
HOME >> 鉄道模型自動運転システム > システムの制御状態の調査
登山鉄道自動運転システム システムの制御状態の調査
■ はじめに
先回報告したように、改良したレールエンドをレイアウトに取り付けてテストを実施するも、システムとしてはどうもおかしいのである。 正常に作動してくれないのである。 そこで、どこかに問題あるのか、オシロを使ってセンサからの信号の出具合などを落ち着いて調査することにする。 作動の不完全な到着信号系とポイント駆動系を調査することにする。、
■ 実験の様子
物置部屋レイアウトの狭いスペースの中で、ラズパイのモニタ、キーボード、マウスの他に、オシロスコープを持ち込み、制御盤内での信号状態を観察した。

そして電圧測定のための端子は、基板上には適切の部分がなかったので、配線途中に設けることにした。 即ち専用の短い配線を工作し、その配線の中に測定端子を設けるようにした。 挿入する測定用の配線は、コントロールパネル・プレートとラズパイのGPIO 端子を結ぶ配線の一報を外し、その間に挿入するようにした。
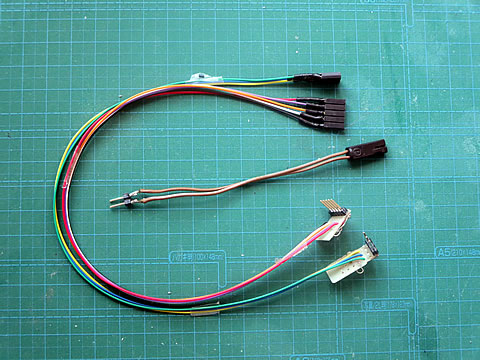
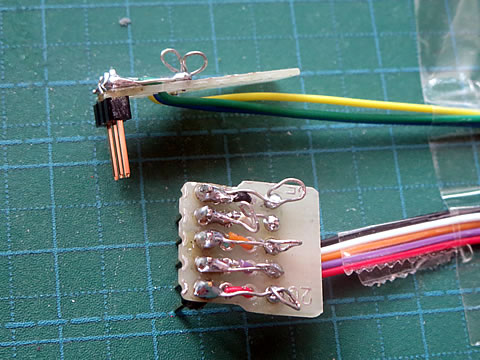
上左の写真。 この信号経路は、5本と3本の組となった配線になっているので、それに対応する測定用配線を作った。 一方の端子はメス型ピンホルダで、他方はオス型ピンヘッダとし、その接続部分に裸線のループを作って置いて、このループにオシロのプローブを引っ掛けるようにした。 上右の写真。
また、上左の写真の中央部の配線はポイント駆動回路用で、以前に工作したものである。 ピンヘッダの裸線部分にプローブを引っ掛ける予定である。
■ 到着信号の観察
まず、電車がレールエンドまで到着した事を知らせる到着信号の様子を調べることにした。 今回の改良は、TOMIX のエンドレールEを使ったセンシング方式からLinkman 製のフォトインタラプタ BPR-105F を使用する方式に変更している。 この方式変更による信号処理が確実にラズパイまで伝達されているかを確認する。
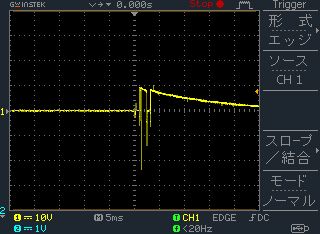
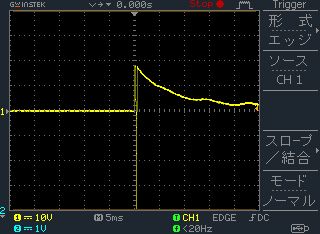
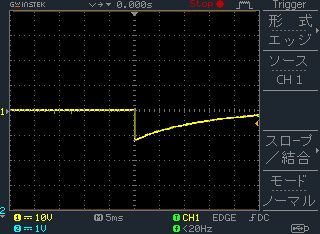
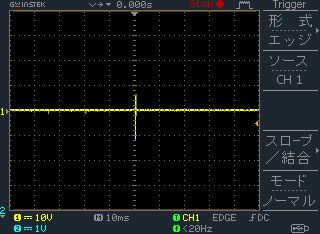
まず最初に、到着信号 SS3 (スイッチバック部)と SS6 (山頂部)の端子部分と、ラズパイの GPIO19と 26 の端子部分をつなぐ配線中に測定用の配線を差し込み電圧波形を観察した。 そして、プログラムを走らせた状態で、センサレバーを手で押してセンサを作動させた時の波形を下に示す。
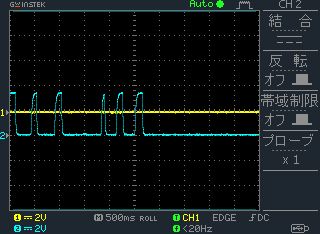
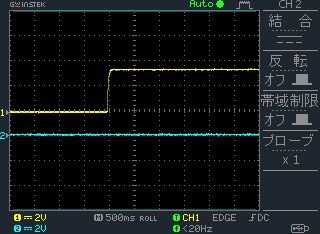
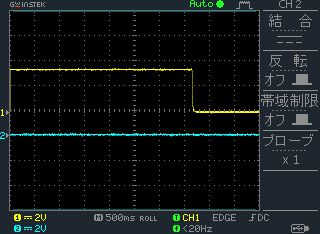
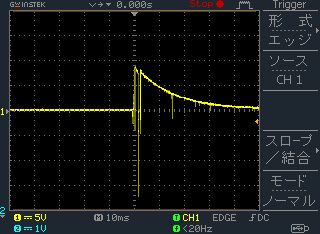
