
HOME >> 鉄道模型自動運転システム > 制御回路の工作
登山鉄道自動運転システム 制御回路の工作
■ はじめに
システムを制御する電気回路について、各要素の機能の検証結果は良好であったので、ハード回路の工作を安心して進める事が出来ると判断し、いよいよ実回路の工作に取り掛かった。
■ 回路の一部修正
工作を始める前に、少しモヤモヤしていた件を思い切って実施することにした。 それは、ラズパイの I/O 端子を使い切ってしまうことである。 後から必要となって追加しようにも、ポートが足らなくては諦めるしか無いのであるが、一つでも残しておけば安心して進める事が出来ると考えている。
その対策として、A/D変換ICのアナログポートが4個も余っている点に注目して、デジタル信号である通過信号をこのA/D変換ICに乗せてラズパイに送り込もうとするものである。 A/D変換変換された信号は既に配線済みのSPI通信を使ってラズパイに送り込まれるので、まるまる4本の I/Oポートが解放されることになる。 アナログ値となってもプログラム処理は問題ないはずなので、思い切ってこの案を採用することにした。
修正した回路を下に示す。 ⇒ 拡大図
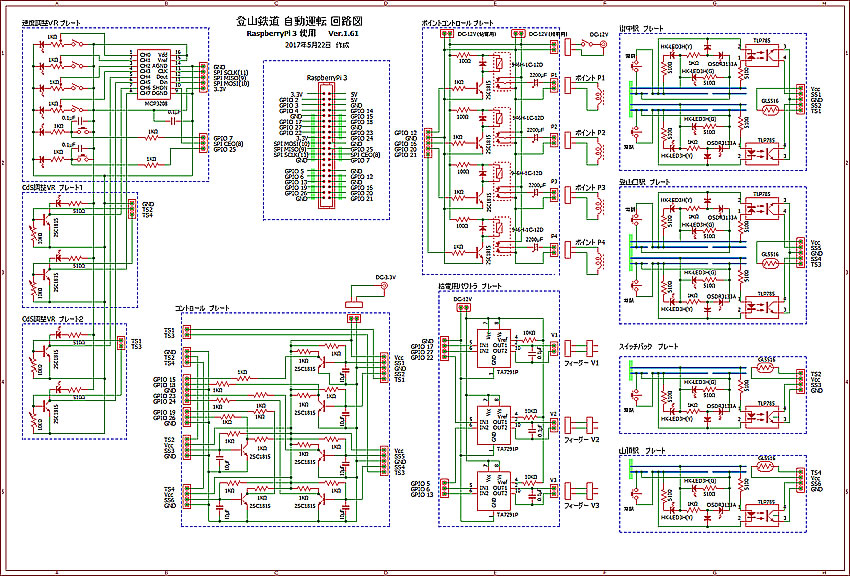
一時停止ボタンで悩んだポートの数であるが、余裕が出来たものの、12V 電源を一時的に切っておく機能は使い方があるのでこのまま実施することにする。 なお、色々なプレートを別々に構成するようにしているが、これは、ラズパイがうまく行かなかった場合には、容易に Arduino に変更できる事と、それぞれのプレートが再利用できるようにと機能的に別々の基板としているのである。
■ 制御箱
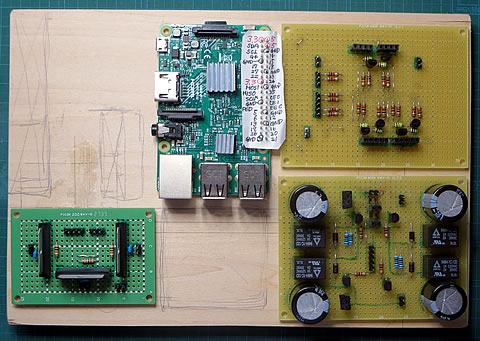
まず、制御箱を説明しておく。 ホームセンターで見つけた \980.- の木製の小箱である。 縦×横×高さが、186×261×80 の手ごろ大きさであった。 蓋は自作であるが開閉式にするつもりである。 この中には、底板を設けて基盤類を取り付ける予定だ。 2重底にして、基盤類の取外しを容易にすることをかんがえている。
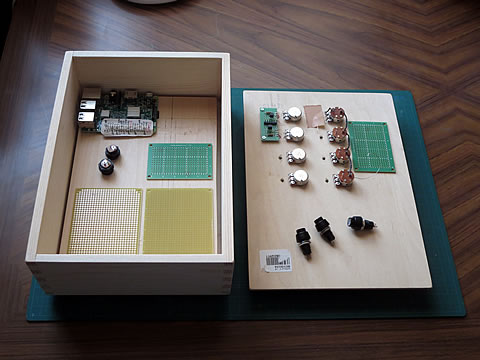
予定している基板類を置いてみて、その配置をあらかた決めたが、配線具合によっては変更する予定である。
 .
