
HOME >> 鉄道模型自動運転システム > 卓上レイアウトで楽しもう 自動運転 その23 十字路の交互運転
卓上レイアウトで楽しもう 自動運転 その23 十字路の交互運転
先回の「卓上レイアウトで楽しもう 自動運転 その22」(2020/2/25)にて、クローバー路線での自動運転をやっと満足できるレベルまで持つ込むことが出来ました。 そこで、最初から予定していた2列車の同時運転に挑戦しました。 注目点は、十字路の交互運転です。
■ 運行シーケンスの検討
2列車を運行させるシーケンスについては、「卓上レイアウトで楽しもう 自動運転 その21」(2020/2/19)で検討しました。 この結果、ギャップの位置を変更した線路に修正しましたが、報告のとおりドライバを焼いてしまいました。 新しく工作したドライバの作動が確認出来ましたので、この2列車を運行させる実験を再開しました。
そして、先回の検討に従って整理したシーケンス表を下に示します。 今回は8の字を描く運行パターンを採用しました。

まず、二つの列車が同時にコーナー部を周回走行しますが、この周回部は、右回りと左回りの場合があります。 このシーケンス表を見ているとお分かりのように、それぞれのコーナーの周回方向はどの場合でも同じであることに気が付くと思います。
そこで、その方向に給電されるようにフィーダー線を接続すれば、一つの制御用ドライバで対応できるのでき、その制御は、走行速度を調整すボリュームの情報によって制御するものであるため、シーケンスとは関係なく制御されるのです。 そこで、シーケンス表にはる加速と減速を実施する F1 と F2 のフィーダーを対象としました。 さらにF1 は北行きしか無いので、片方のみ制御すればよい事がわかります。
ポイントの制御は、どのタイミングで、どのポイントをどちらに制御すればよいかも整理しました。 表の緑色の部分は定位である事が必要な部分であり、青色の部分は変異である事が必要なシーケンスを示しています。 従って、色が変化する最初の部分でポイント操作をすればよい事が分かります。
また、各ステップにおいて、次のステップに移る等のアクションが必要となる状態を監視する必要があるのですが、これをセンシングするセンサーも明示しました。 このセンサからの信号をチェックすればよいのです。
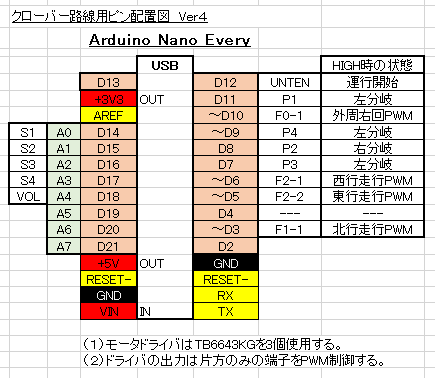
また、スケッチを作成するにあたって、Arduino Nano Every のポート配置は下記のように設定しました。 外周路のPWM制御がひとつになったので、D4ポートを開けました。
■ 制御用のスケッチの記述
スケッチを記述するにあたって、まず、速度調整ボリュームを操作した場合、それにすぐ応答できるよう、速度調整命令を各所に配置しました。 割り込み等の高等テクニックは使用していません。
次に、途中で制御方向が変化する場合があることに注意しました。 それは、No.3 と No.13 のステップです。 これは先行して走行した電車と後から走行してくる電車の進行方向が逆になるからです。 このとき、片方の線路への給電を完全に落としてから、反対側の線路に給電する必要がありますますので注意しました。 また、ポイントの切り替えもこのタイミングで実施します。
また、停車のための記述は、下記のようにしました。 どちら側の電車が早く到着するのか不明であるので、先に到着した電車は、後から来た電車が到着するまで待たせる必要があるからです。 変数 feed1 と feed2 を通電情報とし、両方の通電がストップするまで待つようにしました。 また、停車時には減速させたいのですが、減速中に他方が到着したらタイミングを逃してしまうのではと考えて、急停車やむなしとしています。 もう少し工夫の仕方があったかも知れません。
**********************************************************************
//NO.9 and 10
feed1=1;
feed2=1;
while(feed1==1 || feed2==1){
vol=analogRead(VOL)/6;
delay(10);
analogWrite(F0_1,vol);
sen4 = digitalRead(SEN4);
if(sen4==LOW){
analogWrite(F2_1,0);
feed2=0;
}
sen2 = digitalRead(SEN2);
if(sen2==LOW){
analogWrite(F1_1,0);
feed1=0;
}
}
delay(1000);
*************************************************************************
この制御方法に自信が無かったので、取り合えず、No.6 〜 No.15までのステップを少し修正して、東北と南西コーナーを周回するスケッチで実験しました。
実験したスケッチ ⇒ Every-7A.html
その結果、問題なく作動したので、全ステップを記述しました。
正式スケッチ ⇒ Every-7B.html
走行テストを実施した状態を下に示します。 Bトレの電車を、動力車とトレーラー車の2両編成を二組作って走らせました。


いつもの様に動画を紹介しましょう。
PWM制御の周波数が約 1kHz と低いため、動きがぎごちなく感じられますし、ピーという音も気になります。 やはり、周波数は高くする必要があるようです。 また、町の様子が寂しいので、あり合わせの車両を置いてみました。 少しは街らしくなりましたね。


まだまだ、微調整は必要があるようですし、二つの動力車の走行特性が異なっている動力を使用した場合の状態も確認していません。 スピードの違いが大きい場合には、追突や衝突などのいろいろなトラブルが発生するものと想定します。
でも、この状態の深堀は止めて、次はPWM制御のキャリや周波数の改善を検討したいと思います。
2020/3/1 作成