
HOME >> 鉄道模型自動運転システム > 登山鐡道 新自動運転システム 試運転の実施
登山鉄道 新自動運転システム 試運転の実施
.
■ はじめに
Arduino の制御ロジックをスケッチとして記述し、無事書き込みも出来たので、試運転を実施した。 色々なトラブルが発生したが、その対応についても報告する。
■ 試運転の様子
最初に、街中駅とスイッチバックの間の往復運転で実施した。 運行関数は direction1(0) と direction2(0) を記述し、電車1台で走らせた。 その結果、トラブル無く走行できたので、フル記述を実施し、電車3本をセットして走行させた。 この時の走行の様子を下に示す。

今度は、あちこちで問題が発生していた。 このトラブルに対して実施した対策を説明する。
(1) ポイント上で電車が止まる
 .
.
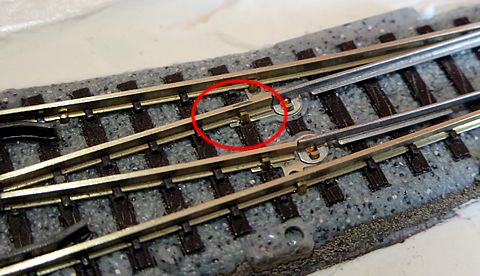
信頼していたKATO製ポイントでのトラブルなので一瞬戸惑ったが、車両によって無事通過するものと停車するものとがある点に注目した。 レール上の通電具合をチェックするためにテスターを持ち出し、左右のレール間の電圧を測定してみた。 すると、直進側のリードレール部分には通電されていない事が判明した。 ここに車両が乗っかかると、止まってしまうのである。 電車の車輪の位置や走行時の惰性具合によって、通過できる車両や速度などが分かれるようであった。
原因は、「ポイントの通電特性を測定する その4」 にて心配していたレールと電極のカシメ具合が甘いと睨んで、カシメ部分をプライヤーにて思い切り押しつぶしてみた。 右の写真の赤丸の部分。 そして、テスターで再確認すると通電していたので、原因はこれであったと断定した。 そして、関係する他の部分も増し締め(?)を実施しておいた。
(2) 線路途中で止まる
これは、テスト用の応急的な線路構成であったので、線路のジョイン部の接触不良である。 システム上の問題はないのだ。
(3) ポイントが駆動しない場合があった
これも、信頼していたKATO製ポイントでのトラブルなのであるが、ラズパイでも同じような現象があったことを思い出した。 ポイントを連続して作動させると、応答をミスする場合があったことを思いだしたので、複数のポイント作動指示の間に、delay(500) 命令を挿入したら、それ以後はこの問題は発生しなくなった。
(4) モータ音が大きい
これは、PWM制御の周波数が低い事が原因である。 供給電力を制御するモータドライバの特性上、市販のパワーユニットの様な高い周波数での制御が無理なのであるが、周波数を変えてみることにしようとした。 すると、Arduino ではラズパイの様に周波数を指定することが出来ない事が分かった。 さらに、その周波数は 490Hz とのことであった。 耳には一番聞こえやすい周波数ではないか! ピン番号の5と6を選んでおけば 980Hz となる事も分かったが、 しまった・・・・・・・・・・! と思ったがもう後の祭りであった。 今更ピン位置を変える事は出来ないのだ。 このままで、電車音を楽しむことにしよう!
■ 2列車編成での試運転
上記の対策で問題解決と判断し、今度は電車を2本にして走行させてみた。 すると、新たな問題が発生したのだ。 キャンセルした電車の出番になると、その運行をパスして次のモードに移行するのであるが、そのモードにスムースに移行する場合があると思えば、突然電車が暴走を始める場合がたびたび発生した。 そして、レールエンドに激突して脱線してしまうのだ。 最初は、何が起きているのか不明だったので、各シーケンス毎にシリアルモニタに報告させるプログラムを作ろうとした。 このために、D0/RX とD1/TX ポートを開ける様にしたのは正解だと思った。
 .
.
