
HOME >> 鉄道模型自動運転システム > 自動列車停止装置 試運転の実施
自動列車停止装置 試運転の実施
■ はじめに
物置部屋に設置された我がレイアウトに、無謀にも追突防止の自動列車停止装置、いわゆるATSを設置しようと挑戦を始めた。 構想検討が固まったので、いよいよレイアウトへの設置作業を始める。
制御盤をレイアウトに設置して、チェックと調整が完了したので試運転を実施したが、色々なトラブルが発生してしまった。 システムとしての検討不足もあったが、鉄道模型の基本を再認識させられたことも勉強となった。
■ 試運転でのトラブル
いよいよ試運転が出来るようになったので、色々な車両を走らせてみた。 しかし、トラブル続出であった。 自然解放、脱線、追突などが発生し右往左往であった。 原因は車両の整備不良や、レイアウトのメンテナンス不良であったし、システムの限界でもあった。
ここで、システムさえ出来れば後は楽々と思っていた呑気な考えが吹っ飛んでしまったのである。 色々な不具合の様子を整理しておこう。
- 1)線路のメンテナンス不良
- 動力車が途中で止まってしまう不具合が発生した。 原因は線路のメンテナンス不良である。 最近動かす事が少なかったので、早速レールのクリーニング作業が要求されてしまった。 鉄道模型の基本中の基本ですね。 また、我がレイアウトはブロック毎に分かれているため、そのつなぎがどうしても甘くなり、線路がゆがんだり凸凹してしまっている。 また、部分的にフレキブルレールも使っており、レールの設置精度は芳しくないのである。 車両がピッチング起こしながら走行する箇所が何ヶ所もあるのであるが、これが車両によっては脱線の原因ともなっている。 今更修正は難しいので、このような車両は走行を遠慮してもらっている。
- 2)車両のメンテナンス不良
- 動力車の車輪のクリーニングも必須条件ですね。 車両によって動きがギクシャクするものあるので、これではスムースな運転は不可能です。 さらに、カプラーも要注意です。 自然解放してしまうと、後続車に追突され脱線してしまいます。 たまたま、センサ部分で取り残される貨車があり、このために後続の列車が停止してしまって原因が分からずにウロウロした事がありました。
- 3)停車位置制御の有用性を知る
- 3編成で走行させている時、何故か追突事故が発生してしまった。 原因を探っている時に、その理由がやっと判明した。 その時の様子を下のイラストで示す。
列車2は列車1のセンサ1の信号により停止中であるが、センサ2までは達していないのでセンサ2をONさせる事が出来ていない。 このため後続の列車3は停止することなく列車2に追突したのである。 これはシステム上の盲点となっていた。
対策としては、列車2をセンサ2の位置まで走行させ、センサをONさせて停止すれば良いのである。 すると列車3が走行している次の区間も閉塞させる事ができるので、列車3を停止させる事ができる上に、列車2は前の閉塞区間内まで走行しているので、追突する事も無い。
なんとこの機能は、我がシステムに既に備わっていたのである! 「ATS のシステム要件」で説明した停止位置 Lf をゼロにするように、閉塞区間の先頭部分にもセンサーを配置して、先行区間にあるセンサーとのANDを使って列車を止めようとするロジックである。 この停車位置制御をONにしておけば( 即ち、スライドスイッチを左にして置く )、このような状態で追突を起こす事を防止できるのである。 - 4)同時に走行させる列車編成の速度差は小さくしよう
- 「ATS のシステム要件」でも説明したように、このシステムには限界があり、どんな編成でもATSが機能する万能のシステムでは無い事を痛感する。 KATOのC57はすぐに追いつかれて追突の憂き目に何度も遭遇している。 レイアウトの区間設定も均等な長さではないし、区間7は非制御ゾーンである。 このため、出来るなら同じメーカーの同じ系列(新旧の構造の違い)の動力車を走らせるのが安全である。
- 5)フライホイール搭載車は低速で走らせよう
- 最近のフラーホイール搭載車は電源を切っても惰行距離が長くなっている。 折角、電源をOFFにして停止させようとしても、通電している前の区間まで惰行していき、再び走りだす状態を何度も観察した。 そして、そのまま、前に列車に突進してしまうのである。 レイアウトを一部見直して、ギャップジョイナーの位置を変更して対策したが、このようなフライホイール搭載車はなるべく低速走行させ、惰行距離を短くするようにするのが望ましいようである。
- 6)動力車を補強しよう
- 編成を長くすると制御には有利となるが、今度は登坂路を登るのが苦しくなってしまう。 坂の途中でスタックしてしまい、後続列車に追突される現象も発生してしまった。 この場合は機関車を重連させパワーアップさせる必要がある。 マイクロのSLは力強くて頼もしいし、ELの中には意外とか弱い車両もある事を認識させられた。
■ 試運転の状況
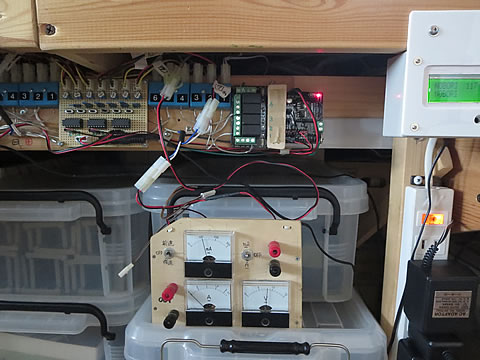
やっとこのシステムを運用する上でのノウハウを得る事が出来たので、運行への自信が湧いて来た。 ここで、試しに次のような編成で走らせてみた。 まず、下の写真に示すように、KATO のカシオペアの7両編成でを走行させた。


給電状態として、電圧と電流を測定する。 測定ユニットは以前から使用しているもので、コネクタの差し替えで容易に設置出来た。 これは便利ですな。
 .
