
HOME >> 鉄道模型自動運転システム > 往復運動モデル2を作る
登山鉄道自動運転システム 往復運動モデル2を作る
■ はじめに
システムを制御する電気回路についてハード回路の工作が出来たので、この回路を使用して少し複雑な往復運動モデルを作ることにする。 今度のモデルには、基本となるいろいろな動作をプログラムに組み込んで、その動作確認をしようとするものである。
■ 制御箱の内部配線の実施
まず最初に、制御箱の内部配線を実施した。 配線図と実物を見比べながら慎重に配線を実施した。 また、信号線の接続経路もExcel を使って整理した。 これはどの信号がどのポートにつながっているかを整理してあるので、プログラムを書いていく上で、重要な資料となるはずである。
機器不具合時の分解と再組付けを想定して、配線には記号と色分けを記入していった。
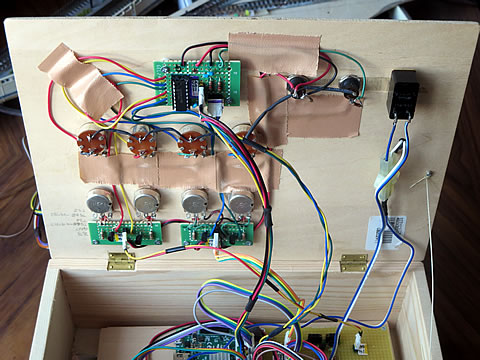
配線はゴチャゴチャであるが、これは予想していた事態なのであり、また蓋の中なので良しとしている。
■ 往復運転レイアウトの構成
プログラムのチェックを実施するテスト走行レイアウトとして、少し長めの往復運転レイアウトを狭い机の上に作った。