3台で運行する場合はシーケンスは正常に進行するのに、2台で運行するとなぜか異常行動が出てくる。 何故? 推定として電車をキャンセルした情報が正確に処理されていないのではないかと考えた。 ソフトの問題か、ハードの問題か。
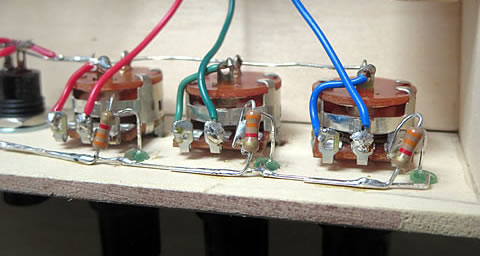
センサ回路の例からヒントを得た。 スイッチがOFFの時、LEDの点灯開始、即ち電流が流れ始める電圧がジャンプしているので、この回路が空に浮いているからではないのかと!
しかし、オシロでの波形観察の時は問題無かったではないかとの疑問がある。 でも、プローブを接続していたので、空に浮いていた回路の電荷はプローブを通してGNDに逃げていたと解釈できるので、とりあえず残留電荷を逃がすためにLEDと並列に抵抗を入れてみることにした。 そのバイパス電圧が LEDの点灯開始電圧よりも高くなるようにと、3.3KΩの抵抗を追加して、スイッチのOFF 時のLED端部の電圧を確実にゼロに落す様に工作した。 右の写真。
この対策は見事に成功した。 2編成の場合でも、また、1編成の場合でも問題無くシーケンスは進行して行き、運行ボタンをOFF にしておくと、初期の位置でピタリとシーケンスを止めて待機状態に移行するのである。
*************** 出来たぞ! **********************
苦労した後の喜びはひとしおである。
なお、何度かテストを繰り返したが、各路線での最適速度の調整は、実際のレイアウト上で実施する必要があると判断した。 また、少しぐらいの激突でも電車が脱線しない工夫が求められたので、2×5mm のヒノキの角材を使って脱線防止ガードを追加工作した。
この2列車編成での運転状況の動画を下に示す。

脱線防止ガード部分でまだ少し引っかかるの修正が必要であるが、シーケンスは順調に進行することが確認された。 また、OSが介在するラズパイと、組込方式であるArduino の違いも実感できたのである。 電源を入れると、スイッチON ですぐに走行を開始させることが出来るので、この様な自動運転にはやはりArduino の方がむいているのである。
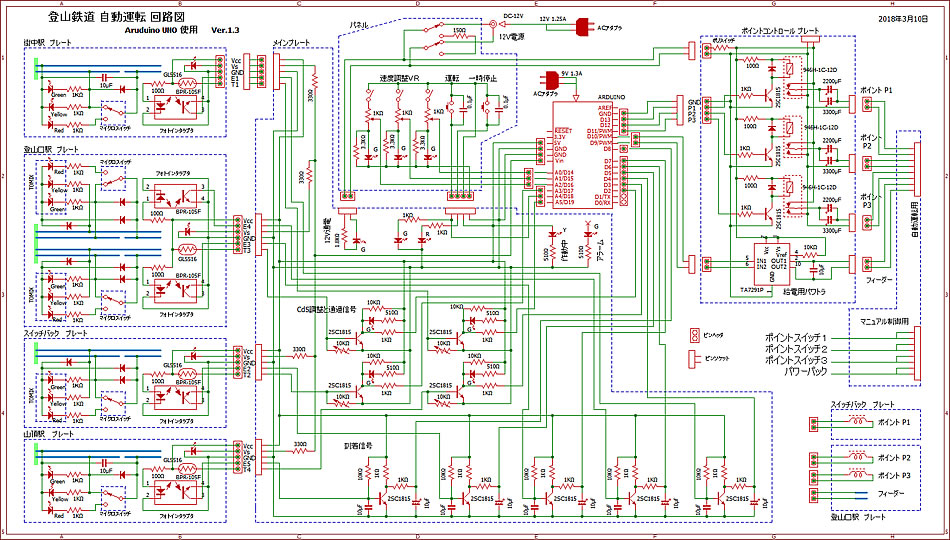
■ 修正された電子回路
自動運転システムのソフトとハードがほぼ出来上がったので、対策修正後の回路図を紹介しておきましょう。 電子回路の拡大図
システムの構築は一応形を為したので、今後はまたレイアウトの地面工作に手を加えることにする。 まずは登山電車ブロックの地面工作を仕上げよう。
2018/3/16 作成 M.T.