
丂丂HOME >> 揝摴柾宆帺摦塣揮僔僗僥儉丂> 丂戩忋儗僀傾僂僩偱妝偟傕偆丂帺摦塣揮 偦偺俀係丂俁廳墌宍楬偱偺敿帺摦塣揮
戩忋儗僀傾僂僩偱妝偟傕偆丂帺摦塣揮 偦偺俀係丂俁廳墌宍楬偱偺敿帺摦塣揮
丂崱夞偺戩忋儗僀傾僂僩偼丄億僀儞僩憖嶌傪庤摦憖嶌偵偟偨敿帺摦塣揮偲偟傑偟偨丅丂儗僀傾僂僩偼僔儞僾儖側俁廳偺墌宍儗僀傾僂僩偵偟丄拞墰晹偵懳岦宆偺儂乕儉偺偁傞墂偲偟傑偟偨丅丂擖慄傗弌敪偼庤摦憖嶌偺億僀儞僩偵廬偄丄儂乕儉撪偱偺尭懍掆幵偲丄敪恑壛懍傪帺摦塣揮偲偟傑偟偨丅丂捠忢偼奜廃楬傪憱峴偝偣丄僞僀儈儞僌傪尒偰墂偵擖慄偝偣偰傝丄弌敪偝偣偨傝偟偰梀傏偆偲偡傞傕偺偱丄偁偨偐傕堉巕庢傝僎乕儉偺傛偆偱偡丅
仭丂俁廳墌宍楬儗僀傾僂僩
丂傑偢丄儗僀傾僂僩傪徯夘偟傑偟傚偆丅丂侾斣儂乕儉偲俀斣儂乕儉傪愝偗丄偦傟偧傟傪墌宍儗僀傾僂僩偵偟丄偦傟傜傪廃夞偡傞墌宍奜廃楬偱寢傃傑偟偨丅丂壓嵍偺幨恀丅丂慁夞曽岦偼丄墂峔撪偺恑峴曽岦偵崌傢偣偰丄偡傋偰嵍慁夞偱偺塣峴偱偡丅丂傑偢丄TOMIX偺僐儞僩儘乕儔傪巊偭偰丄庤摦塣揮偱偺憱峴偵偰晄嬶崌偺妋擣傪幚巤偟丄儗僀傾僂僩忋偱偺栤戣偑側偄帠傪妋擣屻丄塣揮僷僞乕儞偺専摙傪峴偄傑偟偨丅
 丂丂丂
丂丂丂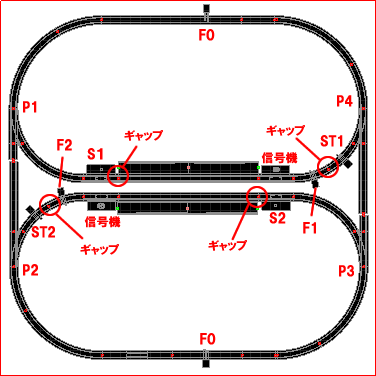
丂嶰偮偺墌宍楬傪傔偖傞帺摦塣揮僷僞乕儞傕峫偊傑偟偨偑丄摉弶偺梊掕捠傝偵丄堉巕庢傝僎乕儉偺曽朄偲偟傑偟偨丅丂懄偪丄億僀儞僩偺憖嶌偱丄擖慄偲弌敪傪巜帵偟丄儂乕儉撪偱偺尭懍掆幵偲丄敪恑壛懍傪帺摦塣揮偲偡傞偙偲偵偟傑偟偨丅丂偙偺偨傔偵昁梫側僙儞僒傗媼揹億僀儞僩傪峫偊偰丄忋塃偺慄楬攝抲恾偺傛偆偵丄僊儍僢僾偺埵抲丄僙儞僒偺埵抲丄媼揹億僀儞僩偺埵抲傪寛傔傑偟偨丅
