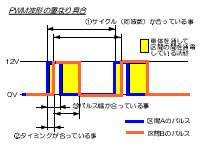
 今回のレイアウトは、外側と内側の周回路に、リバースサークルを追加したものです。その自動運転の仕掛けを紹介しましょう。また、PWM制御方式のパワーユニットが使えない事も分かりました。その原因はモータドライバにありました。
今回のレイアウトは、外側と内側の周回路に、リバースサークルを追加したものです。その自動運転の仕掛けを紹介しましょう。また、PWM制御方式のパワーユニットが使えない事も分かりました。その原因はモータドライバにありました。- ■ 自動運転 その13-1 ( 2020/1/8)
 すでに、松の内も明けてしまいましたが、ともかく 新年あけましておめでとうございます。昨年の暮れは、トラブル対策が完了できないままに、時間切れとなってしましました。Bトレが駄目なら、トーマス・ランドにしようと目論んで、新しいレイアウトに変更しました。
すでに、松の内も明けてしまいましたが、ともかく 新年あけましておめでとうございます。昨年の暮れは、トラブル対策が完了できないままに、時間切れとなってしましました。Bトレが駄目なら、トーマス・ランドにしようと目論んで、新しいレイアウトに変更しました。- ■ 自動運転 その12 ( 2019/12/31)
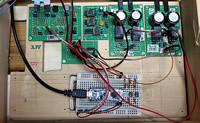
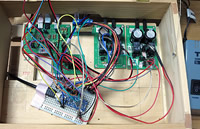
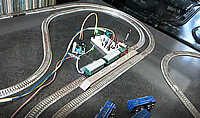
 今回の内容は、レイアウトを少し修正してスッキリとさせる事と、制御機器を箱の中に収めて見栄えが良くなるように工作しました。
今回の内容は、レイアウトを少し修正してスッキリとさせる事と、制御機器を箱の中に収めて見栄えが良くなるように工作しました。- ■ 自動運転 その11 ( 2019/12/22)
 反対側のホームに制御を追加し、さらももうひと列車を入線させて、合計3列車を同時運転させようとの試みの続きです。 今回は、他方のホームに停車している列車がある場合は、そちらの列車も同時に出発させようとするものです。
反対側のホームに制御を追加し、さらももうひと列車を入線させて、合計3列車を同時運転させようとの試みの続きです。 今回は、他方のホームに停車している列車がある場合は、そちらの列車も同時に出発させようとするものです。- ■ 自動運転 その10 ( 2019/12/21)
 先回と同じレイアウトと制御ロジックを使用して反対側のホームにも制御を追加しました。 さらももうひと列車を入線させて、合計3列車を同時運転させようと試みましたが、ことはそう簡単ではありませんでした。
先回と同じレイアウトと制御ロジックを使用して反対側のホームにも制御を追加しました。 さらももうひと列車を入線させて、合計3列車を同時運転させようと試みましたが、ことはそう簡単ではありませんでした。- ■ 自動運転 その9 ( 2019/12/17)
 今回の内容は、先回と同じレイアウトを使用して制御ロジックを変更してみました。なんとか多くの列車を同時に走らせたいという狙いのもとに、手始めといて追い抜きロジックを考えてみました。マイコンもPIC16F1827を使い、C言語で記述しました。
今回の内容は、先回と同じレイアウトを使用して制御ロジックを変更してみました。なんとか多くの列車を同時に走らせたいという狙いのもとに、手始めといて追い抜きロジックを考えてみました。マイコンもPIC16F1827を使い、C言語で記述しました。- ■ 自動運転 その8 ( 2019/12/10)
 KATO のチビ凸用動力ユニットが発売されました。 今回はこのモデルが楽しめるようなレイアウトにしてみました。
KATO のチビ凸用動力ユニットが発売されました。 今回はこのモデルが楽しめるようなレイアウトにしてみました。 - ■ 自動運転 その7の4 ( 2019/12/5)
 自動運転 その7の2のレイアウトでは運行状態を、その3ではソフトを紹介しましたが、今回は構成するハードを紹介しましょう。
自動運転 その7の2のレイアウトでは運行状態を、その3ではソフトを紹介しましたが、今回は構成するハードを紹介しましょう。- ■ 自動運転 その7の3 ( 2019/12/3)
 自動運転 その7の2のレイアウトでは運行状態を紹介しましたが、今回はその運行パターンとプログラムを紹介しましょう。
自動運転 その7の2のレイアウトでは運行状態を紹介しましたが、今回はその運行パターンとプログラムを紹介しましょう。- ■ 自動運転 その7の2 ( 2019/12/2)
 自動運転 その7の1のレイアウトに於いて、どの様な走行パターンが考えられるのか検討してみました。
自動運転 その7の1のレイアウトに於いて、どの様な走行パターンが考えられるのか検討してみました。
卓上レイアウトで楽しもう その1
- ■ 自動運転 その7の1 ( 2019/11/26)
 今回は、少しグレードアップさせました。自動運転は実施出来ていませんが、その予備実験の段階ですので「その7の1」としています。
今回は、少しグレードアップさせました。自動運転は実施出来ていませんが、その予備実験の段階ですので「その7の1」としています。- ■ 自動運転 その6 ( 2019/11/24)
 今回は、リバース線のあるレイアウトを実験してみました。 リバース線のスムースな制御と速度設定ボリュームによる走行速度の制御法について実験しました。
