
HOME >> 鉄道模型自動運転システム > 登山鐡道 新自動運転システム 電気回路の動作チェック その1
登山鉄道 新自動運転システム 電気回路の動作チェック その1
■ はじめに
電子回路が出来上がって来たので、その動作チェックを実施した。 まず最初にポイント駆動と給電部の配線のチェックを手動運転回路を使って実施しした。
■ ポイントとフィーダーの配線のチェック
ポイントの配線とフィーダーの配線のチェックを行うため、手動回路で動作を確認することにした。
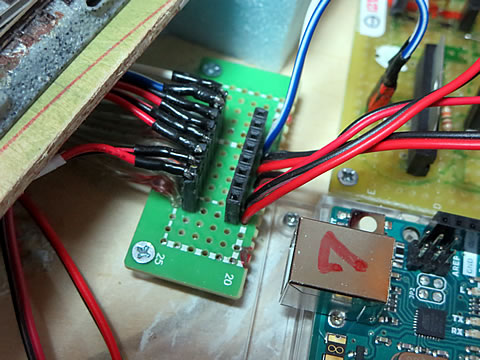
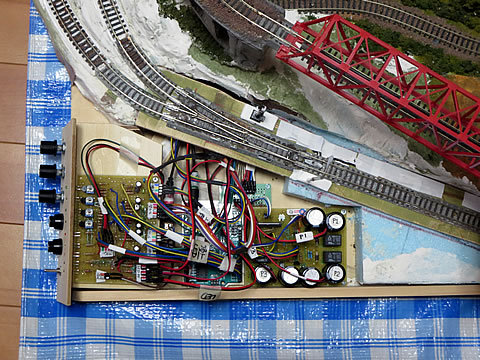
まず、このポイントの駆動と給電を手動で実施出来るように、配線の選択を手動回路にした。 その仕組みはを説明する。 下左の写真に示すように、8個のピン穴をもつソケットが2列見えるが、右側のソケットは自動運転回路であるパワープレーとに接続されている。 一方、左側のソケットの配線はレイアウトユニットの外に取り出しているので、この配線の先にある端子を、下右の写真に示すパワーパックとポイントスイッチに接続する。
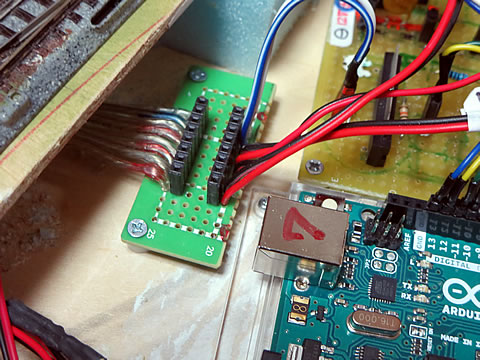

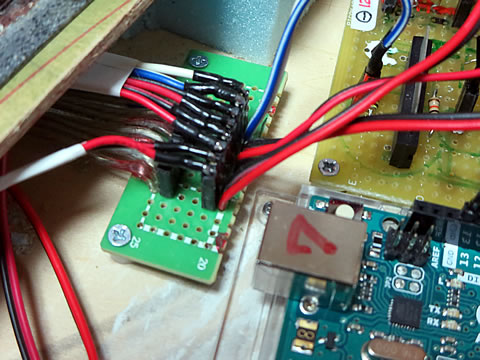
そして、3ヶ所のポイントとひとつのフィーダー部に接続された配線は、L字型のピンヘッドと接続されており、ピンヘッドを右側のソケットか、あるいは左側のソケットかに差し込むことによって選択しているのである。 今回は下左の写真のように左のソケットに差し込んで手動運転としている。 右側の写真は右のソケットに差し込んだ自動運転の場合の状態である。

 .
.
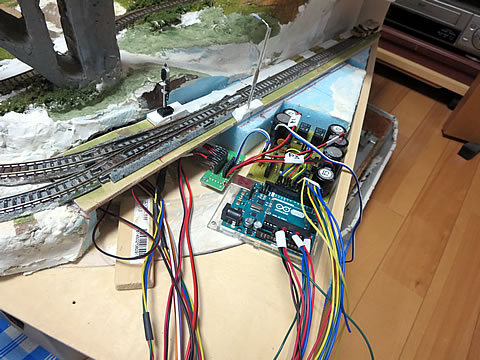
テストの状態を上の写真に示す。 制御回路は必要無いので配線途中の状態である。
右に示す車両を使用して、走行とポイントのチェックを実施した。 レールの一部には汚れがあったのでクリーニングを実施するなどのメンテンナンスを実施し、問題無く操作出来たので、配線は問題無い事を確認した。
■ レイアウト全線の確認
システムの確認のために、レイアウト全体での確認が必要であるが、実際のレイアウト上に設置してしまうと、残っている工作や修正などの作業が大変なので、このままの状態に街中駅のユニットを接続した状態で、システムチェックするkとにした。
登山鉄道ユニットと街中駅のユニットの間は、線路さえ繋がっていればシステムチェックには影響がないのである。 その状態を下に示す。



さらに、色々な部分の配線具合も確認しておくために、物理的な配線を全て実施してみた。 そう様子を上に示す。 狭い場所にゴチャゴチャの配線となってしまい、見通しが甘かったことを痛感した。 Arduino と基板を組み合わせたシールド形式の方がよかったのではないかと反省する。 取付けには工夫が必要であったが、配線に関してはもっと簡単になっていたはずである。


テストは、手動運転状態のままで、全線に亘って走行チェックを実施し、問題無い事を確認した。
次回は、この状態で制御回路に電気を流し、センサ回路などの出力を確認した結果を報告しよう。
2018/3/10 作成 M.T.