丂偝傜偵丄弌敪恑峴傪昞帵偡傞怣崋婡傪愝偗傞偙偲偵偟丄乽戩忋儗僀傾僂僩偱妝偟傕偆丂帺摦塣揮 偦偺侾俈乿乮2020/2/5乯偱岺嶌偟偨怣崋傪愝抲偟傑偟偨丅丂傑偨丄揹幵偺摓拝傪専抦偡傞捠夁専抦偺儗乕儖僙儞僒S1偲S2偼丄僙儞僒専抦傪嶌摦偝偣傞偨傔偺捠揹偑億僀儞僩憖嶌偵傛偭偰媼揹偝傟傞傛偆偡傞偨傔丄墂峔撪偵愝偗偨僊儍僢僾偺埵抲偲億僀儞僩偺娫偵愝抲偟偰偄傑偡丅丂偙偺僙儞僒偺怣崋偵傛傝尭懍偲掆幵偺惂屼傪帺摦揑偵幚巤偟傑偡丅
丂傑偨丄掆幵拞偺揹幵傪弌敪偝偣傞偵偼丄弌敪懁偺億僀儞僩傪斀埵懁偵憖嶌偡傞偙偲偵傛偭偰億僀儞僩偺暘婒懁傪捠揹偝偣丄偦偙偵捠揹僙儞僒ST1偲ST2傪愝抲偟傑偟偨丅丂偙偺捠揹僙儞僒偺怣崋偵傛偭偰敪幵偲壛懍偺帺摦惂屼傪幚巤弌棃傞傛偆偵偟傑偟偨丅丂慄楬偐傜偼僼傿乕僟乕傪巊偭偰慄楬偺揹埑傪庢傝崬傒丄惂屼儃僢僋僗撪偺僽儗僢僪儃乕僪偵愝偗偨僼僅僩僇僾儔偱怣崋傪張棟偟傑偡丅


丂墂峔撪偺弌擖傝岥偺忬懺傪忋偺幨恀偵帵偟傑偡丅丂僊儍僢僾乮崟傗奃怓偺僕儑僀僫乕乯偺埵抲丄僙儞僒乕儗乕儖偺埵抲丄僼傿乕僟乕偺埵抲側偳傪帵偟傑偡丅丂怣崋婡偼丄+5V偲GND偺揹尮儔僀儞偲丄捠忢帪偵揰摂偝偣傞愒傑偨偼椢傪巜帵偡傞怣崋慄偺俁杮傪巊偭偰丄憖嶌斦偲愙懕偝偣偰偄傑偡丅
仭丂揹婥宯偺夞楬
丂崱夞偼丄儌乕僞僪儔僀僶傪DC12volt 偱嬱摦偝偣傞偨傔偵丄愭夞専摙偟偨 ROHM幮偺H僽儕僢僕僪儔僀僶乕僔儕乕僘偺BD6211F 偺懴埑巇條 7V 傪 36V 偵曄偊偰巊梡偡傞帠偵偟傑偟偨丅
