
HOME >> 鉄道模型自動運転システム > 卓上レイアウトで楽しもう 自動運転 その20
卓上レイアウトで楽しもう 自動運転 その20
卓上レイアウトの自動運転においていよいよ Arduino Nano Every を使って制御を実施しました。 先回のイライラはどこ吹く風ですんなりと作動するようになりました。
.
■ 新信号機の取付け工作
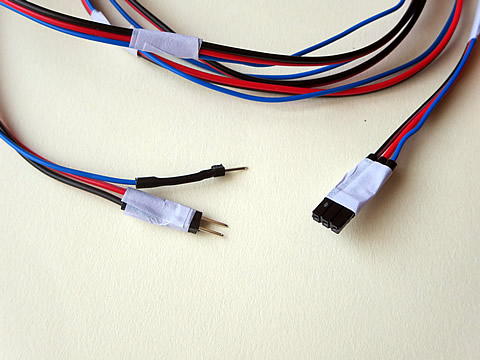
まず、新しく工作した信号機を接続するための配線を工作しました。 レイアウト配置上、長短の2本を準備する必要があります。 AWG24相当の電線を使った、ピンホルダとピンヘッドをハンダ付けしました。 ピンヘッド側は Arduino に、ピンホルダ側は信号機に接続します。

レイアウトに信号機を設置した状態です。 外周路と内周路における駅構内の出発信号として使用します。 運転中に撮影したので信号機は点灯していますが・・・・。


■ 制御回路の結線
制御用マイコンを取り換えたので、配線関係を変更しました。 信号機制御用配線を少なくしましたので、接続ポートに余裕があります。
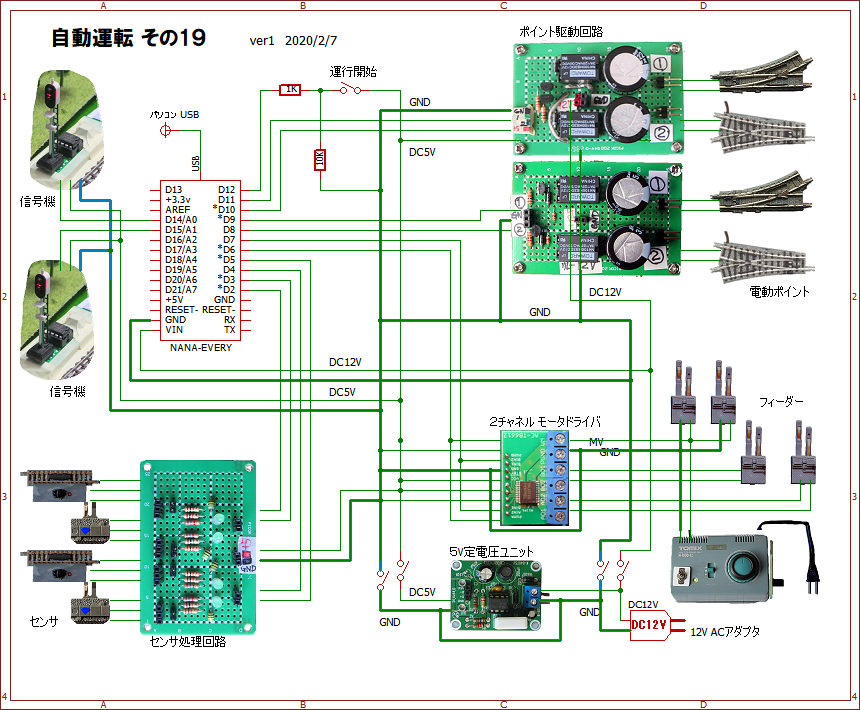
駅構内の給電制御は、一列車制御であるため、外周と内周用の制御をひとつにまとめています。 Arduino への電力供給は DC12volt を使用しており、Arduino からの+5volt 出力は使用していません。