二つのセンサは共に正常に作動していることが分かる。 ノイズもほとんど観察されなかった。 立上がりや立下り部分を見るために縦と横のスケール倍にした場合を下に示す。 効きすぎるコンデンサの影響で波形はかなり鈍っているいるが、悪影響はなさそうなので回路はこのままの状態で使用することにする。
信号処理回路は、予想に反して全く綺麗で正常であった。 では、システムがおかしい原因は他にあるのだろうかと思案していたとき、ふと気が付いた。 到着信号がONになると、GPIO端子は3.3Vになる、即ち HIGH になるのであるが、プログラムをチェックすると・・・・・・・・・・・!
ロジックが逆になっている !
どこでどう間違えたのか、頭が混乱して間違えた原因調査はそのままにし、信号処理部の記述を修正した。
なんと、関係する部分の記述は下記のようであった。
while GPIO.input(19) == GPIO.HIGH:
sleep(0.2)
while GPIO.input(19) == GPIO.HIGH:
sleep(0.2)
return
このような記述では、このwhile 命令の条件式が成立している間(センサがONの場合)は留まっているが、不成立の場合(センサがOFFの場合)はパスして、通り過ぎていくのだ。 センサがONになるまで待っていてくださいのつもりが逆なのである。 せっかく苦労して設置したセンサが意味を為さなかったのである。 なんと耄碌したことか・・・・・・! 間違えていた HIGH の記述を LOW に変更した。
プログラムを修正して、ソフトを走らせると、大成功であった。 シーケンスは正常に進行するのである。 ただし、ポイントの作動を除いて!
■ ポイントの駆動回路の波形
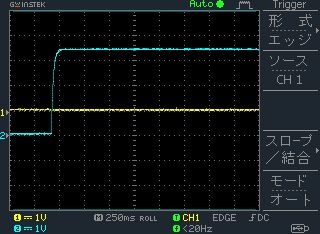
もう一つの不具合点であるポイント動作の不確実さについても電圧波形を観察することにした。 ポイント駆動回路の出力端子とポイントの配線端子の間に、上記の配線を挿入し、配線の白色側を GND にしてオシロのプローブを取り付けた。 チェックしたポイントは不具合の多かったP4 のポイント回路である。
この測定方法は、まず、オシロの設定をパルス測定状態にして、パルスを検知すると一発測定してストップする状態にしておく。 そして、プログラムをポイントを順番に駆動する専用ソフトを引っ張り出してきて走らせたのである。 不安定なポイント動作を報告した「運行プログラムの構築 その2」にて使用したものである。
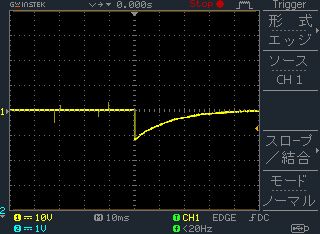
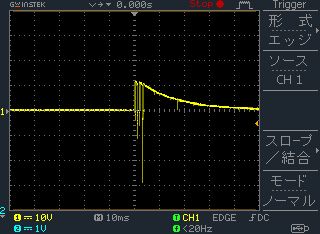
この時のオシロ波形を下に示す。
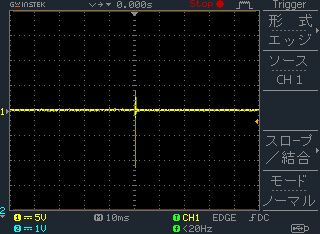
チャタリングが発生し、一方の波形が出て来ないのである。
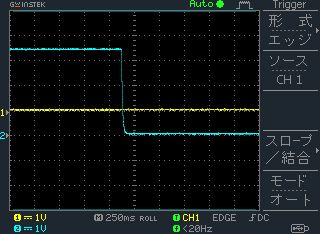
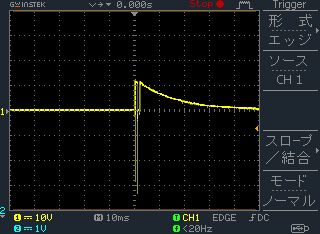
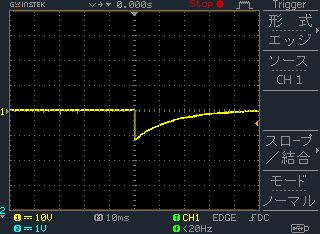
そこで、この P4 ポイントをパワーユニット N-400 で駆動してみた。