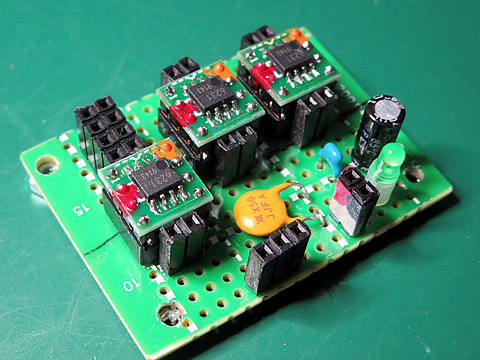
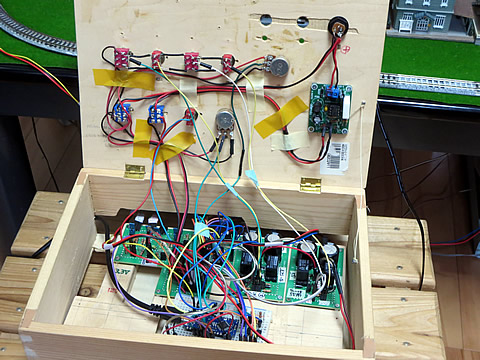
丂岺嶌偼丄乽儌乕僞僪儔僀僶BD6211F偺VREF惂屼儌乕僪傪幚尡乿乮2020/3/8乯偲摨條偵幚巤偟傑偟偨丅丂懴埑偺7V巇條偲36V巇條傪嬫暿偡傞偨傔丄傾僋儕儖奊嬶傪巊偭偰烌怓偲惵怓傪儁僀儞僩偟偰嬫暿偡傞傛偆偵偟傑偟偨丅丂忋嵍偺幨恀丅丂愒怓偺晹暘偼揹尮偵愙懕偡傞偨傔偺埵抲傪柧帵偡傞傕偺偱丄僪儔僀僶乕儐僯僢僩偵愙懕偡傞偨傔偺曽岦傪帵偡傕偺偱偡丅丂忋塃偺幨恀偼丄僪儔僀僶乕儐僯僢僩偵36V巇條偺IC傪憰拝偟偨忬懺傪帵偟傑偡丅丂傑偨丄GND偵愙懕偡傞怣崋慄偑偁傞応崌偵旛偊偰丄GND梡偺僺儞僜働僢僩傪捛壛偟傑偟偨偺偱丄偄偪偄偪儊僀儞偺儃乕僪傑偱攝慄傪墑偽偡昁梫偑柍偔側傝傑偟偨丅
丂崱夞偺揹婥宯攝慄恾傪壓偵帵偟傑偡丅丂儌乕僞僪儔僀僶偺幨恀偼屆偄巇條偺傑傑偱偡偑丒丒丒丒丒丒丒丒丒丒丅
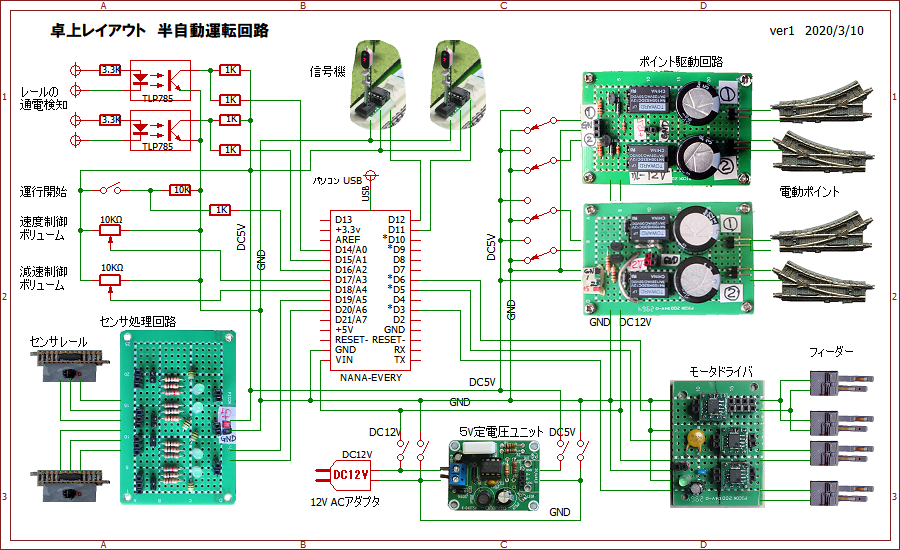
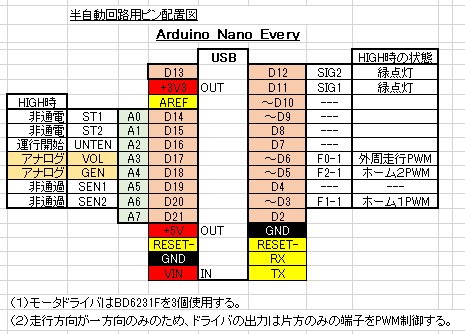
丂傑偢丄惂屼梡儅僀僐儞 Arduino Naneo Every 偺億乕僩傪寛傔偰偍偒傑偡丅丂壓嵍偺僀儔僗僩嶲徠丅丂擖椡宯偲偟偰丄揹幵偺捠夁傪専抦偡傞偄偮傕偺僙儞僒偼丄俀屄巊梡偟傑偡偺偱丄SEN1偲SEN2 偲偟偰攝抲偟傑偡丅丂傑偨丄怴偨偵愝抲偡傞捠揹僙儞僒偼丄僼僅僩僇僾儔偱怣崋張棟偟偨傕偺傪 ST1偲ST2 偲偟偰攝抲偟傑偟偨丅