今回は、リバース線のあるレイアウトを実験してみました。 リバース線のスムースな制御と速度設定ボリュームによる走行速度の制御法について実験しました。- ■ 自動運転 その5 ( 2019/11/18)
 今回は、自動運転その4に簡単なヤードを設け、手動でのポイント操作であるが、そこからの電車の出入りが可能なレイアウトを実験してみました。
今回は、自動運転その4に簡単なヤードを設け、手動でのポイント操作であるが、そこからの電車の出入りが可能なレイアウトを実験してみました。- ■ 自動運転 その4 ( 2019/11/17)
 今回は、自動運転その3に信号機を追加し、発車と停車時に速度制御を追加しました。 また、レイアウト上にストラクチャを置い飾ってみました。
今回は、自動運転その3に信号機を追加し、発車と停車時に速度制御を追加しました。 また、レイアウト上にストラクチャを置い飾ってみました。
- ■ 自動運転 その3 ( 2019/11/16)
 自動運転その3は、ポイント制御と速度制御のトライのために、レイアウトと小判型に変更して実験することにしました。
自動運転その3は、ポイント制御と速度制御のトライのために、レイアウトと小判型に変更して実験することにしました。- ■ 自動運転 その2 ( 2019/11/11)
 先回、単純な一方向周回路パターンで走らせました。 今回はこれに制御回路をひとつ追加して、4個の閉塞区間と二つの停車ホームを設定しました。 制御方法は同じです。
先回、単純な一方向周回路パターンで走らせました。 今回はこれに制御回路をひとつ追加して、4個の閉塞区間と二つの停車ホームを設定しました。 制御方法は同じです。- ■ 自動運転 その1 ( 2019/11/10)
 準備した制御機器をレイアウトに組み込んでテストしてみましょう。 最初は、単純な一方向周回路パターンをで走らせてみます。
準備した制御機器をレイアウトに組み込んでテストしてみましょう。 最初は、単純な一方向周回路パターンをで走らせてみます。- ■ TCSセンサの信号出力 ( 2019/11/5)
 気になっていたTCSワンタッチセンサの信号出力を調査しました。 やはり、不安定な事がわかりましたので、レールセンサを使用する事にしました。
気になっていたTCSワンタッチセンサの信号出力を調査しました。 やはり、不安定な事がわかりましたので、レールセンサを使用する事にしました。- ■ 部品を揃える ( 2019/11/4)
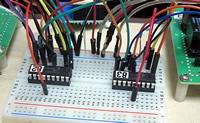
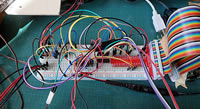
 まず最初に必要な部品を揃えます。 前提として、配線類はブレッドボード上に構成することを考えていますので、それに合った準備をしていきます。
まず最初に必要な部品を揃えます。 前提として、配線類はブレッドボード上に構成することを考えていますので、それに合った準備をしていきます。- ■ KATOの新動力ユニット ( 2019/11/1)
 KATOより新しい動力ユニットを採用したポケットライン・シリーズが発売されたので入手しました。 レイアウトはこたつの天板を利用した急増の卓上レイアウトです。こたつ天板を利用した卓上レイアウトで走らせているうちにに、またまた新しいテーマを見つけてしまいました。
KATOより新しい動力ユニットを採用したポケットライン・シリーズが発売されたので入手しました。 レイアウトはこたつの天板を利用した急増の卓上レイアウトです。こたつ天板を利用した卓上レイアウトで走らせているうちにに、またまた新しいテーマを見つけてしまいました。
そうだ、このミニレイアウトの上で、自動運転を楽しもう !
新ATSに挑戦 その4
- ■ 新ATSに挑戦 制御フローの見直し ( 2020/6/23)
 今回は、「名鉄特急3兄弟を整備するも・・・・・・・」(2020/6/22)にて生じた不具合の中から、その制御ロジックに疑問が生じたので、新しい考え方のロジックを検討することにした。
今回は、「名鉄特急3兄弟を整備するも・・・・・・・」(2020/6/22)にて生じた不具合の中から、その制御ロジックに疑問が生じたので、新しい考え方のロジックを検討することにした。- ■ 新ATSに挑戦 多くの列車を走らせよう ( 2019/2/11)
 新ATSシステムの設置作業も完了し、レイアウトとしての修正作業も仕上がったので、テスト走行を実施している。 今回は当初の目的であった多くの列車を同時に走行させる状態を見てみることにする。
新ATSシステムの設置作業も完了し、レイアウトとしての修正作業も仕上がったので、テスト走行を実施している。 今回は当初の目的であった多くの列車を同時に走行させる状態を見てみることにする。- ■ 新ATSに挑戦 信号機の不具合 ( 2019/2/11)
 新ATSシステムの設置作業も完了し、レイアウトとしての修正作業も仕上がった。 そして、テスト走行を実施していたら、幾つかの不具合が見つかった。 その対策を実施中にミスがミスを呼び、信号機修理を余儀なくされたのだ。
新ATSシステムの設置作業も完了し、レイアウトとしての修正作業も仕上がった。 そして、テスト走行を実施していたら、幾つかの不具合が見つかった。 その対策を実施中にミスがミスを呼び、信号機修理を余儀なくされたのだ。- ■ 駅構内の工事 その3 ( 2018/12/31)