.
■ 通過信号処理回路
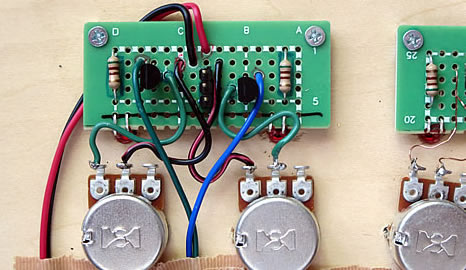
まず最初に、パネルの裏側に設置する通過信号処理回路を構成したCdS調整VR プレート2を工作する。 4個のボリュームの内、外側の2個は、「往復運転モデルを作る その2」にて既に作成済みであるが、内側の2個分の回路を工作した。
上記の回路変更に従って、出力信号は、ラズパイからA/D変換ICを組み込んだパネル内に設置する速度調整VRプレートに接続するので、パネル内で配線すれば良い事になった。
その後、先に工作していた CdS調整VR プレート1についても、回路変更の修正を実施した。
■ 速度設定処理回路
同じパネル内側に設置する速度調整VRプレート上に、この速度設定処理回路を工作した。 さらに二つのプッシュ式スイッチの回路も構成している。
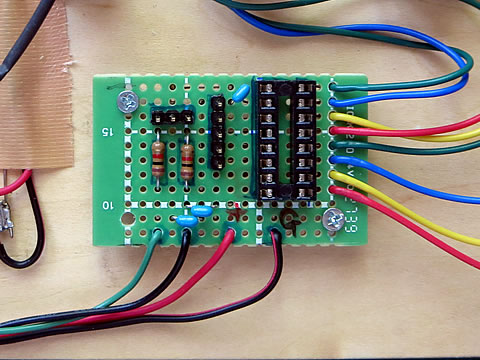
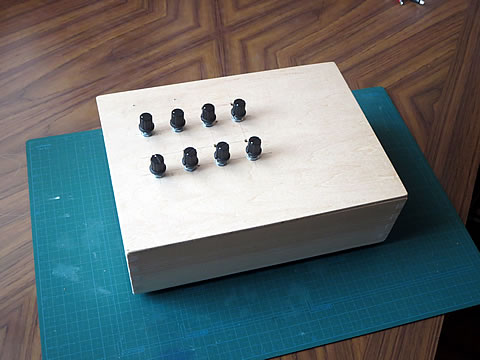
操作パネルに設置した状態を下に示す。 一番外側のスイッチは12V 電源を一時的に ON/OFF するスイッチである。
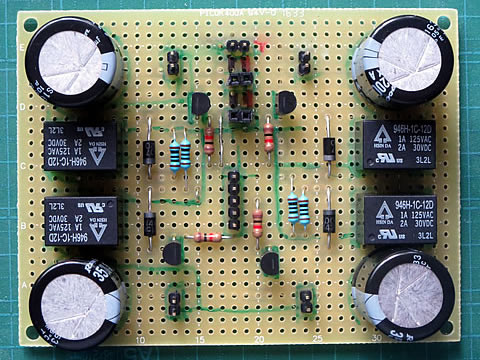
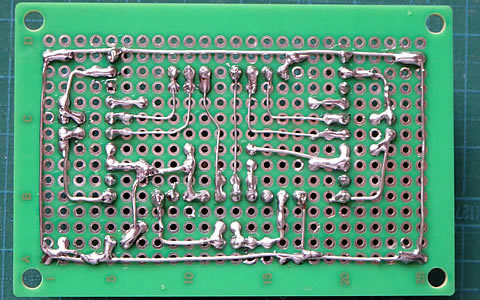
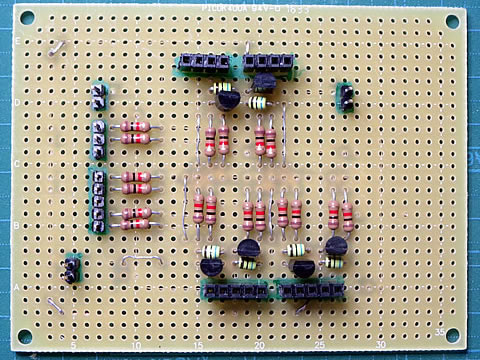
■ ポイント駆動回路
 .