丂塣峴奐巒偺怣崋偼UNTEN 偲偟偰擖椡偟丄揹幵偺憱峴懍搙傪傪挷惍偡傞傾僫儘僌怣崋傪VOL 偲偟偰庢傝崬傒丄怴偨偵掆幵偡傞応崌偺尭懍搙傪挷惍偡傞傾僫儘僌怣崋傪 GEN 偲偟偰庢傝崬傓傛偆偵偟偰偄傑偡丅
丂偙傟傜偺俈屄偺擖椡怣崋傪Every 偺嵍懁偵廤傔丄彮側偔側偭偨弌椡宯傪塃懁偵攝抲偟傑偟偨丅丂怣崋婡傊偺怣崋俀杮偲丄媼揹偺僨儏乕僥傿惂屼梡PWM 怣崋俁杮偺傒偱丄僗僉僗僉偵側偭偰偟傑偄傑偟偨偑丄慡帺摦塣揮偺応崌偺億僀儞僩惂屼抂巕係屄偼丄崱屻偺偨傔偵偲奐偗偰偄傑偡丒丒丒丒丒丒丒丒丅
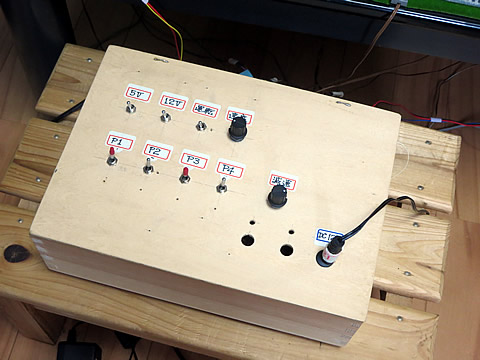
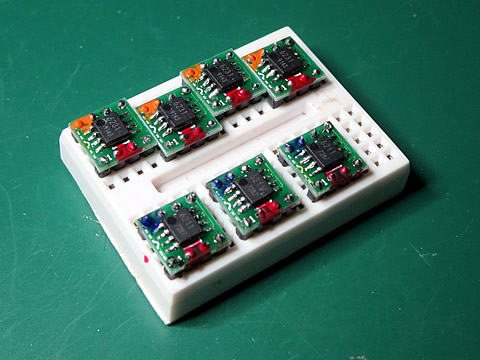
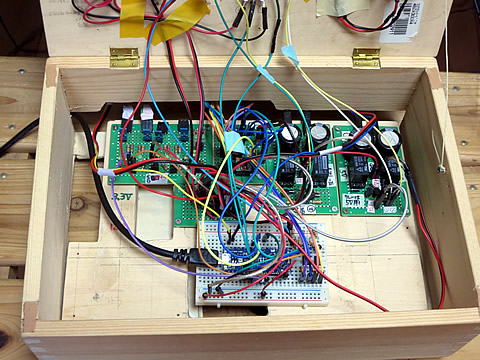
丂偦偟偰丄億僀儞僩傪憖嶌偡傞係屄偺僗僀僢僠偲尭懍搙傪挷惍偡傞壜曄掞峈婍傪怴偨偵愝抲偟傑偟偨丅丂偙傟傜偺僗僀僢僠椶傪捛壛偟偨憖嶌斦傪忋塃偵帵偟傑偡丅丂偦偟偰憖嶌斦偺棤懁偺攝慄忬懺傪壓偵帵偟傑偡丅丂攝慄傪彮偟曄峏偟傑偟偨偺偱丄捛壛攝慄傪偟偨偵傕偐偐傢傜偢彮偟僗僢僉儕偲偟偰偒傑偟偨丅
仭丂惂屼僾儘僌儔儉
丂攝慄偑寛傑傝傑偟偨偺偱丄僗働僢僠傪婰弎偟傑偟偨丅丂崱夞傕僾儘僌儔儈儞僌儈僗傗儘僕僢僋寚娮偵傛偭偰丄傗偼傝偡傫側傝偲偼峴偐偢偵僂儘僂儘偟傑偟偨偑丄傗偭偲壓婰偺傛偆偵傑偲傔傞帠偑偱偒偨丅
丂  丂.
丂.