 この新ATSシステムの設置作業も最後の山場に差し掛かった。 残るは駅構内の工事だけとなり、最後の駅の右側、即ち南側の部分の工作状況を報告する。
この新ATSシステムの設置作業も最後の山場に差し掛かった。 残るは駅構内の工事だけとなり、最後の駅の右側、即ち南側の部分の工作状況を報告する。- ■ 駅構内の工事 その2 ( 2018/12/17)
 設置に必要な制御機器の Sub-Assy 部品を工作したので、この部品を取り付ける工作を実施した。 今回は駅の左側、即ち北側の部分の工作状態を報告する。 そしてTOMIX製ポイントの落し穴に、すっぽりとハマってしまったのだ。
設置に必要な制御機器の Sub-Assy 部品を工作したので、この部品を取り付ける工作を実施した。 今回は駅の左側、即ち北側の部分の工作状態を報告する。 そしてTOMIX製ポイントの落し穴に、すっぽりとハマってしまったのだ。- ■ 駅構内の工事 その1 ( 2018/12/9)
 この新ATSシステムの設置作業も最後の山場に差し掛かった。 いよいよ残るは駅構内の工事に入ることにした。 まず、設置に必要な制御機器の Sub-Assy 部品を工作した。
この新ATSシステムの設置作業も最後の山場に差し掛かった。 いよいよ残るは駅構内の工事に入ることにした。 まず、設置に必要な制御機器の Sub-Assy 部品を工作した。
新ATSに挑戦 その3
- ■ 試運転の実施 ( 2018/11/22)
 ブリッジ部左側の工作も完了したので、通信線の周回路を完成させることが出来た。このため、駅構内のATS制御装置を未設置のままでスルーさせることにより、走行試験が可能となった。
ブリッジ部左側の工作も完了したので、通信線の周回路を完成させることが出来た。このため、駅構内のATS制御装置を未設置のままでスルーさせることにより、走行試験が可能となった。- ■ ブリッジ部左側の工作 ( 2018/11/22)
 信号機、センサ、および制御ユニットなどの制御機器をレイアウトに設置する作業を実施している。 今回は、ブリッジ部左側の工作について報告する。
信号機、センサ、および制御ユニットなどの制御機器をレイアウトに設置する作業を実施している。 今回は、ブリッジ部左側の工作について報告する。- ■ 高架部の工作 ( 2018/11/19)
 信号機、センサ、および制御ユニットなどの制御機器をレイアウトに設置する作業を実施している。 今回は、高架部の工作について報告する。
信号機、センサ、および制御ユニットなどの制御機器をレイアウトに設置する作業を実施している。 今回は、高架部の工作について報告する。- ■ 秋のゾーンの工作 ( 2018/11/18)
 信号機、センサ、および制御ユニットなどの制御機器をレイアウトに設置する作業を実施している。 今回は、秋のゾーンについて報告する。
信号機、センサ、および制御ユニットなどの制御機器をレイアウトに設置する作業を実施している。 今回は、秋のゾーンについて報告する。- ■ 制御機器の設置を始める ( 2018/10/30)
 製作した制御機器のレイアウトへの設置作業を開始した。 最初に冬のゾーンから始めてブリッジ部へも設置した。
製作した制御機器のレイアウトへの設置作業を開始した。 最初に冬のゾーンから始めてブリッジ部へも設置した。- ■ 信号機と制御ユニットを追加製作する ( 2018/10/27)
 「信号機の制作」で報告した信号機について、追加製作すると共に、背板も新しく工作して信号機らしく体裁を整えた。 また制御ユニットについても「制御ユニットの改良」で紹介したものを、追加製作した。
「信号機の制作」で報告した信号機について、追加製作すると共に、背板も新しく工作して信号機らしく体裁を整えた。 また制御ユニットについても「制御ユニットの改良」で紹介したものを、追加製作した。- ■ Bトレで遊んでいます? ( 2018/10/17)
 暫く報告が止まっていました。 それはBトレで遊んでいたからです・・・・・・・・・!
暫く報告が止まっていました。 それはBトレで遊んでいたからです・・・・・・・・・!
新ATSに挑戦 その2
- ■ Bトレで遊んでいます? ( 2018/10/17)
-
暫く報告が止まっていました。 それはBトレで遊んでいたからです・・・・・・・・・!
- ■ 駅構内の制御方法 出発制御の検討 ( 2018/10/6)
 製作した制御ユニットの機能チェックのために、書斎の床の上にレイアウトを組み、システムの作動状態を観察する。 駅構内の制御方法として、先回は入場制御の検討を実施したので、引き続き出発制御の検討を実施した。
製作した制御ユニットの機能チェックのために、書斎の床の上にレイアウトを組み、システムの作動状態を観察する。 駅構内の制御方法として、先回は入場制御の検討を実施したので、引き続き出発制御の検討を実施した。- ■ 駅構内の制御方法 入場制御の検討 ( 2018/10/5)
 製作した制御ユニットの機能チェックのために、書斎の床の上にレイアウトを組み、システムの作動状態を観察する。 今回は、駅構内の制御方法として、入場制御の検討を実施した。
製作した制御ユニットの機能チェックのために、書斎の床の上にレイアウトを組み、システムの作動状態を観察する。 今回は、駅構内の制御方法として、入場制御の検討を実施した。- ■ 改良した制御ユニットの機能チェック ( 2018/10/4)
