
HOME >> 鉄道模型自動運転システム > 新ATSに挑戦 駅構内の制御方法 入場制御の検討
新ATSに挑戦 駅構内の制御方法 入場制御の検討
■ はじめに
製作した制御ユニットの機能チェックのために、書斎の床の上にレイアウトを組み、システムの作動状態を観察する。 今回は、駅構内の制御方法として、入場制御の検討を実施した。
■ 駅構内を模したレイアウトと閉塞区間の設定
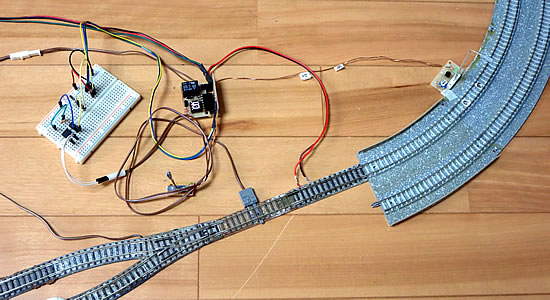
今回設定したテスト用のレイアウトを下に示す。 先回の機能チェックに使用したレイアウトをそのまま使用している。 即ち、比較的長い編成を走らせるために長円形のレイアウトにしたが、駅部分の長さを確保するために Y 字ポイントを使ったので単線での待避線のあるレイアウトになってしまった。 しかし、進行方向は一方向なので、内側を本線とし、外側を副本線と見なし、駅構内の出発と入場の制御をテストすることにした。
閉塞区間の設定のために、3ヶ所にギャップを設け、それぞれに制御ユニットを設置した。 ホームの出発側には出発制御用のユニットを配し、ホームへの入場側には入場制御用のユニットを配置した。 なお、小生はもともと自動車屋のため鉄道用語には詳しくないので、この様な用語の使い方は間違いかも知れないが、お許しください。

 .
.
列車が発車する出発側の制御については「オプション回路の検討」にておおよその概念を固めているが、ホームに入場させる場合はどうするか迷ったままであった。
ホーム途中にある通過センサを使用して列車が存在するかどうかをチェックすれば良いのであるが、どっちのセンサーで判断するのか?
うっかり待避のために停車している側のセンサで判断してしまっては永久にホームに入れないのである。 しからば、その先にある通電センサを使って判断できるのではと考えたが、先方の閉塞区間で停車中はこの部分の給電もストップしているので、ポイントの選択側を判断出来ないのだ。
出発制御には、通電がストップしていても、通行できないので問題ないのだが、入場制御の場合には、ホームが空いているのに入線できないのである。
こうして、行き着いた考えは、入場ポイントの手前の通電具合をチェックして、通電していたら列車を通過させ、ホームの選択はポイントの機械的な選択に任せれば良い事に気が付いた。
 .
.
 .
.
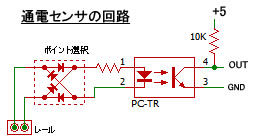
こうして構成した入線制御部分を右上の写真に示す。 TOMIX のフィーダを使用して線路の通電情報を取り込み、左の様な回路を使ってマイコンに信号を送ることにした。 フォトカプラは東芝製の TLP785 を使用し、レールに給電される電圧がプラスマイナスに変化する場合があるので、フォトカプラの前にブリッジダイードを挿入している。
この回路をブレッドボードに組み込んでテストを始めたが、最初は正常に作動しなかった。 ソフトが不良なのかハードか悪いのか判断付かず、色々いじくっていたが、やっと原因が判明した。
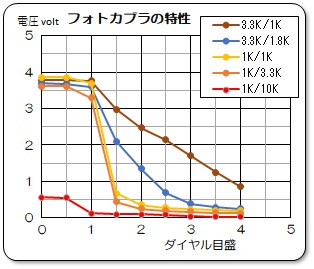
まず、不用意にブリッジダイオードとフォトカプラ間の抵抗を忘れていて、フォトカプラを壊してしまっていたのだ。 そして1KΩの抵抗を挿入したのだが、やはり正常には応答してくれなかった。 テスターを持ち出し、電圧を測定してみて始めてその理由が分かった。 HIGH レベルの電圧が低かったのである。 そこで、ブリッジダイオードとフォトカプラ間の抵抗と、出力側のプルアップ抵抗の値をいろいろかえて出力電圧を測定した結果を右のグラフに示す。 使用していた電源はTOMIX の N-1000-CL で、そのダイヤル目盛を横軸にとっている。 当初の選定してた1K/10KΩの組合せでは、ダイヤル目盛が0でもすでにLOW 状態である。 プルアップの抵抗が大きすぎたため、供給される電流が小さく、PICの入力に電流が食われているもと推定した。 仕様書が理解できていない証拠である・・・・・・・・・!
何時かは対応するかも知れない常灯システムを考慮して、非通電判定の閾値を高めに設定しておこう。 グラフの結果を見て、ブリッジダイオードとフォトカプラ間の抵抗を 3.3KΩ、プルアップ抵抗を 1KΩとすることにした
■ 入線制御のロジック検討
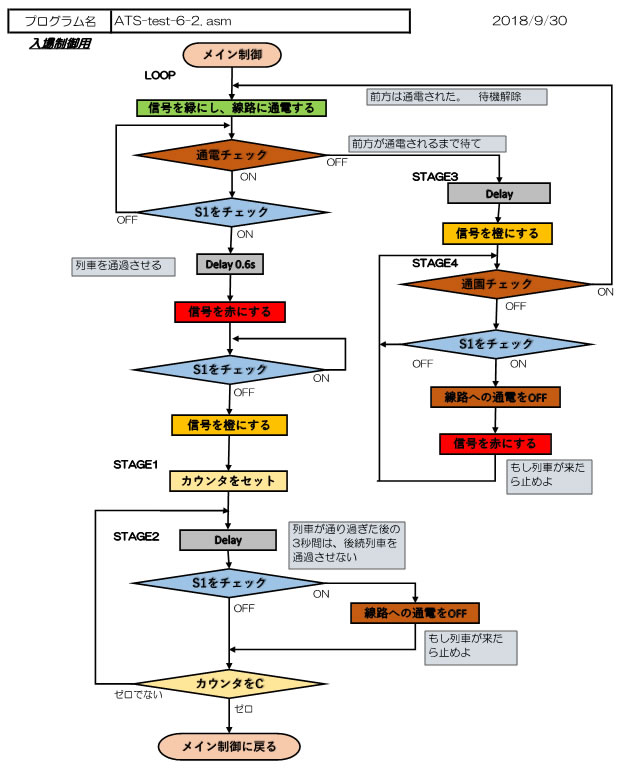
つぎに、制御ロジックを検討した。 ギャップより前の線路の通電具合をチェックして、非通電の場合には信号を注意信号にしておき、定位置まで来たら列車を停車させる。
通電されると進入OKと判断して通過させるが、列車が通り過ぎた後、後から来る列車をどうやって止めるのか、良いアイディアがなかったので、カウント方式で制約することにした。
3秒待つのだぞ!
この制御の流れを右のフr-チャートに示す。 PDFファイルも添付する。
はたして3秒で良いのかどうかは実際のレイアウト上で判断して、再チューニングが必要あろう。
この作動結果は良好と判断して、次に出発制御に取り掛かった。
2018/10/5 作成