.
ポイント駆動回路はポイントコントロールプレート上に構成する。 大きなコンデンサを四隅に配置した。 中央の上部には AC アダプターからの12Vを供給する。 そして、ここより電車の走行用パワートラ回路にも電源を接続できるように端子を設けている。 そして、建物類の照明用電源としてもここから供給できるようにした。
機能実験の結果より、容量の大きいフリーホイール・ダイオードを採用することにしたので、リレーと並列に配置した。 また、100Ωの抵抗についても安心のために挿入している。
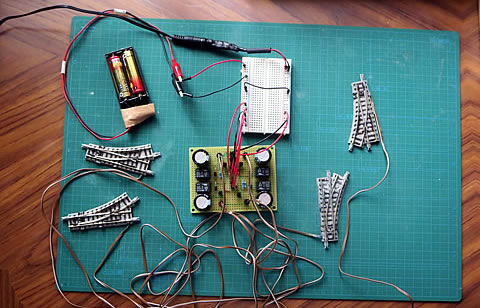
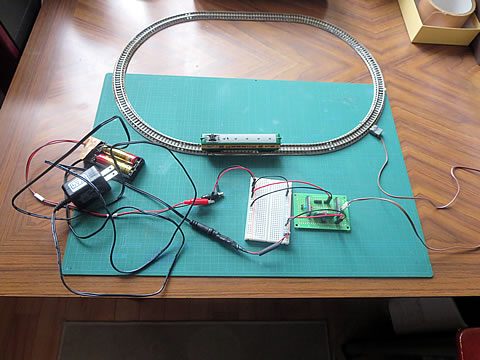
プレート工作が完了すると、簡単な機能テストを実施した。 12VのAC アダプターから電源を取り、TOMIX のミニ電動ポイント4個をそれぞれ接続して、乾電池からの電圧を信号として接続し、ポイントの作動を確認した。 右の写真。
信号をON にするとポイントは分岐し、OFF にすると直進状態に復帰した。 ずべての回路は快調に作動することを確認した。
■ 給電制御回路
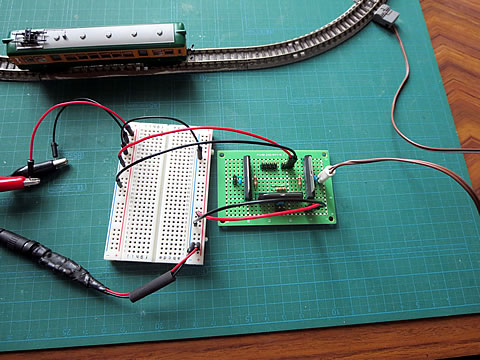
走行する電車の速度を調整する給電制御回路を給電用パワトラプレート上に構成する。 このプレートは回路が簡素であるため、小ぶりの基板を使用した。 当初計画した回路からは、教則本の例を参考にして、モータードライバーTA7291P のピン4のVref とピン8のVs との間に 10KΩの抵抗を挿入しており、さらにモータのノイズ対策として 0.1μFのコンデンサも回路中に挿入した。