 改良した制御ユニットの機能チェックを書斎の床の上に新しく組みなおしたレイアウトにて実施した。 今回のレイアウトは、駅構内での出発制御と入場制御のチェックを想定して、待避線のあるレイアウトとした。
改良した制御ユニットの機能チェックを書斎の床の上に新しく組みなおしたレイアウトにて実施した。 今回のレイアウトは、駅構内での出発制御と入場制御のチェックを想定して、待避線のあるレイアウトとした。- ■ 制御ユニットの改良 ( 2018/10/2)
 機能テスト中に感じた不具合を改良すべく制御ユニットを作り直した。 機能の分散と配線やチューニング作業の容易化など工夫してみた。
機能テスト中に感じた不具合を改良すべく制御ユニットを作り直した。 機能の分散と配線やチューニング作業の容易化など工夫してみた。- ■ 通過センサーの制作 ( 2018/10/1)
 信号機に続いて今度は通過センサーを作る。
信号機に続いて今度は通過センサーを作る。- ■ 信号機の制作 ( 2018/10/1)
 ブレッドボードを使って構成した制御ユニットの機能チェックの結果、回路構成とソフトの見通しが出来たので、少し具体的な部品製作を実施することにした。 最初に、線路際に置いても見栄えのする信号機を作って見よう。
ブレッドボードを使って構成した制御ユニットの機能チェックの結果、回路構成とソフトの見通しが出来たので、少し具体的な部品製作を実施することにした。 最初に、線路際に置いても見栄えのする信号機を作って見よう。- ■ 12F635 を使用する ( 2018/9/24)
 PICとして12F683 を使用しているが、同じ仲間の 12F635 が使いないのは何故なのか、疑問のままでは見過ごすことができなかったので、再度挑戦することにした。
PICとして12F683 を使用しているが、同じ仲間の 12F635 が使いないのは何故なのか、疑問のままでは見過ごすことができなかったので、再度挑戦することにした。
新ATSに挑戦 その1
- ■ 制御ユニットの機能チェック2 ( 2018/9/22)
 今回は、PWM制御方式のコントローラの使用や、フライホイール搭載の電気機関車、および室内灯を組み込んだ客車を走らせて、不具合の発生具合をみる事にします。
今回は、PWM制御方式のコントローラの使用や、フライホイール搭載の電気機関車、および室内灯を組み込んだ客車を走らせて、不具合の発生具合をみる事にします。 - ■ 制御ユニットの機能チェック ( 2018/9/20)
 製作した制御ユニットの機能チェックのために、書斎の床の上にレイアウトをくみ、システムの作動状態を観察した。
製作した制御ユニットの機能チェックのために、書斎の床の上にレイアウトをくみ、システムの作動状態を観察した。- ■ 制御ユニットの工作 ( 2018/9/19)
 ハード回路と搭載するプログラムの概要が確認できたので、いよいよ制御ユニットの工作を始めることにした。
ハード回路と搭載するプログラムの概要が確認できたので、いよいよ制御ユニットの工作を始めることにした。- ■ 給電ラインのチェック ( 2018/9/17)
 信号ラインの確認が出来たので、今度は給電ラインの確認を実施する。
信号ラインの確認が出来たので、今度は給電ラインの確認を実施する。- ■ 信号回路のチェック ( 2018/9/15)
 なんとか PIC マイコンを動かせるようになったので、実際の線路とセンサーを使って、初歩的な制御から少しづつステップアップしていく事にする。 通過センサのハード回路と処理ソフトの検証から実施しました。
なんとか PIC マイコンを動かせるようになったので、実際の線路とセンサーを使って、初歩的な制御から少しづつステップアップしていく事にする。 通過センサのハード回路と処理ソフトの検証から実施しました。- ■ 新ATSに挑戦 ハードの準備 ( 2018/9/12)
 制御の心臓部であるマイコンを8ピンタイプのPICマイコンを使うことに決めたが、その機種と周辺回路を固めて、必要な部品を揃えることにした。
制御の心臓部であるマイコンを8ピンタイプのPICマイコンを使うことに決めたが、その機種と周辺回路を固めて、必要な部品を揃えることにした。 - ■ 新ATSに挑戦 オプション回路の検討 ( 2018/9/10)
 先回報告した課題(4)と(5)への対応として、オプション回路を設定することにしたが、その概要を説明しておこう。 ここでの課題は、8ピンタイプのPICマイコンで対応できるのかどうかである。
先回報告した課題(4)と(5)への対応として、オプション回路を設定することにしたが、その概要を説明しておこう。 ここでの課題は、8ピンタイプのPICマイコンで対応できるのかどうかである。- ■ 新ATSに挑戦 構想 ( 2018/9/10)
 新しいATSシステムに取り組むことにした。このテーマは、2017年1月から始めた物置部屋のレイアウト改造を始めた当初から構想していたもので、その時のアイディアをいよいよ実現させることにしよう。
新しいATSシステムに取り組むことにした。このテーマは、2017年1月から始めた物置部屋のレイアウト改造を始めた当初から構想していたもので、その時のアイディアをいよいよ実現させることにしよう。
登山鉄道の新自動運転システム その2
- ■ 運行不具合の対応 その2 ( 2019/1/21)
 半年ぶりに登山鉄道の自動運転を作動させてみると運行パターンが正常に作動しないことが判明した。 そこで、その原因と判断したリレーを交換したが不十分であったので、考えていた対策を追加で実施した。
