
HOME >> 鉄道模型自動運転システム > 卓上レイアウトで楽しもう 見直しを実施する
卓上レイアウトで楽しもう 見直しを実施する
卓上レイアウトを楽しもうと銘打って、自動運転システムを工作してきましたが、ここで立ち止まって今までの工作内容を振り返ることにしました。 きっかけは、いつも愛読させてもらっています「Nゲージレイアウト国鉄露太本線建設記」さんの 2020/1/15 の記事です。 改めて読み直してみると、大いに参考とさせていただく事項を含んでいますので、このアドバイスをもとにシステムを見直すことにしました。
■ 見直しのポイント
対象としているシステムは、露太本線さんと自分とはかなり異なっていますが、使い方には似かよっていますので、アドバイスの意図を読み取って参考にさせて頂くことにしました。
なお、当初は 露太本線 とはどういう意味だろうか? と疑問を持ちながら愛読していたのですが、プロフィールにあった lofthonsen というID名を見て、やっと気が付きました。 LOFT 即ち、屋根裏部屋ですね! 鈍感でした・・・・! 最初の頃のブログを閲覧すると、確保された屋根裏部屋に苦労されながらレイアウトを設置されていました。
● ポイントのタイミングをずらした出力方法
いくつかのポイントを作動させる時、同時に出力させると電源が持たないので、時間を 20msec ずらして出力させていますが、自分は delay(500) を使っていました。500msec も取る必要がなかったのですね。 でも、ポイントがカチャカチャと作動していている音を聞くと、作動確認のチェックも兼ねているので、このタイミングのままにしておきます。
● Arduino基板を単体で置く場合は裏面を上にする
確かに気にも留めていませんでしたので、参考にさせて頂きます。 今使用している Nano Every はピンヘッダがハンダ付けされているので充分注意します。 また、箱から取り出したら使用するブレッドボードにすぐに装着するようにしましょう。
● プルダウン抵抗
信号の取り込みは、プルアップだったり、プルダウンだったりしまが、この時は、10KΩの抵抗を使用してきました。 色々な書籍を参考にして来たのでこの値を使用してきました。 BD6211の説明書でもGND間にプルダウン10KΩを推奨と記されていましたので、自分は今まで通りに10KΩで行きます。 無駄飯が増えますけど!
また、信号は正論理だったり、負論理だったりと不統一のままで使っていますが、信号線の長い場合には、待機時が HIGH 状態の負論理を使うようにしています。 このため、“すべての入出力端子にプルダウン抵抗を設置する” は保留としておきます。 また、何故出力側の端子でも必要なのか理解できていません。 Arduino側から見ると出力だが、ユニット側から見ると入力になるので、対策をと解釈するのかな?
● 電源回路構成の注意点
制御回路用の5V電源系は、当初は5V専用のACアダプターを使っていましたが、早い段階から12V電源系から 5V定電圧ユニットを使って取り出すようにしてきました。 しかし、そのスイッチ系統は別々になっており、ご指摘のような問題を含んでいました。 マイコンとして、Arduino を使ったり、PICマイコンを使ったりしたので、どちらの電源を先に投入するかをシステムに合わせるためでしたが、今はゴチャゴチャになってしまいました。
センサやスイッチなどの入力系や、駆動装置などの周辺ユニットをスタンバイ状態にしてから、メインのマイコンを立ち上げるようにしてきましたが、入力系はともかくとして、出力系の駆動装置は確かに注意が必要ですね。 コンデンサを使用しているポイント駆動回路は12V電源を使用していますが、リレー信号がOFFの場合は放電状態になるようにしていますから、まず問題無いと思います。
問題は電車を走らせるための給電制御ですね。 スイッチONと同時に電車が突然走り出す! ラズパイを使った登山電車自動運転を開発していた「レイアウトでの運行」(2017/6/22)で経験していたのですが、その経験が生かされていません。
使用したモータドライバのカタログ(説明書など)を拾ってみると、
- TA8428K モータドライバ( TOSHIBA )では、モータ電源(Vcc) 投入時は入力端子を必ず LOW レベルにし、Vccが所定の電圧になった後で、入力をきりかえること、とあります。
- TB6612FNG モータドライバ( TOSHIBA )では、電源を投入する際は、Vcc確定後にVM(モータ電源)を投入してください。 入力信号はVcc投入、確定後に入力してください、とあります。
- BD6211/BD6231 モータドライバ( ROHM )では、電源電圧(Vcc)を印加していない時は、入力端子に電圧を印加しないでください、とあります。
これらの記述から、メインの電源を投入する時は、入力信号を LOW 状態にしときなさいという事かな? そして、ここでいうLOWとは、「LOW とは0volt でもGND でもないオープン」ではなくて、GND の意味と解釈しています。
でも、電気知識の乏しい小生にとって、マイコンの電源がOFFの場合の出力信号は、どうなっているのか分かりません。 そこで、モータドライバの入力端子には、10KΩのプルダウン抵抗を追加することにします。 なお、先回の「モータドライバBD6231を使って簡易コントローラを作る」(2020/3/19)で紹介した回路は、これで正解だったようですね。
また、Arduino などのマイコンを先に立ち上げてから、周辺機器を立ち上げると、マイコンのプログラムが先に進んでしまうことになります。 マイコンのステップがどの状態にあるのかを何らかの方法でチェックしておく必要があるのです。 このため、運行開始スイッチを設けて、ここで引っかかって止まっている状態にしているのですが、問題は、セットアップループに設けたポイントの作動確認部分です。 駆動電源がOFFの状態では作動確認が出来ませので、このアイデァが生かせません。
やはり、駆動系電源を先に起動させてからマイコンが走り出すようにすることにし、このためには、駆動系ユニットの入力を確実にプルダウンさせるおく方法とすることにします。 マイコンの立ち上がりは少し遅れるようですので、12V電源投入と同時に駆動系とマイコンが作動するようにしても問題ないと判断しましょう。
即ち、操作パネルに設けた12Vのスイッチと5Vのスイッチの回路は見直し、「やるべき回路構成」のような構成、即ち、システム電源スイッチは必ず1個にすることに変更しましょう。 また、5V用スイッチはどうしようかな? Arduino Nano Every を使用する時は必要ないのですが、PICマイコンの場合に必要になるかも知れないのでそのままにしておこうかな?
