
HOME >> 鉄道模型自動運転システム > SLモデルのグループ分け
自動列車停止装置 SLモデルのグループ分け
■ はじめに
物置部屋に設置された我がレイアウトに自動列車停止装置、いわゆるATSを設置いるが、そのスムースな運用には多くのノウハウを必要とした。 特に走行中の列車をゆっくりと鑑賞するには、同一路線を走る列車の走行速度を同じ程度に設定するのがベターであるが、その機関車の設定にいつも迷うのである。 走行させる列車編成として、その走行スピードに関して幾つかのグループに分類して同じグループ内で走行させるようにと考えて、先回はそのグループ分けの方法を報告した。
今回は蒸気機関車に限って編成を組んだ場合の新しいグループ分けの方法を報告する。
■ グループ分けの必要性
まず、グループ分けの必要性を説明しておこう。 我がレイアウトは復線のエンドレスで構成されており、 同じ路線を同時に走らせる列車を、2〜3列車を想定して、7つの区間を作ってATSが作動する様にしている。 すなわち、列車と列車の間隔は1区間は常に空いた状態で何時までも運行出来ればしめたものである。 追突事故などが起きないでのんびりと鑑賞することが出来るのである。
しかし、機関車の特性はピッタリとは一致しないので、前の列車に追いついてしまい、いつもATSのために停止するようになってしまうと不安になってくる。 ATSの作動の信頼性に不安があるのである。 このような場合は、先行列車を待避ホームに待避させて追い越をさせればよいのであるが、上り下りを同時に走らせていると、意外と面倒なのであう。
機関車の組み合わせによっては、レイアウトを1周してくる度に追い越し操作が必要となる場合もあるので、この組み合わせは重要となってくる。 DCCシステムを導入すれば簡単に解決する問題であるが、年金生活者の我が ふところ では無理である。 そこで走行スピードを揃えるためのグループ分けを実施するのである。
もう一つの目的は、重連させる機関車を設定する目安ともなるのである。
■ 今までの試み
同一線路上の複数列車運行用ではなく、重連運転のために、速度特性をまとめようとした試みは、今までも何度かトライして来た。 例えば、
- 速度特性について(2010/12/16) 3V・5V速度特性など
- 小型蒸気機関車の重連 (2013/12/6) 4V-7V速度特性
- D系蒸気機関車の重連 (2014/1/12) D系蒸気機関車の4V-6V速度特性
- 小型蒸気機関車の重連 (その4) Baldein 9 号機と Krauss 141号機 (2014/7/14) 小型蒸気機関車の4V-7V速度特性
- 自動列車停止装置 グループ分けと走行動画 (2014/10/1)
などがある。 これらのグラフ化の考えとして、パット見た目で理解できるようにと、X軸とY軸に展開する平面展開を主眼にしてきた。 しかし、表示させる種類が多くなるとゴチャゴチャしてきて見づらくなるのが欠点であった。
■ 機関車のリストとグループ分け
手持ちの機関車が多くなったのと、走行特性の測定値が揃ってきたので今回整理を実施した。 そして、その速度特性のグラフ化に対して、今までのX-Y軸表示から、単純な折れ線グラフに変更してみた。 このグラフ化の考えを下に示す。
- グラフ化の目的は、同じような速度特性を持つ機関車を見つけ出すこと。
- 走行させるレイアウトは、ミニレイアウトではなくて、ある程度の大きさのレイアウトとする。 従ってワールド工芸などの小型のSLはリストに含めていない。