半年ぶりに登山鉄道の自動運転を作動させてみると運行パターンが正常に作動しないことが判明した。 そこで、その原因と判断したリレーを交換したが不十分であったので、考えていた対策を追加で実施した。- ■ 運行不具合の対応 ( 2019/1/20)
 半年ぶりに登山鉄道の自動運転を作動させてみた。 すると運行パターンが正常に作動しないことが判明した。 運行途中で止まってしまうのである。 そこで、原因究明と対策案を工夫してみた。
半年ぶりに登山鉄道の自動運転を作動させてみた。 すると運行パターンが正常に作動しないことが判明した。 運行途中で止まってしまうのである。 そこで、原因究明と対策案を工夫してみた。- ■ ロジックの改良と電車たち ( 2018/4/5)
 走行テストでの問題点に対して、ロジックの改良を実施した。 また、運行させる電車についても検討した。
走行テストでの問題点に対して、ロジックの改良を実施した。 また、運行させる電車についても検討した。- ■ 試運転の実施 ( 2018/3/16)
 Arduino の制御ロジックをスケッチとして記述し、無事書き込みも出来たので、試運転を実施した。 色々なトラブルが発生したが、その対応についても報告する。
Arduino の制御ロジックをスケッチとして記述し、無事書き込みも出来たので、試運転を実施した。 色々なトラブルが発生したが、その対応についても報告する。- ■ スケッチの記述 ( 2018/3/14)
 電子回路の動作チェックもなんとか無事に完了したので、いよいよソフトの出番となった。
電子回路の動作チェックもなんとか無事に完了したので、いよいよソフトの出番となった。- ■ 電気回路の動作チェック その2 ( 2018/3/12)
 電子回路が出来上がって来たので、その動作チェックを実施した。 先回に続き、信号回路の動作チェックを実施した。
電子回路が出来上がって来たので、その動作チェックを実施した。 先回に続き、信号回路の動作チェックを実施した。
登山鉄道の新自動運転システム その1
- ■ 電気回路の動作チェック その1 ( 2018/3/10)
 電子回路が出来上がって来たので、その動作チェックを実施した。 まず最初にポイント駆動と給電部の配線のチェックを手動運転回路を使って実施しした。
電子回路が出来上がって来たので、その動作チェックを実施した。 まず最初にポイント駆動と給電部の配線のチェックを手動運転回路を使って実施しした。- ■ 電子回路の製作 ( 2018/3/10)
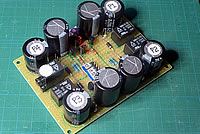
 回路構成も決まったのでいよいよ電子回路の工作を始めた。 メインボードは新しく作り、パワーボードは修正工作にて対応した。
回路構成も決まったのでいよいよ電子回路の工作を始めた。 メインボードは新しく作り、パワーボードは修正工作にて対応した。- ■ 通過信号処理回路の出力電圧 ( 2018/2/28)
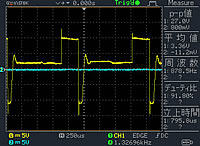
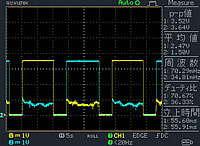
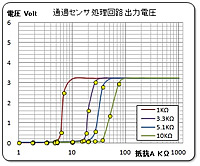 先回、センサ回路のオシロ波形を観察した結果を報告したが、この中で、通過信号処理回路の出力電圧が3.5 ボルトしか出ていない事に気が付いた。 その理由を考えてみたが、どうやら自分の勉強不足のような気がして、もう少し首を突っ込んでみることにした。
先回、センサ回路のオシロ波形を観察した結果を報告したが、この中で、通過信号処理回路の出力電圧が3.5 ボルトしか出ていない事に気が付いた。 その理由を考えてみたが、どうやら自分の勉強不足のような気がして、もう少し首を突っ込んでみることにした。- ■ 新自動運転システム 制御回路の検討 ( 2018/2/25)
 制御に必要な入力と出力項目を検討した結果、使い馴れた Arduino UNO が使える事がわかったので、ハード回路の検討を開始することにする。
制御に必要な入力と出力項目を検討した結果、使い馴れた Arduino UNO が使える事がわかったので、ハード回路の検討を開始することにする。 - ■ 新自動運転システム 構想 ( 2018/2/22)
 Raspberry Pi を使用しの自動運転システムを構築しようと挑戦してきたが、幾つかの課題が未解決のままであった。 今回のレイアウト大改造に合わせて、制御するマイコンを Raspberry Pi から、Arduino に変更して再挑戦することにした。
Raspberry Pi を使用しの自動運転システムを構築しようと挑戦してきたが、幾つかの課題が未解決のままであった。 今回のレイアウト大改造に合わせて、制御するマイコンを Raspberry Pi から、Arduino に変更して再挑戦することにした。
登山鉄道の自動運転システム その4
- ■ 道は遠し ( 2017/7/31)
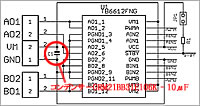
 ポイント駆動回路のパワーアップのために、3300μF のコンデンサを追加工作した。その結果をレイアウト上で確認したが、100点満点とは言えなかった。 まだまだ、どこかに問題がありそうである。 完成までには・・・・・・・・・・・・・・道は遠そうだ!
