
HOME >> 鉄道模型自動運転システム > 卓上レイアウトで楽しもう 自動運転 その5
卓上レイアウトで楽しもう 自動運転 その5
今回は、自動運転その4に簡単なヤードを設け、手動でのポイント操作であるが、そこからの電車の出入りが可能なレイアウトを実験してみました。
■ 自動運転その5の紹介
今回は、説明を後にして、まず動画から紹介しましょう。 動画を見ると、何をしているのかが容易に理解できると思います。

■ 配線構成の改善
ブレッドボードを使った配線では、ゴチャゴチャしてしまい、作業も手間同士、見てくれも良くないので、出来るものからユニット化していく事にしました。 まず、センサの処理回路は回路構成が固まっていますので、ユニット化することにしました。
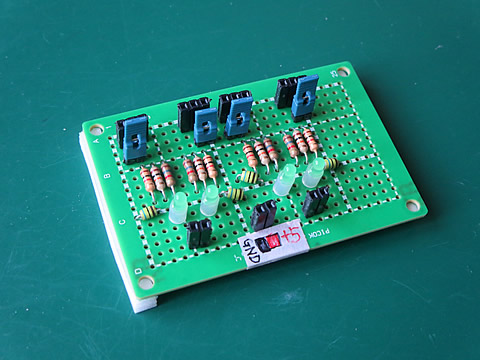
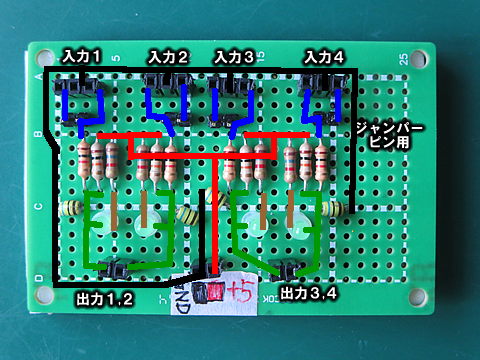
その工作品を下に示します。 25×15穴のユニバーサル基板の上に、4回路分を構成しました。 TOMIXのセンサは進行方向も検知するのですが、ジャンパーピンとピンヘッドを使って選択できるようにしました。 ピンヘッドにジャンパーピンを差込むと、両方を一緒に検知します。 それぞれの方向を検知したい場合には、ジャンパー線を使って構成すれば、出力1と2に出力する事ができます。
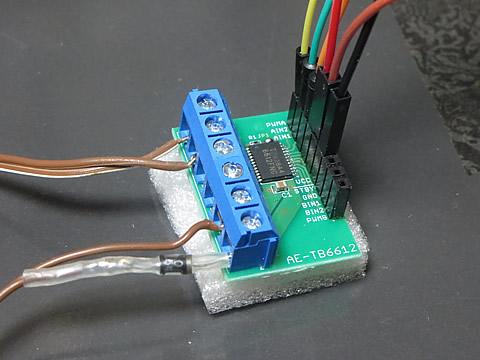
つぎに、モータードライバの回路も、制御信号をジャンパー線で結線出来るように裏側にハンダ付けしたピンヘッドを取り去り、表側にピンホルダを取付けました。 下左の写真。 そしてコントローラからの給電線も、ダイオードを取り付けた専用線に加工しました。 でも、ダイオードの向きを間違えて逆にハンダ付けしてしてしまったので、想定していた逆の操作となってしまいました。
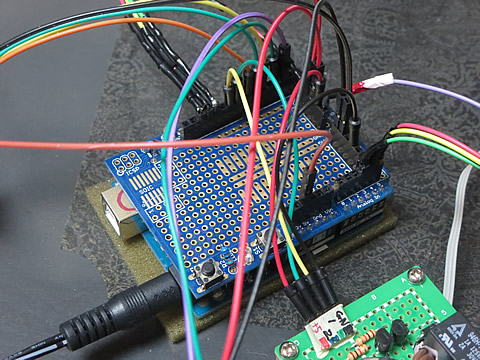
また、各ユニットへの信号用 +5ボルトの電力供給のために多くの接続部が必要でした。 このためブレッドボードを使用していたのですが、昔購入したままの、Arduino 用のプロトシールドを思い出し、これを使用して電源供給のための端子としました。 下右の写真。 プロトタイプシールド for Arduino - ブレッドボード付き です。 このシールドには、工作が容易なように特別なパターンが作ってあるのですが、電源としての+5ボルトとGND用の端子が、それぞれ5本も設置されているので、その端子を利用することが出来ます。 Arduino 自信のポートもそっくりそのまま受け継いでいますので、Arduino 本体の上にかぶせて使用すれば、配線用のユニバーサル基板を使用する必要は無くなりました。
 .
.
■ レイアウトの変更
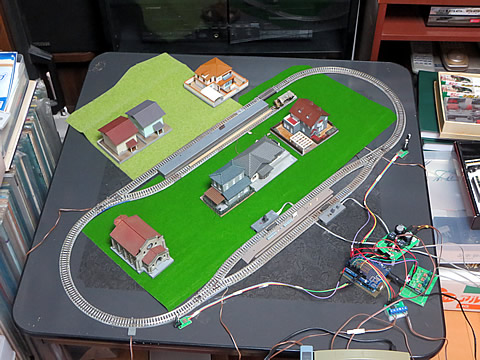
線路配置は、 自動運転 その4にヤードを追加したレイアウトとしました。
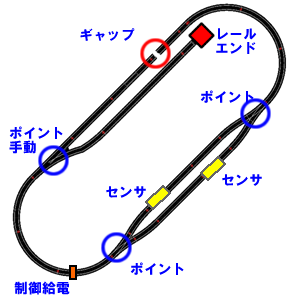
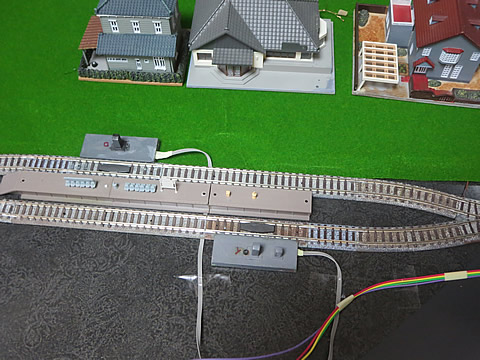
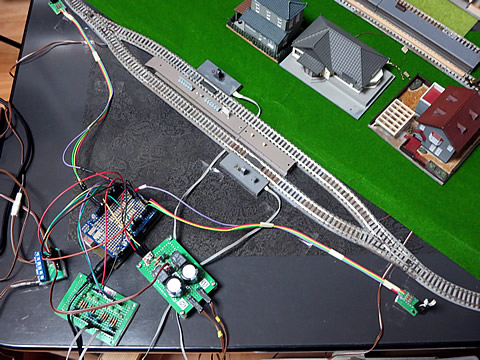
そして、ヤードと平行した本線部分にギャップを設けています。 また、駅の部分でのセンサ位置を中央からズラス事にしました。 これはセンサを検知してから停車するまでの距離を充分に取るためです。 その状態を右上に示します。 ヤード出入繰口のポイントは、手動操作としました。 また、ヤードの線路端には、我が特製のエールエンドを配置しています。
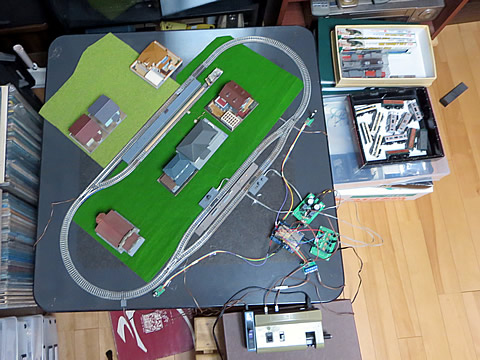
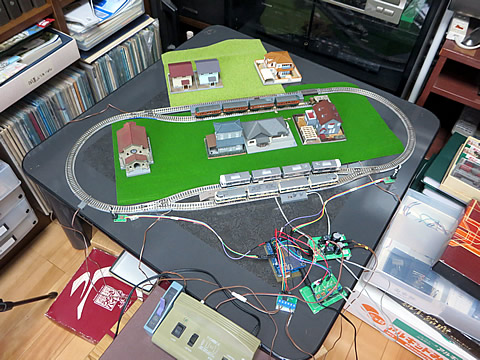
レイアウト状況を下に示す。