- 走行させる場合のスケールスピードは、80〜110Km/h としている。 レイアウトでの走行は、実際より早めのスケールスピードに設定しておくのが見ごたえがあるからである。
- 今まで測定して来た速度特性より、3から7ボルト時のスケールスピードを 5Km/h 単位で読み取ってEXCELの表に記入する。
- 運用するスケールスピードの80〜110Km/h の範囲内で、スケールスピードの値が昇順になるように行を並び替える。
- EXCELの表を印刷し、電圧毎にスケールスピードの値を折れ線グラフとして、手書きで作成する。 折れ線を手書きとしたのは、EXCELでのグラフ化処理の方法が見つからなかったからである。
- データだけを取り出して折れ線グラフを描かせる方法はあると思われるが、モデル仕様の記述も参考にしたいので、折れ線グラフとの一体的表現が不可能であったので、面倒でも手書きとした。
そしてそのグラフを下に示す。
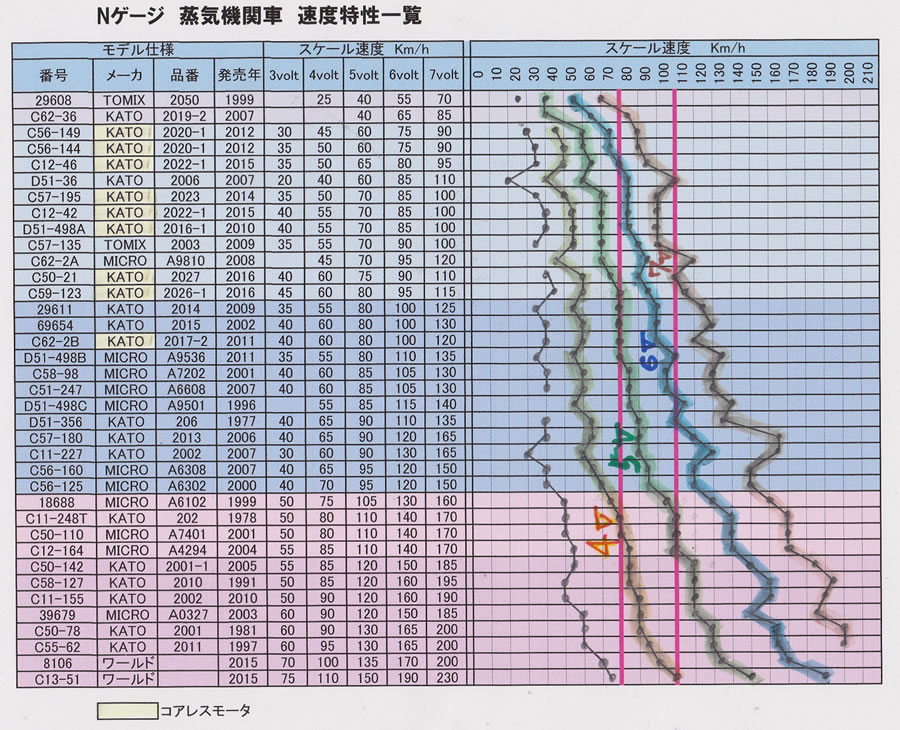
上のデータより、上下の大きく外れた例外を除き、バッサリと3つのグループに分け、セルを色分けしている。 それは、KATOのコアレスモータのグループ、従来型のKATOやMICROの足の遅いグループと足の速いグループと認識しておけばよいであろう。
このグループ内であれば、同時運行でも、また、重連走行も問題なく可能であろうと考えているし、どんな列車編成にして遊ぼうかと考えるときの参考になるであろう。 例えば、コアレスモータを搭載したKATO製の最新SLモデルは、6ボルトに設定すると80〜90Km/hのスケール速度で、各列車は同じような走行するであろうと推定できる。 もし、追いつてきた列車があれば、追い越し操作を実施すれば良いし、少しは早めの機関車では急行や特急仕立てにして遊ぶこともできよう。
尚、このデータは、小生の所有している個体での測定データであり、メンテナンス状態、すなわち車輪の汚れなどによって速度は落ちてくるので、おおまかな目安と考えて置くべきであろう。 また、牽引するか客車や貨物車両の状態によっても変化するので、実際にはそれぞれ走行させて確認すべきであろう。
■ KATOのコアレスモータモデルについて
これらのデータより、KATOのコアレスモータを採用しているモデルの速度特性が揃っている事に注目してください。 各モデルの駆動系の諸元を下の表のように整理してみた。
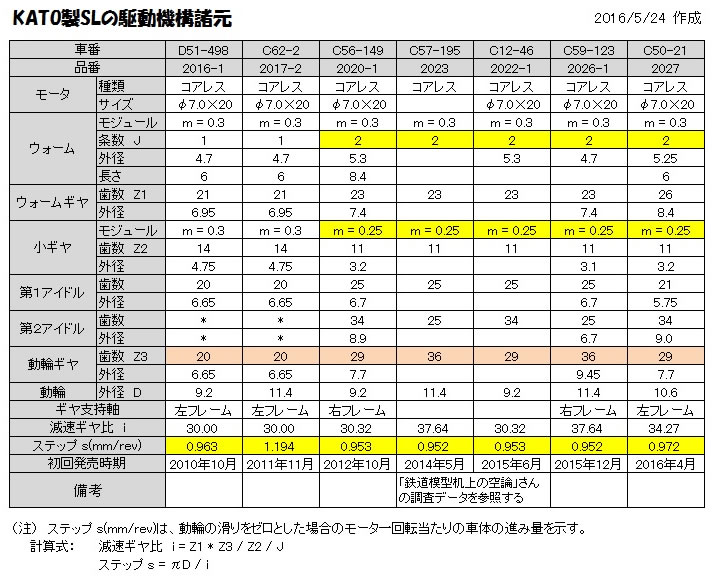
モータは巻き数などの細かい仕様が異なっているかもしれないが、形状より共通使用していると推定している。 同じモータを使って、同じような伝達機構を採用すれば速度特性は揃ってくるのであるが、動輪の直径はそれぞれのモデルによって異なっているので、減速ギヤ比で調整しているものと推定している。
ちなみに、モータの一回転当たりで車体が前に進む量を、例えば ステップ量 s mm/rev とするならば、 s = πD/ i で表される。 D は動輪直径、i は減速ギヤ比で、動輪のスリップ率はゼロとしている。 この値を計算して上の表にしめしているが、どのモデルを見ても見事に一致している。 C62を除いて。
減速ギヤの歯数の組合せをいろいろ検討された結果と思われれるが、これによって、コアレスモータシリーズの機関車は、気楽に重連走行や同時運行が楽しめことが出来るののである。 KATOさんの設計ポリシーを知ることができのだ。
2016/5/28 作成 M.T.