ポイント駆動回路のパワーアップのために、3300μF のコンデンサを追加工作した。その結果をレイアウト上で確認したが、100点満点とは言えなかった。 まだまだ、どこかに問題がありそうである。 完成までには・・・・・・・・・・・・・・道は遠そうだ!- ■ ポイント駆動回路の修正工作 ( 2017/7/27)
 ポイント駆動回路のパワーアップのために、「ポイント駆動回路のコンデンサー容量をアップさせる」で検討した結果をもとに、3300μF のコンデンサ追加工作を実施した。
ポイント駆動回路のパワーアップのために、「ポイント駆動回路のコンデンサー容量をアップさせる」で検討した結果をもとに、3300μF のコンデンサ追加工作を実施した。- ■ システムの制御状態の調査 ( 2017/7/21)
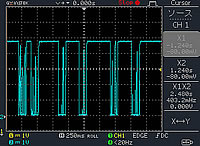
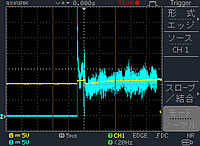
 改良したレールエンドをレイアウトに取り付けてテストを実施するも、システムとしてはどうもおかしいのである。 正常に作動してくれないのである。 そこで、どこかに問題あるのか、オシロを使ってセンサからの信号の出具合などを落ち着いて調査することにする。
改良したレールエンドをレイアウトに取り付けてテストを実施するも、システムとしてはどうもおかしいのである。 正常に作動してくれないのである。 そこで、どこかに問題あるのか、オシロを使ってセンサからの信号の出具合などを落ち着いて調査することにする。- ■ レイアウトでのテスト運用 ( 2017/7/15)
 合計6個の車止めが完成し、各ホームやレールエンドへの取り付けも何とか実施することが出来た。 そこで、これらのユニットをレイアウト上に設置し、正常に作動するのか、テスト運用を実施した。
合計6個の車止めが完成し、各ホームやレールエンドへの取り付けも何とか実施することが出来た。 そこで、これらのユニットをレイアウト上に設置し、正常に作動するのか、テスト運用を実施した。- ■ 車止め量産 ( 2017/7/14)
 車止め試作4号の量産(?)モデルをもとに、残りの4台を作ることにした。
車止め試作4号の量産(?)モデルをもとに、残りの4台を作ることにした。
登山鉄道の自動運転システム その3
- ■ 車止め試作4号 ( 2017/7/12)
 試作3号まで工作してきて、何とか形になって来たので、見栄えを少し良くする工夫を実施することにした。 今回は試作2号をベースにして修正工作を実施て試作4号機として量産(?)モデルとすることにした。
試作3号まで工作してきて、何とか形になって来たので、見栄えを少し良くする工夫を実施することにした。 今回は試作2号をベースにして修正工作を実施て試作4号機として量産(?)モデルとすることにした。- ■ マイクロスイッチを使った車止め ( 2017/7/3)
 作るなら、もう少しコンパクトな構成にすべく、最適なマイクロスイッチを探すことにした。 狙いは小型化と小さな作動力のスイッチであることだ。 今回は、幾つかのマイクロスイッチを使って実験することにした。
作るなら、もう少しコンパクトな構成にすべく、最適なマイクロスイッチを探すことにした。 狙いは小型化と小さな作動力のスイッチであることだ。 今回は、幾つかのマイクロスイッチを使って実験することにした。- ■ 車止めを作ろう ( 2017/6/27)
 システムを大規模にかつ複雑にするほど構成するセンサやアクチュエータの信頼性がより重要となることを改めて痛感した。そこで車止めの試作品を作って見た。
システムを大規模にかつ複雑にするほど構成するセンサやアクチュエータの信頼性がより重要となることを改めて痛感した。そこで車止めの試作品を作って見た。- ■ レイアウトでの運行 ( 2017/6/22)
 いよいよ最終ステップに入って来た。 まずは、モニタやマウス無しでも運転開始や終了が出来るような細工を実施すると共に、レイアウトでの運行をテストすることにした。
いよいよ最終ステップに入って来た。 まずは、モニタやマウス無しでも運転開始や終了が出来るような細工を実施すると共に、レイアウトでの運行をテストすることにした。- ■ 運行プログラムの構築 その2 ( 2017/6/20)
 先回は、登山モジュールをレイアウト上から降ろして腰を据えてテストを実施した。 何とか走行テストが実施出来るようになったので、いよいよ4列車運行モデルのテストを実施しする。 そして新しくサン・モリッツ号も入線させた。
先回は、登山モジュールをレイアウト上から降ろして腰を据えてテストを実施した。 何とか走行テストが実施出来るようになったので、いよいよ4列車運行モデルのテストを実施しする。 そして新しくサン・モリッツ号も入線させた。- ■ 運行プログラムの構築 その1 ( 2017/6/17)
 登山モジュールの工作も走行テストが可能なレベルまで仕上がったので、そっそくレイアウト上に設置してテストを行ったが、不具合続きで混乱してしまった。 そこで、モジュールをレイアウト上から降ろして、腰を据えてテストを実施することにした。
登山モジュールの工作も走行テストが可能なレベルまで仕上がったので、そっそくレイアウト上に設置してテストを行ったが、不具合続きで混乱してしまった。 そこで、モジュールをレイアウト上から降ろして、腰を据えてテストを実施することにした。
登山鉄道の自動運転システム その2
- ■ 登山鉄道モジュールの改造 ( 2017/6/16)
 制御回路とプログラムの概要が出来上がったので、今回からレイアウトを使った検討を開始した。 今回はまず、登山鉄道モジュールの手直しから始めた。
制御回路とプログラムの概要が出来上がったので、今回からレイアウトを使った検討を開始した。 今回はまず、登山鉄道モジュールの手直しから始めた。- ■ 複数の電車を同時に走らせる ( 2017/6/8)
- 異なる路線で複数の電車を同時に走らせる為には、二つのスレッドを並行して走らせなければならないのだ。 テスト用のレイアウトが準備できたので、このマルチスレッド・プログラムを検討した。
- ■ 複数の路線で走らせる ( 2017/6/8)
 システム検討もいよいよ佳境に入って来たが、最大の峠は、複数の電車を異なる路線で同時に走らせる方法をマスターする事と考えている。 まずはテスト用のレイアウトを準備する