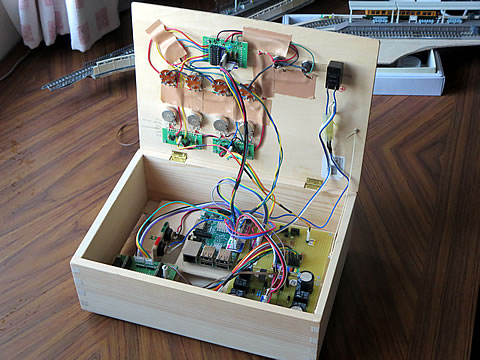
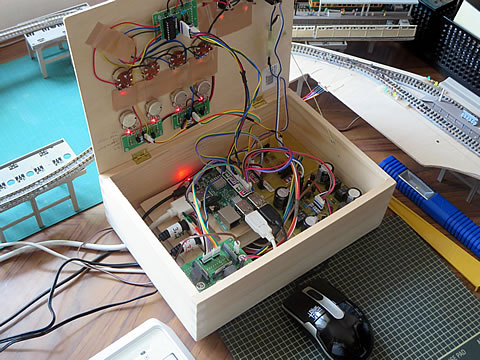
街中駅が高架構造なので、他の部分も高架橋を使って持ち上げている。 走行部分を長く取るためにループ構成とした。 パワーユニットを使っての試運転(上左の写真)は良好だったので、ラズパイのためのモニタ、キーボードとマウスを取り付けた。 その状態を上右に示す。
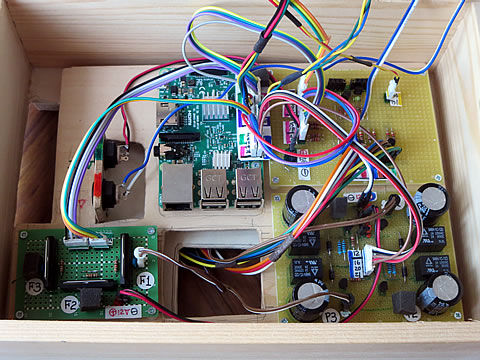
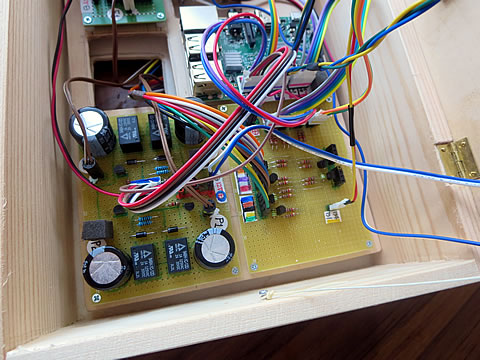
そしてケーブル類を取り付けた制御箱の中の状態を下に示す。
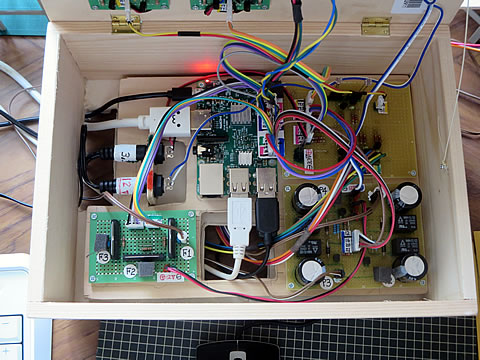
ケーブル類も問題無くセットすることが出来た。 これでハード側の準備は整ったのだ。
 .
.
■ A/D変換の確認
実際のプログラム作成を始める前に、単体での機能確認が出来ていなかったA/D変換部分の機能確認を実施する。 そして、プログラム記述上に必要となる変換後の数値も確認して置く必要が有るのだ。
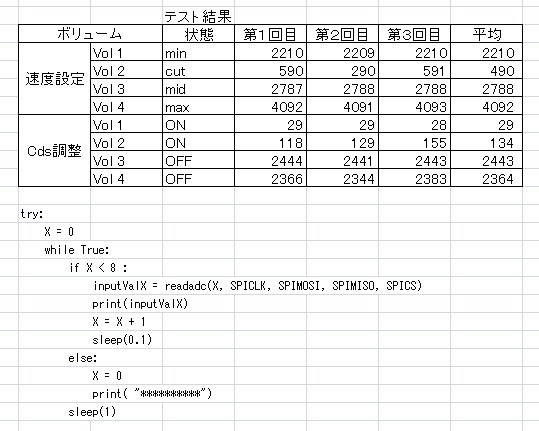
テスト用のプログラムは「往復運転モデルを作る その3」で使用したプログラムの try 部分を右の様に変更し、各ボリュームをいろいろな状態にセットして、得られたデジタル値をプリントアウトさせた。
この結果、速度設定ボリュームでは、
- スイッチがOFFの場合 1000 以下
- スイッチがONの場合 2200 以上
- ボリュームが最大の場合 約 4090
の値を示すことが分かった。 またCdS センサの場合は、
- ONの場合 200 以下
- OFFの場合 2000 以上
であることも分かった。
■ テスト走行モード 2−1
このモードでは単純な往復運転を実施し、正常に作動するか、一時停止スイッチの機能はどうか、速度調整機能は働くかなどを検証する。 プログラムの詳細は後からまとめ報告するが、まずは動作状態を紹介しよう。

まず、正常に作動することを確認し、新設した一時停止ボタンとしても利用できる12ボルト電源のON/OFFボタンも機能することが確認できた。 また、速度調整用のボリュームも上々である。
■ テスト走行モード 2−2
次に、2台の車両を交互に運転するモードを検討した。 このモードではポイントの操作と2台の電車の速度調整を確認する。 プログラムの詳細は後からまとめ報告するが、テスト中に正常にプログラムが進行しないトラブルが多発してしまった。 プログラム記述の問題かも知れないし、センサ系の不具合かも知れないが、ノイズによる誤動作が一番の原因ではないかと睨んだ。 特に、通常モータとPWM制御の関係が怪しいのでる。
そこで、PWM制御でも影響の少ないコアレスモータを搭載した車両を走行させてみた。 ただ、ミニポイントや急カーブのために、使用できるのはポイントが直進状態だけであったので、KATOのC12を使って走行させてみた。

何とか運行出来ているが、コアレスモータ車はここでは運用できないのである。 ホームは短いし、バック運転も不可能だ。 機関車だけならバック運転は出来ぬが客車をつないだ状態では機回しが必要となるのである。 さらに、コアレスモータの場合には、途中の速度変化が表れていないのだ。 PWM制御とコアレスモータの関係の影響と思われる。
通常のモータを搭載した電車が問題無く利用できるために、とにかく、もう一度PWM制御によるセンサ、特に到着センサの関係を再チェックしてみることにした。
2017/5/31 作成 M.T.