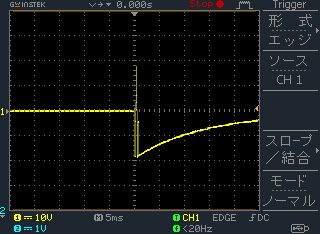
全く正常に、かつ確実に作動していた。 波形的にも綺麗なものである。 即ち、ポイントそのものに異常は無く、悪いのは駆動回路の方であることが分かった。
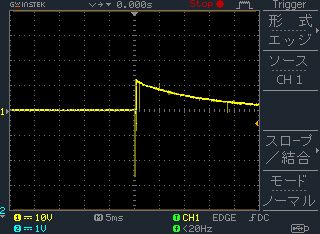
そこで、各ポイントの駆動回路に同じP4ポイントを接続して波形を観察した。 まず、P1 駆動回路では、
次に、 P2 駆動回路では、
次に、 P3 駆動回路では、
問題の P4 回路では、
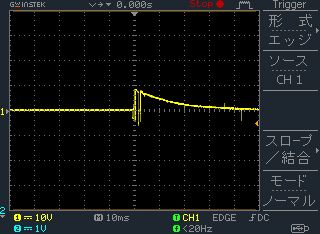
である。 P1〜P3 の駆動回路は正常に作動しているようで、P4 のみおかしい事が分かった。
 .
.
■ ポイント駆動回路の波形の比較
オシロではデジタルデータとして保存する機能があるが、今回も手っ取り早く実施できる画面のハードコピーで保存する方法を実施してきた。 そこで、このオシロ画面の画像を細工して波形部分を抽出することにした。
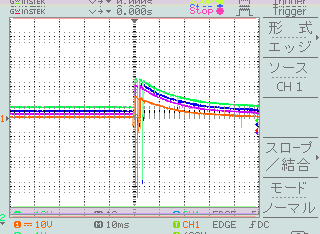
その手順は、オシロ画面の画像 ⇒ 反転 ⇒ コントラストをアップ ⇒ 色相をいじって色を変える ⇒ バックを透明にする ⇒ 画像を重ねる を実施して比較することにした。 このため、縦横のスケールの合致した画像を選択し、P1〜P4 の波形を比較した。 右の画像。
 .
.
ここで、重ね合わせた時、P1〜P3 の画像はピタリと一致してしまうので、縦の方向に少しずつずらして表示している。 ただ、P4 だけは少し低い波形を示している(茶色の線)。 反対方向のデータも同様であった。
このことより、P4 の回路だけがどこかに異常がある事を示唆していると判断する。
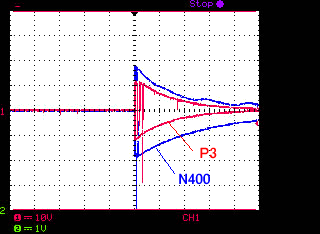
次に、パワーユニット N-400 との比較も実施してみた。 左の画像。
エェ- 、 ムムム・・・・・・・・・・・・!
ポイントを駆動するパワーが違うのだ!
我が設計のポイント駆動回路 P3 では12volt の電圧をバッチリと出しているが、N400 では 20volt に近いし、裾も長いのである。 波形の面積をパワーと解釈するならば、倍以上も違うではないか!
以前に、TOMIXのN-401 の内部回路を調査したことがあった。 「ポイントの切替駆動の制御方法」である。 この時の調査では、18.5volt と2200μF の組み合わせである事を調べていたはずである。 また、「パワーユニットを知ろう TOMIX製パワーユニットN-1001-CL の分解」では、12volt ではあるが、コンデンサは 4700μF もあった。 せっかくの調査結果が行かされていないが、ネットや雑誌「電子工作マガジン」の情報だけでは不充分であったと反省する。
そこで、もう一度、実際のパワーユニットを使って、色々なポイント駆動回路の電圧波形を、実際に測定してみることにしよう。 その結果によって、駆動回路のパワーアップ方法を検討することにする。 電圧アップか、コンデンサ容量アップか・・・・・・・・!
2017/7/21 作成 M.T.