プレート完成後に下のように電車を走らせて機能テストを実施した。 乾電池2本でのON/OFFテストであったが、3個の回路共に正常に機能することを確認した。
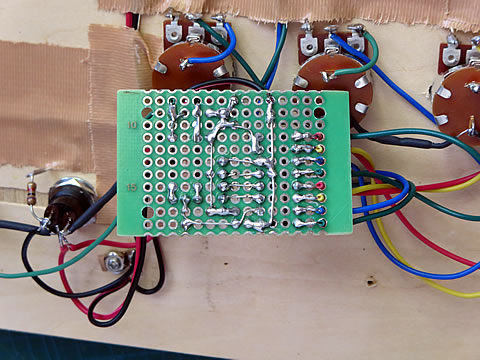
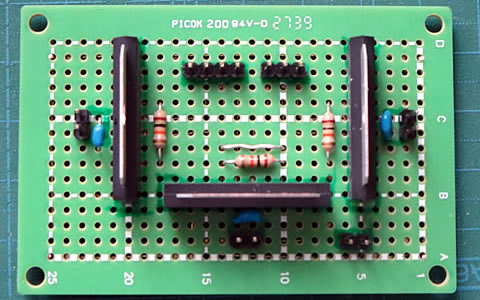
■ 到着信号処理回路ほか
最後に、到着信号など、センサとラズパイの間のつなぎ回路を構成するコントロールプレートを工作する。 A/D変換IC を移動させたので簡単な回路構成となったが、センサからの配線とラズパイへの配線が交差する構成となっている。
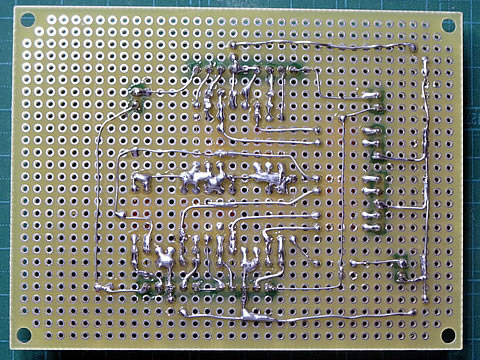
ラズパイとの接続は、ラズパイの方向より縦に並ぶピン配列として、コードの無理な配線を避ける配慮をした。 また、ラズパイ側がオスのピンなので、こちらもオスピンとしている。 センサとの配線端子は、メスピンとして誤配線を防止すると共に、電源の上流側になるので家庭用コンセントに倣ってメス口としているのである。
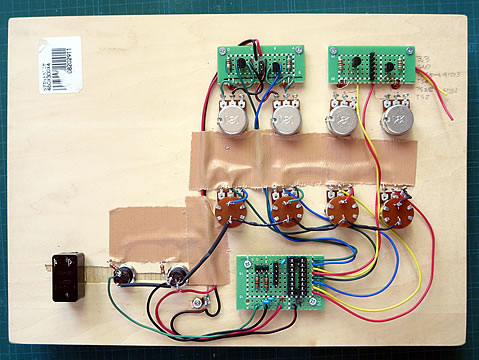
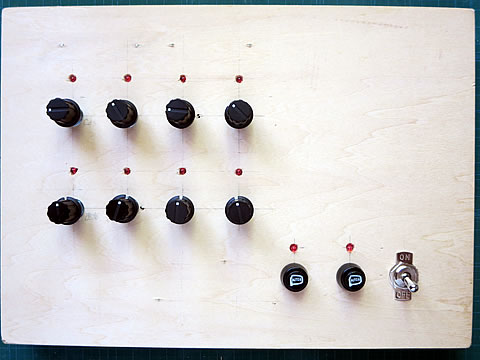
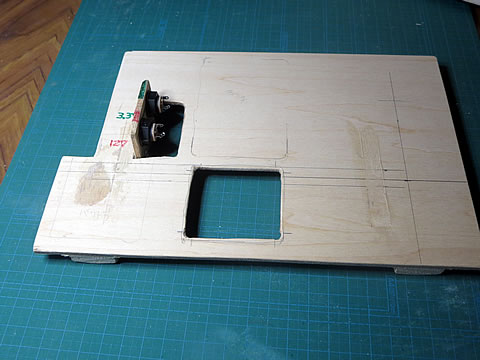
■ 制御箱の工作
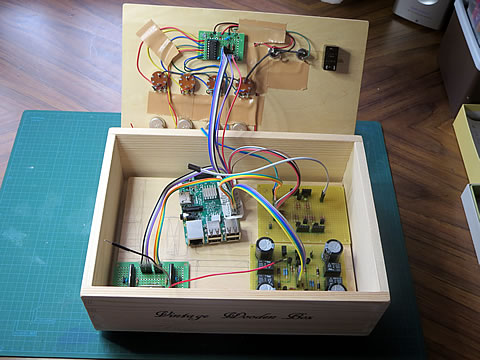