システム検討もいよいよ佳境に入って来たが、最大の峠は、複数の電車を異なる路線で同時に走らせる方法をマスターする事と考えている。 まずはテスト用のレイアウトを準備する- ■ レールエンドの処理回路の改良 ( 2017/6/4)
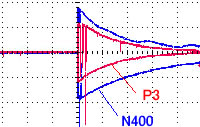
 まだ残っていた問題点の改良を検討した。レールエンド処理回路について反対側のLEDがチラチラ点灯する問題である。機関車の後方ライトがチラチラと点灯する件と同じ問題であるので、対策案としてスナバ回路を追加することを検討してみた。
まだ残っていた問題点の改良を検討した。レールエンド処理回路について反対側のLEDがチラチラ点灯する問題である。機関車の後方ライトがチラチラと点灯する件と同じ問題であるので、対策案としてスナバ回路を追加することを検討してみた。- ■ 往復運転モデル2の制御 ( 2017/6/2)
 作成した制御回路を使用して少し複雑な往復運転モデルを作った。基本となるいろいろな動作をプログラムに組み込んで、その動作確認をしようとするものである。 その制御内容を紹介しよう。
作成した制御回路を使用して少し複雑な往復運転モデルを作った。基本となるいろいろな動作をプログラムに組み込んで、その動作確認をしようとするものである。 その制御内容を紹介しよう。- ■ 到着信号処理回路の改良 ( 2017/5/31)
 先回のテストでは、プログラムの不安定な状態がたびたび発生した。 これは通常のモータが発するノイズの影響で、誤動作が発生していると想定して、もう一度、到着センサを再チェックしてみることにした。
先回のテストでは、プログラムの不安定な状態がたびたび発生した。 これは通常のモータが発するノイズの影響で、誤動作が発生していると想定して、もう一度、到着センサを再チェックしてみることにした。- ■ 往復運動モデル2を作る ( 2017/5/31)
 ハード回路の工作が出来たので、この回路を使用して少し複雑な往復運動モデルを作ることにする。 基本となるいろいろな動作をプログラムに組み込んで、その動作確認をしようとするものである。
ハード回路の工作が出来たので、この回路を使用して少し複雑な往復運動モデルを作ることにする。 基本となるいろいろな動作をプログラムに組み込んで、その動作確認をしようとするものである。- ■ 制御回路の工作 ( 2017/5/28)
 システムを制御する電気回路について、各要素の機能の検証結果は良好であったので、ハード回路の工作を安心して進める事が出来ると判断し、いよいよ実回路の工作に取り掛かった。
システムを制御する電気回路について、各要素の機能の検証結果は良好であったので、ハード回路の工作を安心して進める事が出来ると判断し、いよいよ実回路の工作に取り掛かった。
登山鉄道の自動運転システム その1
- ■ 往復運転モデルを作る その3 ( 2017/5/20)
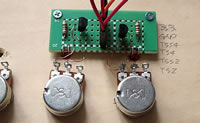
 システムを制御する電気回路について、ハード回路を制作する前に各要素の機能をそれぞれ検証していく事にする。 今回は速度設定処理回路を検証する。
システムを制御する電気回路について、ハード回路を制作する前に各要素の機能をそれぞれ検証していく事にする。 今回は速度設定処理回路を検証する。- ■ 往復運転モデルを作る その2 ( 2017/5/18)
 システムを制御する電気回路について、ハード回路を制作する前に各要素の機能をそれぞれ検証していく事にする。 今回はCdS センサを使用した車両の通過センサを検証する。
システムを制御する電気回路について、ハード回路を制作する前に各要素の機能をそれぞれ検証していく事にする。 今回はCdS センサを使用した車両の通過センサを検証する。- ■ 往復運転モデルを作る その1 ( 2017/5/18)
 ポイント駆動回路での実験につづいて、レールエンドの信号処理と、給電回路の実験を実施する。 この場合は、往復運転モデルを作れば、それぞれの機能が確認できるはずである。
ポイント駆動回路での実験につづいて、レールエンドの信号処理と、給電回路の実験を実施する。 この場合は、往復運転モデルを作れば、それぞれの機能が確認できるはずである。- ■ ポイント駆動回路の検証 ( 2017/5/13)
 システムを制御する電気回路の全体像を設定したので、ハード回路を制作する前に各要素の機能をそれぞれ検証していく事にする。 まず最初に一番気にしているポイント駆動回路から実験した。 そしてフリーホイール・ダイオードの必要性を確認した。
システムを制御する電気回路の全体像を設定したので、ハード回路を制作する前に各要素の機能をそれぞれ検証していく事にする。 まず最初に一番気にしているポイント駆動回路から実験した。 そしてフリーホイール・ダイオードの必要性を確認した。- ■ 電気回路の検討 ( 2017/5/11)
 システムを制御するための電気回路を検討する。 このシステムは、色々な要素を組み合わせて構成するが、それぞれの構成要素は今までの実施例や雑誌などを参考にして設定していく事にする。
システムを制御するための電気回路を検討する。 このシステムは、色々な要素を組み合わせて構成するが、それぞれの構成要素は今までの実施例や雑誌などを参考にして設定していく事にする。- ■ エンドレールでの表示と信号処理 ( 2017/5/9)
 エンドレールへの通電状態を表示する装置を自作することにするとともに、表示だけでなく、自動運転のための信号処理機能も付加することにした。
エンドレールへの通電状態を表示する装置を自作することにするとともに、表示だけでなく、自動運転のための信号処理機能も付加することにした。- ■ 緩衝器付エンドレールでの自動停止装置 ( 2017/5/1)
 構想にて説明したアイディアをひとつずつ検討していく事にしょう。まず初めに、システム不具合時に於いてもレールエンドに激突することが無いよう、TOMIX のエンドレールEを使った防止策から始めることにする。
構想にて説明したアイディアをひとつずつ検討していく事にしょう。まず初めに、システム不具合時に於いてもレールエンドに激突することが無いよう、TOMIX のエンドレールEを使った防止策から始めることにする。- ■ 登山鐡道の自動運転 構想
 物置部屋のレイアウトについて、大幅改造をしてみたいなとあれこれ思案中であるが、その一環として登山電車の自動運転の改良もそのテーマのひとつである。