 .
.
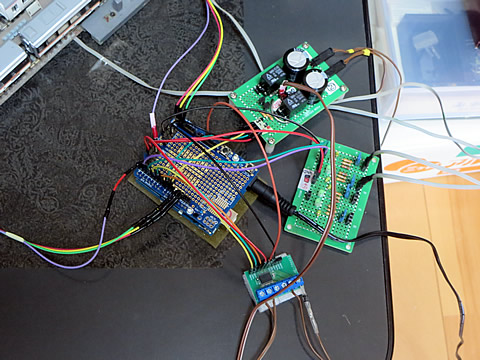
配線具合が、かなりすっきりとしてきました。 右の写真に示す様に、のメインのシールド付き Arduino と、ポイントコントロールユニット、センサユニット、 そしてモータドライバの4個のユニットで構成し、その間をジャンパー線で配線しています。
■作動状態
作動状態は上記の動画のとおりですが、3編成の電車を走らせています。 プログラム(スケッチ9先回の自動運転その4の時のスケッチをそのまま使用しています。
でも、やはりスタート時はやはりモタモタしてしまいますので、やはり改善が必要です。 ヤードの操作は、タイミングがありますので、ポイントコントロールユニットを追加して、自動運転化するのが良さそうです。
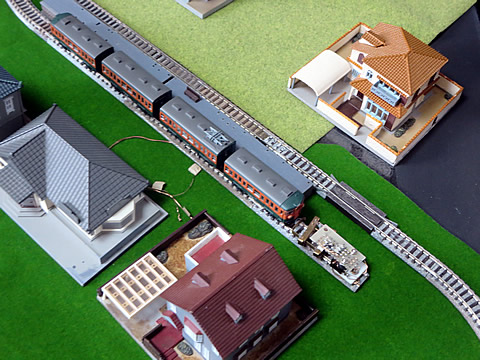
今回は、ヤードを使っているので列車の進行方向が変化します。 このため機関車系の列車では逆向き運転となってしまいますので、電車系の編成を使用しました。
走行差せている状態を下に示します。 また、下右の写真のように、制御部分を何らかの方法で覆てしまうと、見栄えが良くなるかも知れません。 でも、単なる菓子箱では興ざめしてしまいますよね。 専用のストラクチャが必要ですかね。


次回のテーマはリバース線のあるレイアウトを考えています。
2019/11/18 作成