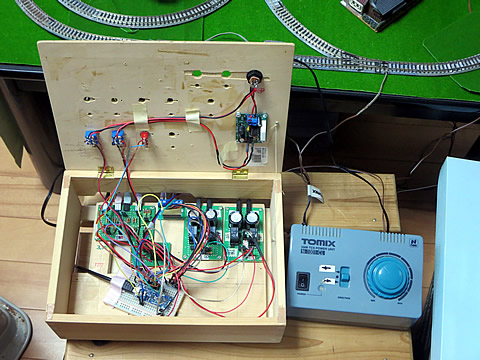
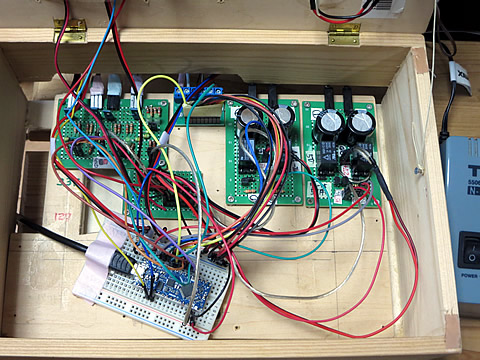
制御ボック内の配線は、あまり変わりませんが、少しは簡単になったようです。
 .
.
■ スケッチの記述とテスト走行
まず最初に、外周路を周回するだけのシーケンスを記述して運行状態を確認しました。
スケッチ: Every-1
一週目は駅を通過し、2周目に停車するモードです。 最初に、各ポイントの動作チェックを入れています。 また、駅を出発すると、センサS3を通過するチェックを入れています。 これは、駅構内のセンサS1 のチェックで駅を通過する事を検知するようにすると、出発時なのか、一周して来たのかの判断が出来ないので、中間チェックを実施するための細工です。 コースをショートカットしてズルをする輩を防止するのと同じ仕組みです。
また、この点を通過すると、1周目は緑を点灯し、2周目は赤を点灯させて駅に停車するというシグナルとしています。
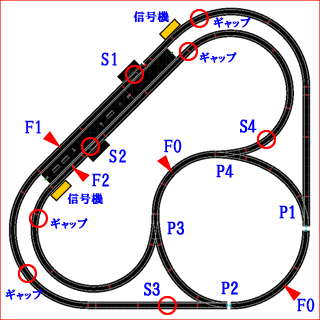
テスト走行中に、速度を早くすると、駅を発車すと間もなく、コントローラが赤ランプを点灯して給電を止めてしまうトラブルが発生しました。 原因は、停車信号を感知するのためのセンサS1の位置と、駅構内と外周路を遮断するギャップの位置が近すぎと事に気が付きました。 発車加速中のPWM制御が、100%にならないうちの列車がギャップを跨いでしまうと、外周路と駅構内の給電が連通した時に、電圧差が出てしまい、異常電流が流れるのではないかと判断し、右の図のように、ギャップの位置を遠くに移動させました。 この対策は効果がありました。
でも、そもそもここにギャップを設ける必要は無いのですよね。 一列車運行のため、走行している列車は一台しかないし、リバース線としてポイントを操作しても、ショートする配線ではないので、本来はギャップは不要なのです。 そして、制御も全線同時に制御すればよいのですが・・・・・・・・・・。 今までのいきさつ上このままにしています。
**********************************************************************
次に、外周路走行後、リバースモードに入って内周路に移動し、内周路を走行後、再びリバースモードに入って外周路に移動するシーケンスを記述しました。
スケッチ: Every-2
シーエンスをダラダラと順番に記述しただけのスケッチです。 途中でセンサの反応に異常があったばいの対応など、フェールセーフは一切考慮していません。 すべての要素が正常に働くものとして記述しています。 この時のテスト状態を下に示します。
◆ KATOのコアレスモータを搭載したBトレ機関車と旧型客車の編成で走らせました。

KATOのコアレスモータ搭載の動力車は、相変わらず低速でもスムースで力持ちですね。
◆ Bトレのカシオペアを走らせました。

◆ 何年かぶりにモデモの名鉄750形を走らせました。



最後に、ワイドビュー飛騨を走らせて、このレイアウトの有終の美を飾ることにします。

次回は、新しいレイアウトを検討することにしましょう。
2020/2/11 作成