
HOME >> 鉄道模型自動運転システム > 卓上レイアウトで楽しもう 自動運転 その5−1
卓上レイアウトで楽しもう 自動運転 その5−1
最新のユニットを使って、今までのシステム構成を見直して行きますが、まず手始めに「自動運転 その5」(2019/11/18)のユニット構成を変更しました。
■ システム構成

 .
.
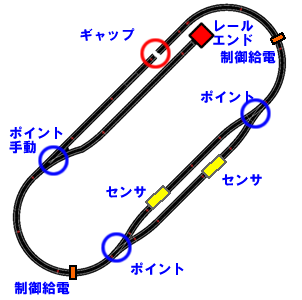
レイアウトは、上左に示すように、「自動運転 その5 」 の場合と同様な構成にしています。 給電のためのフィーダー線は両側のに同じ線として配線しました。 そして手製のコントローラを使って、手動での試運転を実施し、正常に走行できることを確認しました。
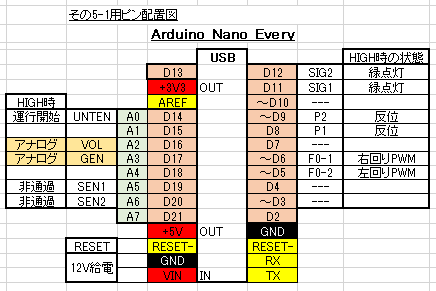
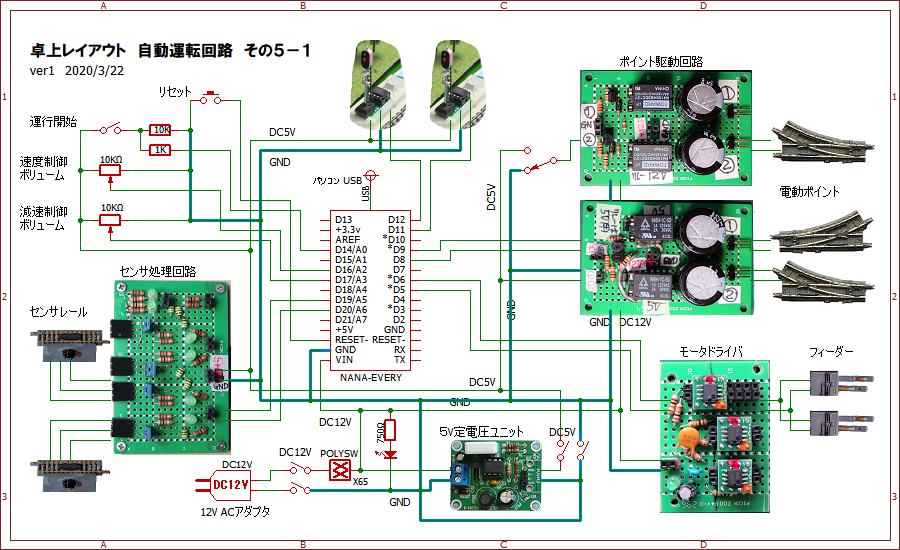
制御用コンピュータは Arduino Nano Every を使用し、周辺のユニットは見直し後の最新(?)ユニットを使用します。 Every のポートには余裕がありますので、ピンの差込みが容易なようにと間隔を開けて配置しました。 ポートの配置図を右にしめす。回路図を下に示します。
出力ユニットにおいて、入力側にプルダウン回路を追加していますので使用しないポートには配線を実施していません。 このために、配線が少し楽になりました。 また、減速制御用のボリュームやリセットスイッチも追加しています。
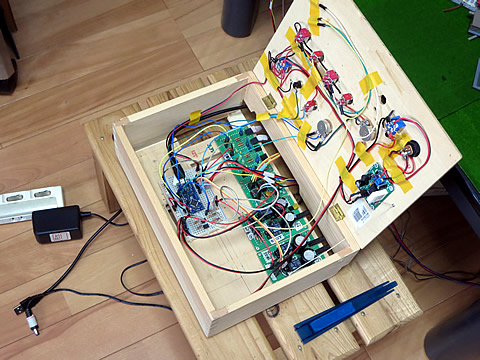
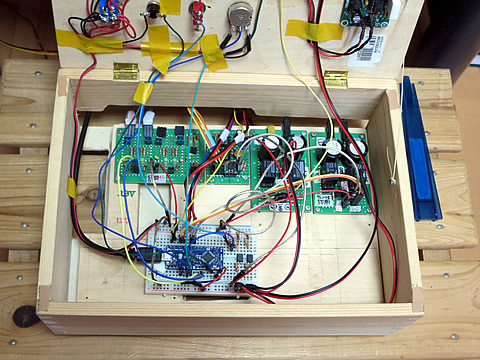
配線状態を下に示します。
■ 制御プログラム
スケッチの記述は、今までの方法を踏襲しています。 シケンスはシンプルなので順次記述しています。
制御スケッチ: Every_RF_5-1
まず、PWMキャリア周波数を15.7KHz に設定しておきます。 そして、ポイントの駆動チェックを実施後に、運行開始スイッチがON されるまで待機します。
- 運転スイッチがONされるまで待機。
- ポイントの設定と信号機を緑にして、左回りの周回のために発進し加速する。
- 通過センサの検知まで待機
- 信号を赤にして、減速して停車
- ポイントの設定と信号機を緑にして、右回りの周回のために発進し加速する。
- 通過センサの検知まで待機
- 信号を赤にして、減速して停車
このシーケンスを繰り返し実行するように記述している。 勿論、随所に速度調整用のボリュームの値を読み取り、走行中の速度をPWM 信号として出力している。
● 運転状況
今回は、進行方向が両方向ありますので電車を走らせました。 機関車の方向転換ができませんので・・・・・。 3両編成のBトレの名鉄電車を3セット用意して交互に走らせました。


● チョットしたお遊び
3編成の電車を使って運転を楽しんでいたが、ヤードの無い状態でも自動的に運行出来る事に気が付きました。 そこで下のように線路構成を少し変えて自動運転させてみました。


プログラムは何も変えていないのですが、第3の列車の存在によって、見事な振り子運動のようなシーケンスが運行されています。

見ていても飽きませんが、最終的にはどの様な状態に収束するのだろうかと、興味を持って見ていました。 足の遅い電車が1編成あるので、この動きがその状態を決めるようです。 だんだん電車間の間が詰まっていくのかなと思っていたら、駅から出て行く先行する電車がレールエンドまで走行してしまって、後からのんびりと走ってくる電車の駅への到着を待っている状態も発生していました。 どうやら、この運行形態は不安定のようですね。
2020/3/30 作成