.
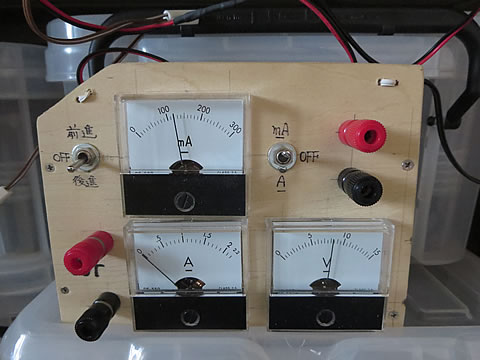
走行速度は、うってつけの速度計を活用する。 右の写真。 電圧 8Volt でスケールスピード 149Km 。 これは少しスピードの出し過ぎのようですが、レイアウト上では、やや高めの方が 「走らせている」 という感じがしますね。
電流は、150〜200mA 程度で走行しており、この程度の電流では、全部で3〜4編成は同時に走らせることが出来そうである。
次に、寝台特急「富士」の7両編成をEF65 1103号機(KATO :3061-1)で牽引させた編成を仕立てて走らせた。 下の写真。


この二つの編成を同時に走らせた場合、電圧は7.8Volt、電流は200〜300mAであり、パワーユニットはまだ充分に余裕がある状態であった。 気になる速度は、富士が、138〜149Km/hで、カシオペアが131〜135Km/h であった。 走行速度は富士がやや速めであったので、後ろから追いついて来たが、規定位置で停車するなどシステムは正常に作動し、10分間以上も安心して眺めている事が出来た。 やっとまったりとした気分で観察する事が出来たのである。
このように、編成毎に電圧とスケール速度を測定しておき、幾つかのグルーピングを行っておけば、安心して走らせることが出来そうである。 走行状態は、車両のご機嫌具合によって変化するので詳しく選別する事は無駄と思われるが、このグループ分けを参考にして、その日に走らせたい列車を選択すれば良さそうである。
■ 運用マニュアルの素案
これまでの結果を踏まえて、このシステムを上手に運用するには、「運用マニュアル」が必要であるとの考えに至ったのである。 取りあえず、気が付いたポイントを書き出しておこう。
- 1) 線路は常にメンテナンスしてクリーンな状態にしておこう。
- これは当然の事であるが、このシステムでは必須である。 途中でのノロノロ運転やストップは大きな速度差が発生することであり、追突の原因となる。 また、線路の凸凹や障害物の有無もチェックしておこう。
- 2) 動力車の整備不良もスムースな運転を阻害する。
- これも当然のことである。 さらにカプラーの状態もチェックしておこう。
- 3) 同時に走行させる列車編成の速度は、なるべく合わせよう。
- 出来るなら速度を合わせると、制御によって停止させられる場合が少なくなり、制御OUTによる追突の発生が少なくなる。
- 4) 出来るなら同じ系列の動力車を走らせよう。
- 同じ仲間なら速度差が少なくなるので、気持ちよく走行させる事が出来る。 でも色々な列車を同時に走らせるのも楽しみではあるが・・・・・・。
- 5) 定位置制御をONにして運行しよう。
- 追突防止のため、この有用な機能を活用しよう。
- 6) 編成はある程度の長さを確保し、パワー不足になったら重連させよう。
- 当システムは、編成長さが長いほど有利であるが、その分、登坂能力のアップが必須となる。 機関車を重連させるのでの工夫が必要である。
- 7) フライホイール搭載車は低速で走らせよう。
- 停止時のオーバーランを防止するためである。 安定した低速走行を楽しみましょう。
- 8) 後ろから追い付いてきたら退避ホームに退避し、さっさと追い越しさせよう。
- 足の速い後ろの列車をいつまでもじらしていると、そのうち爆発する。 システムの信頼性には自信がないので、危険な状態は出来るだけ避けるようにしよう。
取りあえずは、こんなところでしょうか。 さらにノウハウが貯まったら追加しておこう。