物置部屋のレイアウトについて、大幅改造をしてみたいなとあれこれ思案中であるが、その一環として登山電車の自動運転の改良もそのテーマのひとつである。
自動運転システム その2
- ■ 給電ポイントの追加と電圧計の設置 ( 2016/12/13)
 駅構内では電圧降下が大きいので、その改善として、反対側にも給電ポイントを増設して、両側から給電することにした。さらに給電電圧を表示する電圧計も設置した。
駅構内では電圧降下が大きいので、その改善として、反対側にも給電ポイントを増設して、両側から給電することにした。さらに給電電圧を表示する電圧計も設置した。- ■ SLモデルのグループ分け ( 2016/5/28)
- 走行させる列車編成のために幾つかのグループに分類して同じグループ内で走行させるのがベターであると考えている。 今回は蒸気機関車に限って編成を組んだ場合の新しいグループ分けの方法を報告する。
- ■ 自動列車停止装置 グループ分けと走行動画 ( 2014/10/1)
 走行させる列車編成のために幾つかのグループに分類して同じグループ内で走行させるのがベターであると考え、グルーピングのための試行を実施してみた。
走行させる列車編成のために幾つかのグループに分類して同じグループ内で走行させるのがベターであると考え、グルーピングのための試行を実施してみた。- ■ 自動列車停止装置 試運転の実施 ( 2014/9/27)
 制御盤のチェックと調整が完了したので試運転を実施したが、色々なトラブルが発生してしまった。 システムとしての検討不足もあったが、鉄道模型の基本を再認識させられたことも勉強となった。
制御盤のチェックと調整が完了したので試運転を実施したが、色々なトラブルが発生してしまった。 システムとしての検討不足もあったが、鉄道模型の基本を再認識させられたことも勉強となった。- ■ 自動列車停止装置 制御盤の設置 ( 2014/9/27)
 制御盤が出来あがったので、いよいよレイアウトに設置して、調整とチェックを行った。
制御盤が出来あがったので、いよいよレイアウトに設置して、調整とチェックを行った。- ■ 自動列車停止装置 制御盤を作る ( 2014/9/26)
 不足していた部品を入手したので、追加工作を実施すると共に、内回り用の基板も新たに作成した。
不足していた部品を入手したので、追加工作を実施すると共に、内回り用の基板も新たに作成した。- ■ 自動列車停止装置 センサーの設置工事 ( 2014/9/25)
 レイアウト上でのテスト走行の結果、システムは機能する事が確認出来たので、いよいよ本格的に工事を実施する。 今回はセンサ工事を紹介する。
レイアウト上でのテスト走行の結果、システムは機能する事が確認出来たので、いよいよ本格的に工事を実施する。 今回はセンサ工事を紹介する。- ■ 自動列車停止装置 試験路を作る ( 2014/9/15)
 シーケンス制御といっても、自分には初めてのことなので、制御盤の工作と共に、レイアウトに試験路を作ってテストを実施する。 試験路は、3番、4番、5番の区間とし、4番と5番にリレーを接続したものである。
シーケンス制御といっても、自分には初めてのことなので、制御盤の工作と共に、レイアウトに試験路を作ってテストを実施する。 試験路は、3番、4番、5番の区間とし、4番と5番にリレーを接続したものである。
自動運転システム その1
- ■ 自動列車停止装置 システムの検討 ( 2014/9/12)
 レイアウトの区間割と制御回路の構想を進める。
検討していた制御回路はシーケンス制御なので、Arduino のお世話にならなくても良い事に気が付いた。
レイアウトの区間割と制御回路の構想を進める。
検討していた制御回路はシーケンス制御なので、Arduino のお世話にならなくても良い事に気が付いた。- ■ 自動列車停止装置 ATS のシステム要件 ( 2014/9/5)
 テスト走行を実施していた時に、システムを成立させるための条件や、あるいは制約事項が多々あることに気が付いた。このため、システムを構築するにあたり、システムに要求される要件をまとめる事にした。
テスト走行を実施していた時に、システムを成立させるための条件や、あるいは制約事項が多々あることに気が付いた。このため、システムを構築するにあたり、システムに要求される要件をまとめる事にした。- ■ 光センサーを使った通過センサーを作る (2014/9/4)
 マイクロスイッチを使用した簡易形のセンサーは見事に失敗してしまったが、今回は光センサーに挑む事にした。 そしてArduino とリレーシールドを使用したシステムとする。
マイクロスイッチを使用した簡易形のセンサーは見事に失敗してしまったが、今回は光センサーに挑む事にした。 そしてArduino とリレーシールドを使用したシステムとする。- ■ 簡易形ATSシステム (2014/8/29)
 マイクロスイッチを使った車両通過センサーを使用して、追突防止のための自動列車停止装置として簡易形のATSシステムをテストしてみた。 結果は見事失敗であった。
マイクロスイッチを使った車両通過センサーを使用して、追突防止のための自動列車停止装置として簡易形のATSシステムをテストしてみた。 結果は見事失敗であった。
******************************
TOMIXのTCS 自動運転ユニットN を使用した例です。
- ■ 物置部屋のレイアウト 第3期工事 その3 ( 2014/1/26 )
 物置部屋レイアウトの第3期工事として、照明の設置と地面の仕上げの作業を再開しています。 今回は駅のプラットホームと駅前の街並みに手を加えています。
物置部屋レイアウトの第3期工事として、照明の設置と地面の仕上げの作業を再開しています。 今回は駅のプラットホームと駅前の街並みに手を加えています。- ■ RTM東海サブ路線の自動運転設定 (2011/4/10)
- レイアウトのRTM東海の路面電車と登山鉄道、およびそれらを接続する郊外路線について、自動運転ユニットの設定条件を紹介する。
- ■ リバース線の検討 (2010/7/2)

- 昭和の街の鉄道にSLを走らせるからには、SLの方向転換が欲しくなります。かと言って転車台を設置する場所が無いため、リバース線を検討してみました。その自動運転のために、TOMIXのTCS 自動運転ユニットN を使用しました。
![]()