各プレートの工作が終了したので、制御箱に収めることにした。 まず、各プレートの配置をもう一度検討した。 当初は、ラズパイやACアダプタのケーブル類は、箱の側面に穴を開けて、そこから差し込むことを考えていたが、どう見ても外観上、美しい格好とは言えないと考えた。 そこでこれらのケーブル類はすべて底面から取り入れる方式に変更することにした。
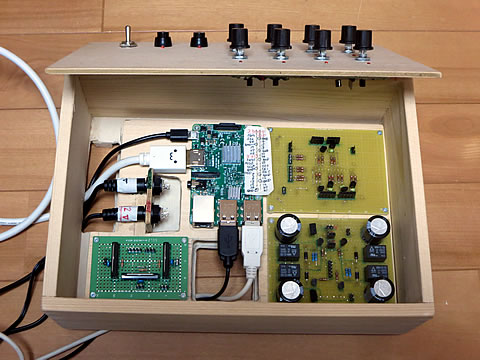
そこで、底面プレート上に基板類を並べてケーブル類の取り回しを考えた。 上左の写真。 一番の問題はラズパイとモニタを結ぶHDMIケーブルである。 硬くて太いので、挿入部とラズパイを充分に離して、無理なく配線出来る距離を確保する必要があった。 このため、当社は左下の隅に置く予定だったが、中央の上部に設置することにした。 マウスやキーボードと接続するUSBケーブルは中央部の穴を通すことにし、すっきりとした配置が決定した。 そして試しに内部配線類を接続してみた。 上右写真。

内部の配線は、玄人志向のRaspberry Pi 3を使った自作IoT体験キット「KURO-IOTEXP/KIT3」に含まれていたジャンパーワイヤ1(オス〜オス) を主に使用したが、長さが合わないものなどは自作することにする。 制御箱の蓋は制御盤としても使用している。
配置が決まったので、制御箱の底と底板を加工してケーブル類の差し込み口を作り、 12Vと 3.3V 用のDCジャックも取り付けた。

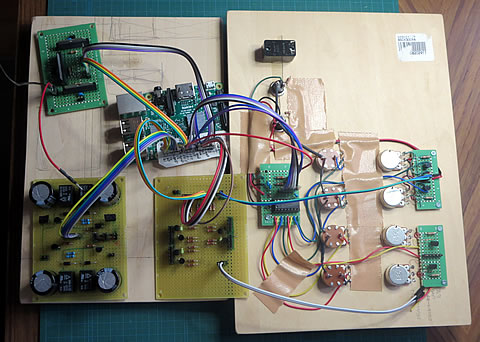
そして、実際にケーブル類を取り付けた状態を下に示す。

ここまでくれば、後はは実際の配線を実施して、プログラムを作っていく事になるのだ。
2017/5/28 作成 M.T.