なお、この際に、リセットボタンを新設してArduino のREST 端子に接続し、リセット機能を作動させるようにするつもりです。
● USBコネクタ接続時
Arduino にスケッチを書込む時はUSBコネクタを使用します。 シリアル通信用のTXとRXポートを使用していないので問題無いと思って、配線されたそのままの状態で書き込み作業を実施しようとしましたが、エラーが出て実施出来ませんでした。 勿論、他のユニットの電源は切っていました。 そこで、VIN に接続されているジャンパー線を取り外して実施するとOKだったので、それ以降は面倒でもいつもこの作業を行っています。
確かに、システムの電源を落としてもUSBを接続すると給電ユニットに設けた電源ランプが点灯しますので、どこかの経路を通して電力が供給されているようです。 そして、VIN のジャンパー線を外すと消えるので、ここから繋がっていたようです。 他の線を外すのは面倒なので、このVIN のジャンパー線の切断だけは必要の様です。
● ノイズ対策
あまり知識がありませんので、マイコン周辺とか敏感な信号線には、パスコンとして一般的に用いられている 0.1μFを使用しています。 ストック品も多数持っているためバカのひとつ覚えのようにこれ一本です。 今のところノイズで困るような高度なシステムまで発展していませんので、多数あるストック品を使うことにします。
● GNDラインの注意
“システム回路のGNDを強化してください” とあります。 今回の我がシリーズでは、各機能に合わせて多くのユニットを作ってきました。 この時に気を付けている事はGND対策です。 ユニットを接続する時、そのGND線は太めの配線とし、それらはなるべく一ヶ所に集めるようにしています。 供給側の+電極は、多少違っても影響ないと踏んでいますが、各ユニット間の基準電位差を少なくし、おかしな暗電流(?)が流れないようにするためです。 以前にどかかで読んだ覚えがありましたのでそれを実施しています。
 .
.
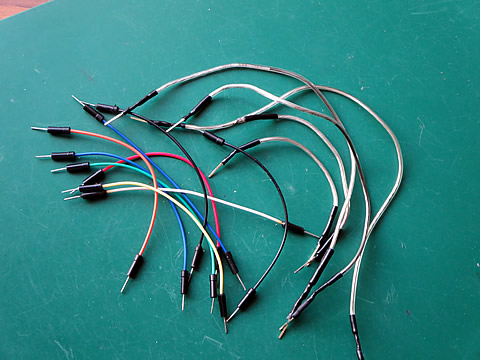
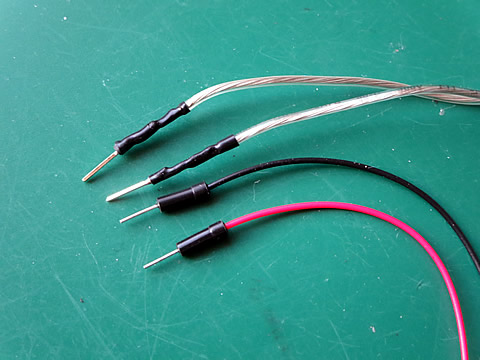
使用した GND用ジャンパー線は、スピーカーケーブルの残り線を使って、ピンヘッダのピンを端部にハンダ付けした自作のジャンパ線です。 上左の写真は長さの異なる幾つかの線と市販のジャンパー線です。 右の写真はその端子の拡大写真です。 線の太さの違いに注目してください。 また、音質を重視するスピーカーケーブルですから、純度の高い銅線を使用していると期待して使用しました。
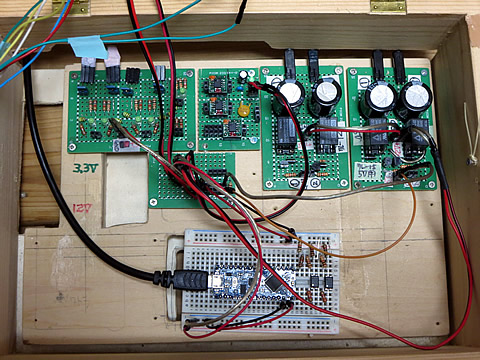
右の写真は、電源系の配線のみにしたユニット間の配線の様子です。 中央の小さめの基板が配線センターとして、12V系と5V系の電源とGNDを集めています。
この基板は、当初から使用していた物ですが、今後 Arduino Nano Every をメインに使用していくので、その時のブレッドボードを使って置き換えるつもりです。 ブレッドボードの上下の二つのラインを、12V系と5V系の電源とGNDの統一線として使用する予定です。
***************************************
今回参考にさせて頂いて知見をもとに、修正工作を実施することにします。
2020/3/22 作成