- 婰弎撪梕傪暘偐傝堈偔偡傞偨傔丄奺僀儀儞僩傪僒僽丒儖乕僠傿儞壔乮崱偱偼丄娭悢偲偄偆偺偐側乯偟偰丄儊僀儞偺婰弎傪娙慺壔偡傞丅
- 傾僫儘僌怣崋GEN 偵傛偭偰尭懍搙傪挷惍弌棃傞傛偆偵婰弎偡傞丅
- PWM 廃攇悢傪 15.7KHz 偵愝掕偡傞丅
- 億僀儞僩憖嶌偵傛偭偰儂乕儉偵擖偭偰棃偨揹幵傪捠夁僙儞僒 SEN1 傑偨偼 SEN2 偑専抦偡傞偲丄怣崋傪愒偵偟偰尭懍惂屼傪巒傔偰掆幵偝偣傞丅
- 弌敪懁偺億僀儞僩憖嶌偵傛偭偰暘婒懁慄楬偵捠揹偝傟傞偲丄捠揹僙儞僒 ST1 傑偨偼 ST2 偑斀墳偟丄儂乕儉偵掆幵拞偺揹幵傪敪恑丒壛懍偝偣傞丅
- 儂乕儉侾偲儂乕儉俀偺掆幵傗敪幵偺僞僀儈儞僌偼旕摨婜側偺偱丄廳側偭偨応崌偼傗傓側偟偲偟偰柍帇偡傞偙偲偵偡傞丅丂擇偮偺巇帠偑摨帪偵幚巤偱偒傞儅儖僠僞僗僋偑偱偒側偄偨傔偱偡丅丂幚嵺偺僥僗僩偱妋擣偡傞偲丄屻偐傜擖慄偟偨揹幵偼掆巭偱偒偢偵儂乕儉傪捠夁偟偰峴偒傑偟偨偑丄偙傟偼偙傟偱丄夣懍揹幵偩偭偨偺偩偲尵偆偙偲偵偟偰偍偔偙偲偵偟傑偡丅
- 傂偲偮偺儂乕儉偱偼丄掆幵偲敪幵偺惂屼傪岎屳偵幚巤偡傞傛偆偵丄exist 偲偄偆曄悢傪巊偭偰丄侽偑侾偐傪敾抐偟側偑傜惂屼偝偣傑偡丅丂偦偺曄悢偼丄奺僒僽儖乕僠傿儞偺張棟傪幚巤屻偺嵟屻偵曄峏偟偰偦偺娭悢傪廔椆偝偣傞丅
丂嵟廔揑偵棊偪拝偄偨僗働僢僠丂佀丂Every-9F
丂怓乆廋惓偟偰丄愝寁曄峏晞崋偑F偵側偭偰偟傑偄傑偟偨丅丂懄偪愝曄A偐傜悢偊偰俇夞栚偺曄峏偲偄偆帠偱偡丅
仭丂僥僗僩塣揮偺幚巤
丂傑偢丄B僩儗偺愒偄揹幵傪巊偭偰僥僗僩塣揮傪幚巤偟丄僶僌偩偟傪幚巤偟傑偟偨丅丂M1T1偺俀椉曇惉傪擇偮巊偭偰塣揮偝偣傑偟偨丅




丂億僀儞僩憖嶌側偳傕椙岲偱偟偨偺偱丄彫墌慁夞楬傪僌儖僌儖夞傞帺摦塣揮忬懺偵偟偨帪偺摦夋傪徯夘偟傑偟傛偆丅

丂僞僀儈儞僌側崌傢側偄帪偺墂捠夁偺條巕傕偛棗偄偨偩偗偨偲巚偄傑偡丅丂偙傟偼偙傟偱妝偟偄傕偺偱偡偹丅丂師偵丄億僀儞僩憖嶌偵傛傞庤摦塣揮偺條巕傪徯夘偟傑偡丅

丂偙偺儌乕僪偱傕妝偟傔傞偺傕婐偟偄偱偡丅丂偮偓偼彫宆偺SL偲媞幵偺曇惉偱妝偟傒傑偟偨丅丂KATO偺彫宆忲婥婡娭幵 C12 傪巊偭偰彫宆媞幵俀椉傪尅堷偟偰偄傑偡丅





丂僐傾儗僗儌乕僞摦椡幵偺僗儉乕僗側掅懍偵尒偲傟偰偄傑偡丅丂傑偨丄俀戜偺摦椡幵偺摿惈偑傎偲傫偳僺僢僞儕偱偡偺偱丄摨偠傛偆側僞僀儈儞僌偱偄偮傑偱傕憱峴偟偰偄傑偟偨丅丂偝偡偑偼KATO偝傫偺媄弍椡偱偡偹丅
丂2020/3/14丂嶌惉